Les polymères électroactifs, ou EAP, sont des polymères qui présentent un changement de taille ou de forme lorsqu’ils sont stimulés par un champ électrique. Les applications les plus courantes de ce type de matériau sont les actionneurs et les capteurs. Une propriété caractéristique typique d’un PAE est qu’il subira une grande quantité de déformation tout en maintenant des forces importantes.
La majorité des actionneurs historiques sont fabriqués à partir de matériaux piézoélectriques en céramique. Bien que ces matériaux soient capables de résister à des forces importantes, ils ne déforment généralement qu’une fraction de pourcent. À la fin des années 90, il a été démontré que certains PAE pouvaient présenter une contrainte allant jusqu’à 380%, ce qui est beaucoup plus que tout actionneur en céramique. L’une des applications les plus courantes des PAE est la robotique dans le développement de muscles artificiels; ainsi, un polymère électroactif est souvent appelé un muscle artificiel.
L’histoire
Le domaine des EAP est apparu en 1880, lorsque Wilhelm Röntgen a mis au point une expérience dans laquelle il testait l’effet d’un champ électrostatique sur les propriétés mécaniques d’une bande de caoutchouc naturel. La bande de caoutchouc était fixée à une extrémité et était attachée à une masse à l’autre. Des charges électriques ont ensuite été pulvérisées sur le caoutchouc et il a été observé que la longueur était modifiée de plusieurs centimètres. MP Sacerdote a donné suite à l’expérience de Roentgen en formulant une théorie sur la réponse des contraintes à un champ électrique appliqué en 1899. C’est en 1925 que le premier polymère piézoélectrique a été découvert (Electret). Electret a été formé en combinant de la cire de carnauba, de la colophane et de la cire d’abeille, puis en refroidissant la solution pendant qu’elle est soumise à une polarisation électrique à courant continu appliquée. Le mélange se solidifierait ensuite en un matériau polymère présentant un effet piézoélectrique.
Les polymères qui répondent aux conditions environnementales, autres qu’un courant électrique appliqué, ont également constitué une part importante de ce domaine d’étude. En 1949, Katchalsky et al. ont démontré que lorsque les filaments de collagène sont plongés dans des solutions acides ou alcalines, ils réagissent par un changement de volume. On a constaté que les filaments de collagène s’étendaient dans une solution acide et se contractaient dans une solution alcaline. Bien que d’autres stimuli (tels que le pH) aient été étudiés, du fait de leur facilité et de leur caractère pratique, la plupart des recherches ont été consacrées à la mise au point de polymères répondant aux stimuli électriques afin d’imiter les systèmes biologiques.
La prochaine avancée majeure dans les PAE a eu lieu à la fin des années 1960. En 1969, Kawai a démontré que le polyfluorure de vinylidène (PVDF) présentait un effet piézoélectrique important. Cela a suscité l’intérêt de la recherche pour développer d’autres systèmes de polymères qui montreraient un effet similaire. En 1977, les premiers polymères électriquement conducteurs ont été découverts par Hideki Shirakawa et al. Shirakawa avec Alan MacDiarmid et Alan Heeger ont démontré que le polyacétylène était électriquement conducteur et qu’en le dopant avec de la vapeur d’iode, ils pourraient augmenter sa conductivité de 8 ordres de grandeur. Ainsi, la conductance était proche de celle d’un métal. À la fin des années 1980, il a été démontré qu’un certain nombre d’autres polymères présentaient un effet piézoélectrique ou étaient conducteurs.
Au début des années 90, les composites polymère ionique polymère-métal (IPMC) ont été mis au point et se sont avérés présenter des propriétés électroactives bien supérieures aux précédentes PAE. Le principal avantage des IPMC était qu’ils étaient capables de montrer une activation (déformation) à des tensions aussi basses que 1 ou 2 volts. Ce sont des ordres de grandeur inférieurs à tous les PAE précédents. L’énergie d’activation de ces matériaux était non seulement beaucoup plus faible, mais ils pourraient également subir des déformations beaucoup plus importantes. Il a été démontré que les IPMC présentaient une souche pouvant atteindre 380%, un ordre de grandeur supérieur à celui des PAE précédemment développés.
En 1999, Yoseph Bar-Cohen a proposé le Match Armwrestling du défi bras robotique EAP contre Human. C’est un défi auquel des groupes de recherche du monde entier se sont fait concurrence pour concevoir un bras robotique composé de muscles du PAE pouvant vaincre un humain lors d’un match de bras de fer. Le premier défi a été organisé lors de la conférence des dispositifs et dispositifs électroactifs à polymère en 2005. Une autre étape importante dans ce domaine est que le premier dispositif développé commercialement, comprenant des PAE en tant que muscle artificiel, a été produit en 2002 par Eamex au Japon. Ce dispositif était un poisson capable de nager seul, bougeant sa queue avec un muscle EAP. Mais les progrès dans le développement pratique n’ont pas été satisfaisants.
Des recherches financées par la DARPA dans les années 1990 chez SRI International et dirigées par Ron Pelrine ont permis de mettre au point un polymère électroactif utilisant des polymères de silicone et d’acrylique; la technologie a été intégrée à la société Artificial Muscle en 2003, avec une production industrielle débutant en 2008. En 2010, Artificial Muscle est devenue une filiale de Bayer MaterialScience.
Les types
Le PAE peut avoir plusieurs configurations, mais est généralement divisé en deux classes principales: diélectrique et ionique.
Diélectrique
Les PAE diélectriques sont des matériaux dans lesquels l’actionnement est provoqué par des forces électrostatiques entre deux électrodes qui pressent le polymère. Les élastomères diélectriques sont capables de supporter des contraintes très élevées et sont fondamentalement un condensateur qui change de capacité lorsqu’une tension est appliquée en permettant au polymère de se comprimer en épaisseur et de se dilater en surface en raison du champ électrique. Ce type de PAE nécessite généralement une tension d’actionnement élevée pour produire des champs électriques élevés (des centaines à des milliers de volts), mais une consommation électrique très faible. Les EAP diélectriques ne nécessitent aucune alimentation pour maintenir l’actionneur dans une position donnée. Des exemples sont les polymères électrostrictifs et les élastomères diélectriques.
Polymères ferroélectriques
Les polymères ferroélectriques sont un groupe de polymères polaires cristallins qui sont également ferroélectriques, ce qui signifie qu’ils conservent une polarisation électrique permanente qui peut être inversée ou commutée dans un champ électrique externe. Les polymères ferroélectriques, tels que le polyfluorure de vinylidène (PVDF), sont utilisés dans les transducteurs acoustiques et les actionneurs électromécaniques en raison de leur réponse piézoélectrique inhérente et comme capteurs thermiques en raison de leur réponse pyroélectrique inhérente.
Polymères greffés électrostrictifs
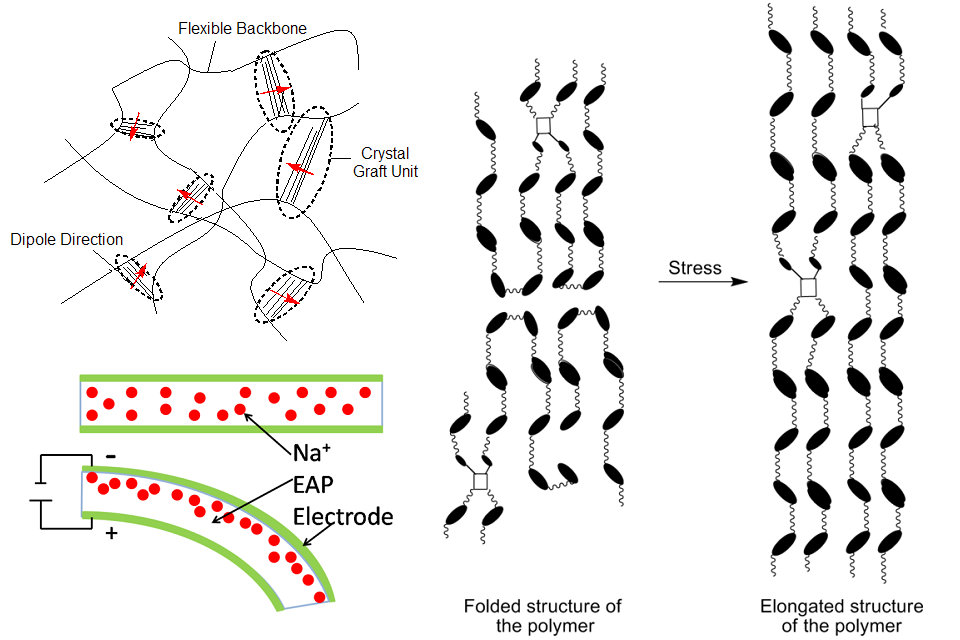
Les polymères greffés électrostrictifs sont constitués de chaînes dorsales flexibles avec des chaînes latérales ramifiées. Les chaînes latérales des polymères dorsaux voisins se lient et forment des unités cristallines. Les unités cristallines du squelette et de la chaîne latérale peuvent alors former des monomères polarisés, qui contiennent des atomes avec des charges partielles et génèrent des moments dipolaires, illustrés à la figure 2. Lorsqu’un champ électrique est appliqué, une force est appliquée à chaque charge partielle et provoque la rotation de l’ensemble. unité polymère. Cette rotation provoque une contrainte électrostrictive et une déformation du polymère.
Polymères cristallins liquides
Les polymères cristallins liquides de la chaîne principale ont des groupes mésogènes liés les uns aux autres par un espaceur flexible. Les mésogènes à l’intérieur du squelette forment la structure mésophase, ce qui amène le polymère à adopter une conformation compatible avec la structure de la mésophase. Le couplage direct de l’ordre cristallin liquide avec la conformation du polymère a donné un grand intérêt aux élastomères cristallins liquides de la chaîne principale. La synthèse d’élastomères hautement orientés conduit à un actionnement thermique en contrainte important dans la direction de la chaîne du polymère, la variation de température entraînant des propriétés mécaniques uniques et des applications potentielles en tant qu’actionneurs mécaniques.
Ionique
EAP ioniques, dans lesquels l’activation est provoquée par le déplacement d’ions à l’intérieur du polymère. Quelques volts seulement sont nécessaires pour l’actionnement, mais le flux ionique implique une puissance électrique plus élevée pour l’actionnement, et de l’énergie est nécessaire pour maintenir l’actionneur dans une position donnée. Des exemples de systèmes EAPS ioniques sont les polymères conducteurs, les composites polymère ionique polymère-métal (IPMC) et les gels sensibles. Un autre exemple est un actionneur de gel Bucky, qui est une couche de polyélectrolyte supportée par un polymère constituée d’un liquide ionique pris en sandwich entre deux couches d’électrodes consistant en un gel de liquide ionique contenant des nanotubes de carbone à paroi simple. Le nom vient de la similitude du gel avec le papier qui peut être fabriqué en filtrant des nanotubes de carbone, ce que l’on appelle le papier mâché.
Fluide électrorhéologique
Les fluides électrorhéologiques modifient la viscosité d’une solution avec l’application d’un champ électrique. Le fluide est une suspension de polymères dans un liquide à faible constante diélectrique. Avec l’application d’un grand champ électrique, la viscosité de la suspension augmente. Les applications potentielles de ces fluides comprennent les amortisseurs, les supports de moteur et les amortisseurs acoustiques.
Composite polymère ionique-métal
Les composites polymère ionique-métal sont constitués d’une fine membrane ionomère sur laquelle sont déposées des électrodes en métal noble. Il contient également des cations pour équilibrer la charge des anions fixés sur le squelette du polymère. Ce sont des actionneurs très actifs qui présentent une très forte déformation sous faible tension appliquée et une faible impédance. Les composites polymère-métal ioniques agissent par attraction électrostatique entre les contre-ions cationiques et la cathode du champ électrique appliqué. La Figure 3 en est une représentation schématique. Ces types de polymères sont les plus prometteurs pour les utilisations biomimétiques, les fibres de collagène étant essentiellement composé de polymères ioniques chargés naturels. Nafion et Flemion sont des composites de polymère polymère ionique couramment utilisés.
Gels sensibles aux stimuli
Les gels sensibles aux stimuli (les hydrogels, lorsque l’agent de gonflement est une solution aqueuse) sont un type particulier de réseaux de polymères gonflables avec un comportement de transition de phase en volume. Ces matériaux changent de manière réversible leur volume, leurs propriétés optiques, mécaniques et autres par de très petites modifications de certains stimuli physiques (par exemple, champ électrique, lumière, température) ou chimiques (concentrations). Le changement de volume de ces matériaux se produit par gonflement / retrait et est basé sur la diffusion. Les gels apportent le plus grand changement de volume de matériaux à l’état solide. Combinés à une excellente compatibilité avec les technologies de micro-fabrication, les hydrogels répondant aux stimuli, en particulier, présentent un intérêt croissant pour les microsystèmes dotés de capteurs et d’actionneurs. Les domaines de recherche et d’application actuels sont les systèmes de capteurs chimiques, la microfluidique et les systèmes d’imagerie multimodaux.
Comparaison des PAE diélectriques et ioniques
Les polymères diélectriques sont capables de maintenir leur déplacement induit lorsqu’ils sont activés sous une tension continue. Cela permet de prendre en compte les polymères diélectriques pour des applications robotiques. Ces types de matériaux ont également une densité d’énergie mécanique élevée et peuvent être utilisés dans l’air sans diminution importante des performances. Cependant, les polymères diélectriques nécessitent des champs d’activation très élevés (> 10 V / µm) proches du niveau de claquage.
L’activation des polymères ioniques, d’autre part, ne nécessite que 1-2 volts. Cependant, ils doivent maintenir l’humidité, bien que certains polymères aient été développés en tant qu’activateurs encapsulés autonomes, ce qui permet leur utilisation dans des environnements secs. Les polymères ioniques ont également un faible couplage électromécanique. Ils sont toutefois idéaux pour les dispositifs bio-mimétiques.
Caractérisation
Bien que les polymères électroactifs puissent être caractérisés de nombreuses façons différentes, nous n’en aborderons ici que trois: la courbe contrainte-déformation, l’analyse thermique mécanique dynamique et l’analyse thermique diélectrique.
Courbe de contrainte-déformation
Les courbes de contrainte de déformation fournissent des informations sur les propriétés mécaniques du polymère, telles que la fragilité, l’élasticité et la limite d’élasticité du polymère. Cela se fait en appliquant une force uniforme au polymère et en mesurant la déformation qui en résulte. Un exemple de cette déformation est illustré à la figure 4. Cette technique est utile pour déterminer le type de matériau (fragile, dur, etc.), mais il s’agit d’une technique destructive car la contrainte est augmentée jusqu’à ce que le polymère se fracture.
Analyse thermique mécanique dynamique (DMTA)
L’analyse mécanique dynamique est une technique non destructive utile pour comprendre le mécanisme de la déformation au niveau moléculaire. Dans le DMTA, une contrainte sinusoïdale est appliquée au polymère et, sur la base de la déformation du polymère, les caractéristiques de module d’élasticité et d’amortissement sont obtenues (en supposant que le polymère soit un oscillateur harmonique amorti). Les matériaux élastiques prennent l’énergie mécanique du stress et la convertissent en énergie potentielle qui peut ensuite être récupérée. Un ressort idéal utilisera toute l’énergie potentielle pour retrouver sa forme d’origine (pas d’amortissement), tandis qu’un liquide utilisera toute l’énergie potentielle pour s’écouler, sans jamais retrouver sa position ou sa forme d’origine (amortissement élevé). Un polymère visco-néestique présentera une combinaison des deux types de comportement.
Analyse thermique diélectrique (DETA)
DETA est similaire à DMTA, mais au lieu d’une force mécanique alternative, un champ électrique alternatif est appliqué. Le champ appliqué peut conduire à la polarisation de l’échantillon et si le polymère contient des groupes qui ont des dipôles permanents (comme dans la Figure 2), ils s’aligneront sur le champ électrique. La permittivité peut être mesurée à partir du changement d’amplitude et résolue en stockage de diélectrique et en composantes de perte. Le champ de déplacement électrique peut également être mesuré en suivant le courant. Une fois le champ supprimé, les dipôles se détendront dans une orientation aléatoire.
Applications
Les matériaux EAP peuvent être facilement fabriqués dans diverses formes en raison de la facilité de traitement de nombreux matériaux polymères, ce qui les rend très polyvalents. Une application potentielle des EAP est qu’ils peuvent potentiellement être intégrés dans des systèmes microélectromécaniques (MEMS) pour produire des actionneurs intelligents.
Muscles artificiels
En tant que direction de recherche pratique la plus prospective, les PAE ont été utilisés dans les muscles artificiels. Leur capacité à imiter le fonctionnement de muscles biologiques à haute ténacité, aux contraintes d’actionnement et à l’amortissement inhérent aux vibrations attire l’attention des scientifiques dans ce domaine.
Affichages tactiles
Au cours des dernières années, des « polymères électro-actifs pour les afficheurs braille rafraîchissants » ont vu le jour pour aider les malvoyants à lire rapidement et à communiquer assistée par ordinateur. Ce concept repose sur l’utilisation d’un actionneur EAP configuré sous forme de matrice. Des rangées d’électrodes sur un côté d’un film EAP et des colonnes sur l’autre activent des éléments individuels dans la matrice. Chaque élément est monté avec un point braille et est abaissé en appliquant une tension sur l’épaisseur de l’élément sélectionné, entraînant une réduction de l’épaisseur locale. Sous le contrôle de l’ordinateur, des points seraient activés pour créer des motifs tactiles de hauts et de bas représentant les informations à lire.
Les impressions visuelles et tactiles d’une surface virtuelle sont affichées sur un écran tactile haute résolution, appelé « peau artificielle » (Fig.6). Ces dispositifs monolithiques consistent en un réseau de milliers de modulateurs multimodaux (pixels d’actionneur) basés sur des hydrogels sensibles aux stimuli. Chaque modulateur est capable de changer individuellement sa transmission, sa hauteur et sa douceur. Outre leur utilisation possible comme écrans graphiques pour les malvoyants, de tels écrans sont intéressants en tant que touches programmables libres des pavés tactiles et des consoles.
Microfluidique
Les matériaux de PAE ont un potentiel énorme pour la microfluidique, par exemple en tant que systèmes de délivrance de médicaments, dispositifs microfluidiques et laboratoires sur puce. Une première technologie de plate-forme microfluidique rapportée dans la littérature est basée sur des gels sensibles aux stimuli. Pour éviter l’électrolyse de l’eau, les dispositifs microfluidiques à base d’hydrogel sont principalement basés sur des polymères sensibles à la température présentant des caractéristiques de température de solution critique inférieure (LCST), contrôlées par une interface électrothermique. Deux types de micropompes sont connus, une micropompe à diffusion et une micropompe à déplacement. Les microvalves à base d’hydrogels sensibles aux stimuli présentent des propriétés intéressantes telles que la tolérance aux particules, l’absence de fuite et une résistance à la pression exceptionnelle. Outre ces composants microfluidiques standard, la plate-forme d’hydrogel fournit également des capteurs chimiques et une nouvelle classe de composants microfluidiques, les transistors chimiques (également appelés vannes chimostatiques). Ces dispositifs régulent le débit d’un liquide si un seuil de concentration de certains produits chimiques est atteint. Les transistors chimiques constituent la base des circuits intégrés microchimiques et fluidiques. Les « CI chimiques » traitent exclusivement des informations chimiques, sont autonomes en énergie, fonctionnent automatiquement et peuvent être intégrés à grande échelle.
Une autre plateforme microfluidique est basée sur des matériaux ionomères. Les pompes fabriquées à partir de ce matériau pourraient offrir un fonctionnement à basse tension (batterie), une signature de bruit extrêmement faible, une efficacité élevée du système et un contrôle très précis du débit.
Les membranes optiques sont une autre technologie pouvant tirer parti des propriétés uniques des actionneurs EAP. En raison de leur faible module, l’impédance mécanique des actionneurs, ils sont parfaitement adaptés aux matériaux de membrane optique courants. En outre, un seul actionneur EAP est capable de générer des déplacements allant de quelques micromètres à plusieurs centimètres. Pour cette raison, ces matériaux peuvent être utilisés pour la correction de forme statique et la suppression de la gigue. Ces actionneurs pourraient également être utilisés pour corriger les aberrations optiques dues aux interférences atmosphériques.
Étant donné que ces matériaux présentent un excellent caractère électroactif, les matériaux EAP montrent un potentiel dans la recherche robotique biomimétique, les capteurs de stress et le domaine de l’acoustique, ce qui rendra les EAP un sujet d’étude plus attrayant dans un avenir proche. Ils ont été utilisés pour divers actionneurs tels que les muscles du visage et des bras, dans des robots humanoïdes.
Directions futures
Le domaine des PAE est loin d’être mûr, ce qui laisse plusieurs problèmes sur lesquels il reste encore à travailler. La performance et la stabilité à long terme du PAE devraient être améliorées en concevant une surface imperméable à l’eau. Cela empêchera l’évaporation de l’eau contenue dans le PAE et réduira également la perte potentielle des contre-ions positifs lorsque le PAE fonctionne en immersion dans un environnement aqueux. La conductivité de surface améliorée doit être explorée à l’aide de méthodes permettant de produire une surface conductrice exempte de défauts. Cela pourrait éventuellement être fait en utilisant un dépôt de vapeur de métal ou d’autres méthodes de dopage. Il peut également être possible d’utiliser des polymères conducteurs pour former une couche conductrice épaisse. Le PAE résistant à la chaleur serait souhaitable pour permettre le fonctionnement à des tensions plus élevées sans endommager la structure interne du PAE en raison de la génération de chaleur dans le composite du PAE. Le développement de PAE dans différentes configurations (fibres et faisceaux de fibres, par exemple) serait également bénéfique pour élargir la gamme de modes de mouvement possibles.