вычисления

Роботизированная парадигма
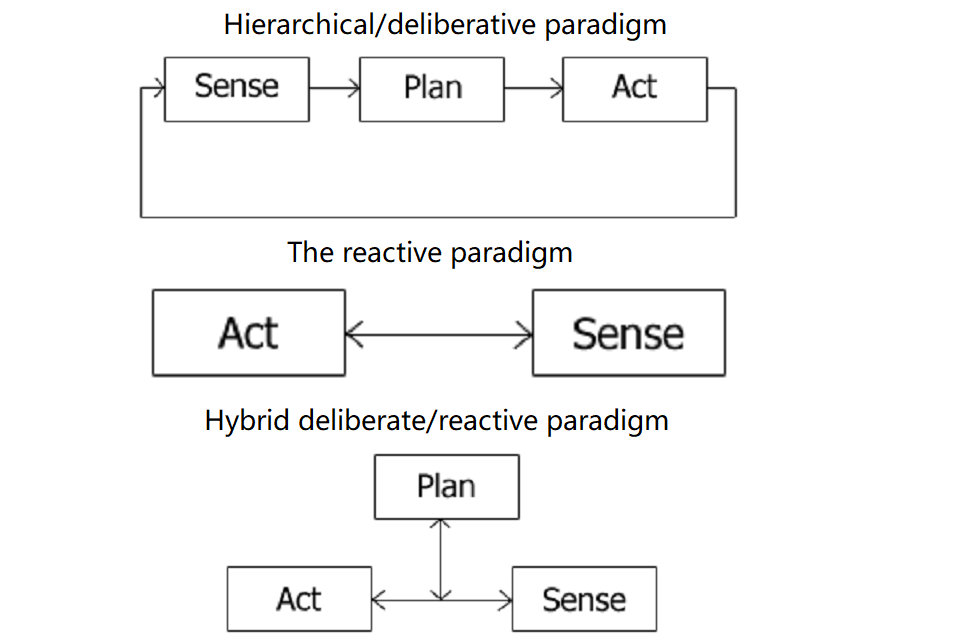
В робототехнике роботизированная парадигма представляет собой ментальную модель того, как работает робот. Роботическую парадигму можно описать в отношениях между тремя…
Реактивное планирование
В искусственном интеллекте реактивное планирование обозначает группу методов отбора действий автономными агентами. Эти методы отличаются от классического планирования в двух…
Робототехника развития
Развивающая робототехника (DevRob), иногда называемая эпигенетической робототехникой, представляет собой научную область, которая направлена на изучение механизмов, архитектур и ограничений развития,…
Адаптируемая робототехника
Адаптируемая робототехника обычно базируется на наборах разработчика роботов. Эта технология отличается от статической автоматизации благодаря ее способности адаптироваться к изменяющимся…
Программное обеспечение Robot
Программное обеспечение Robot - это набор закодированных команд или инструкций, которые указывают механическое устройство и электронную систему, известные вместе как…
Робототехника Hexapod
Робот гексаподов - это механический автомобиль, который ходит на шести ногах. Поскольку робот может быть стабильно стабильным на трех или…
Легкий робот
Легкие роботы - это тип мобильного робота, который использует механические конечности для движения. Они более универсальны, чем колесные роботы, и…
Автономное подводное транспортное средство
Автономное подводное транспортное средство (AUV) - это робот, который путешествует под водой, не требуя ввода от оператора. AUV составляют часть…
Рой-роботы
Рой-робототехника - это подход к координации нескольких роботов как системы, состоящей из большого числа в основном простых физических роботов. Предполагается,…
Роботизированный космический аппарат
Роботизированный космический корабль - это беспилотный космический корабль, обычно под контролем телероботов. Роботизированный космический аппарат, предназначенный для проведения научных исследований,…