Точка нулевого момента

Точка нулевого момента — это понятие, связанное с динамикой и контролем лобового движения, например, для гуманоидных роботов. В нем указывается точка, в отношении которой динамическая сила реакции при контакте стопы с землей не создает никакого момента в горизонтальном направлении, то есть в точке, где общая сила горизонтальной инерции и силы тяжести равна 0 (ноль). Понятие предполагает, что площадь контакта плоская и имеет достаточно высокое трение, чтобы ноги не скользили.
Вступление
Эта концепция была введена в январе 1968 года Миомиром Вукобратовичем на III Всесоюзном съезде теоретической и прикладной механики в Москве. В следующих работах и статьях, которые были сделаны в период с 1970 по 1972 год, он будет называться нулевой момент и будет распространяться по всему миру.
Точка нулевого момента — очень важная концепция в планировании движения для двуногих роботов. Поскольку у них есть только две точки соприкосновения с полом, и они должны ходить, «бегать» или «прыгать» (в контексте движения), их движение должно быть запланировано относительно динамической устойчивости всего их тела. Это непростая задача, особенно потому, что верхняя часть робота (торса) имеет большую массу и инерцию, чем ноги, которые должны поддерживать и перемещать робота. Это можно сравнить с проблемой балансировки перевернутого маятника.
Траектория ходячего робота запланирована с использованием уравнения углового момента, чтобы гарантировать, что созданные совместные траектории гарантируют динамическую постуральную устойчивость робота, которая обычно количественно определяется расстоянием точки нулевого момента в границах предопределенной области устойчивости. На положение точки нулевого момента влияет связанная масса и инерция торса робота, поскольку его движение обычно требует больших крутящих моментов лодыжки для поддержания удовлетворительной динамической постуральной устойчивости.
Один из подходов к решению этой проблемы заключается в использовании небольших движений стволов для стабилизации положения робота. Тем не менее, разрабатываются некоторые новые методы планирования для определения траекторий связей ног таким образом, что туловище робота естественно управляется, чтобы уменьшить крутящий момент лодыжки, необходимый для компенсации его движения. Если траектория планирования ног связи хорошо преуспела, то точка нулевого момента не выйдет из предопределенной области стабильности, и движение робота станет более плавным, имитируя естественную траекторию.
Вычисление ZMP
Результирующая сила сил инерции и силы тяжести, действующих на двуногий робот, выражается формулой:

где
Момент в любой точке
где
Уравнения Ньютона-Эйлера глобального движения двуногого робота можно записать в виде:
где
Уравнения Ньютона-Эйлера можно переписать как:
так что легче видеть, что у нас есть:
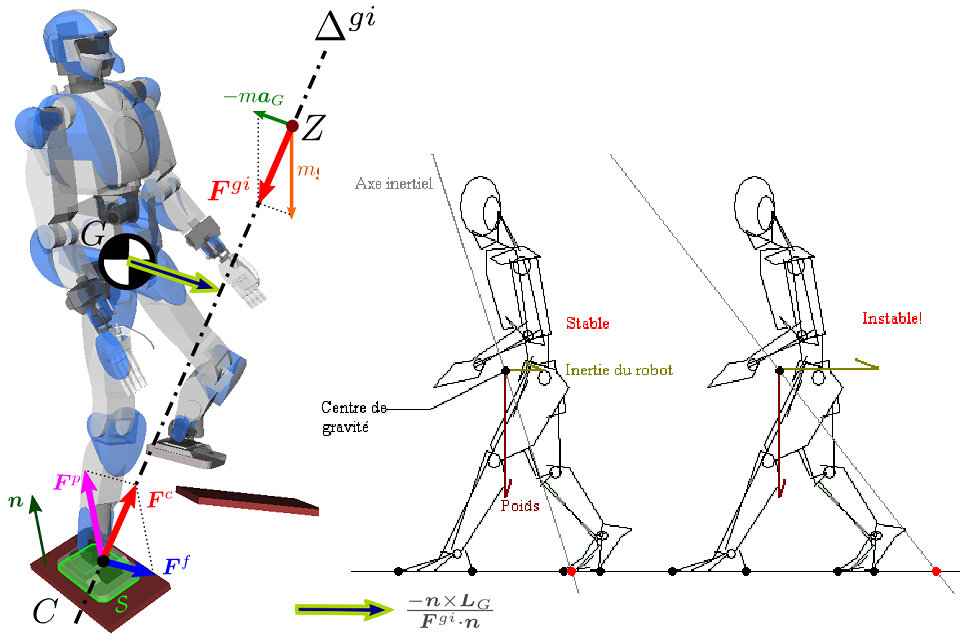
Эти уравнения показывают, что двуногий робот динамически сбалансирован, если силы контакта и силы инерции и силы тяжести строго противоположны.
Если ось
с
где
Из-за противостояния сил тяжести и силы инерции и упомянутых выше контактных сил {\ displaystyle Z}
где
История концепции
Понятие ZMP впервые было представлено Миомиром Вукобратовичем на III съезде Союза теоретической и прикладной механики, состоявшемся в Москве в январе 1968 года. В опубликованных работах появился термин «точка нулевого момента». в последующие годы.
Интерес к ZMP взлетел в 1990-х годах, когда роботисты успешно применили его для управления законами для двуногих ходов. Фундаментальной моделью, разрешающей эти разработки, является перевернутый маятник: верхняя часть тела с массой больше, чем ноги, ходьба состоит в первом приближении к движению перевернутого маятника, т. Е. К соединенной массе к подвижной базе посредством стержень нулевой массы (модель «CART»).Масса в вопросе представляет собой центр тяжести робота, стержень его опорной ноги, а мобильная базовая точка есть не что иное, чем ТНМ. Эта модель была успешно применена к роботам HRP-2 1 и HRP-4C.], Где центр тяжести остается на постоянной высоте.
Связь с центром давления
Центр давления представляет собой динамическую точечную характеристику контакта. В отличие от ZMP, который определяется в соответствии со всеми ускорениями робота, КС является локальной величиной, определяемой силами, действующими на поверхность контакта. Однако, когда есть только один контакт, или робот идет по горизонтальной земле, КС и ZMP совпадают.
Рисунок справа представляет центр тяжести
Специальный случай плоской площадки
Пока контакт с поверхностью не разрушается, центр давления обязательно находится внутри контактной поверхности между роботом и окружающей средой. Когда две ноги робота находятся в контакте с одной и той же поверхностью (землей), эта поверхность левитации
Критерий без наклона: во время работы без наклона ZMP расположен в пределах поверхности подъема, определяемой как выпуклый корпус опоры.
Этот критерий чаще всего используется для ходьбы гуманоидных роботов на плоской земле.
Приложения
Нулевая точка момента была предложена в качестве показателя, который можно использовать для оценки стабильности против опрокидывания роботов, таких как iRobot PackBot, при навигации по рампам и препятствиям.