自律型水中車両(AUV)は、オペレータからの入力を必要とせずに水中を移動するロボットです。 AUVは、非自律遠隔操作型水中車両(ROV)を含む分類である、無人水中車両として知られている海底システムの大部分を構成しています。 軍事用途では、AUVは無人海底車両(UUV)と呼ばれることが多い。 水中のグライダーはAUVのサブクラスです。
歴史
最初のAUVは、スタン・マーフィー、ボブ・フランソワ、そして後にテリー・エワートによって1957年にワシントン大学のアプライド・フィジックス・ラボラトリーで開発されました。 拡散、音響伝送、潜水艦の後流を研究するために、「特殊目的の水中研究用車両」(SPURV)が使われました。
他の初期のAUVは、1970年代にマサチューセッツ工科大学で開発されました。 これらの1つは、MITのHart Nautical Galleryに展示されています。 同時に、AUVもソビエト連邦で開発されました(これは後で一般には知られていませんでしたが)。
アプリケーション
比較的最近まで、AUVは、利用可能な技術によって決まる限られた数の作業のために使用されてきた。 より高度な処理能力と高歩留まりの電源装置の開発により、AUVは役割と任務が絶え間なく進化するにつれてますます多くのタスクに使用されています。
商業の
石油・ガス業界は、海底インフラの構築を開始する前にAUVを使用して海底の詳細な地図を作成しています。 パイプラインとサブ海の補完は、環境を最小限に抑えながら最もコスト効率の高い方法でインストールすることができます。 AUVは、調査会社が伝統的な水深測量調査の効果があまり高くないか、コストがかかり過ぎる地域の正確な調査を実施することを可能にします。 また、パイプライン検査を含むポストレイパイプ調査が可能になりました。 水中人工構造物のパイプライン検査および検査のためのAUVの使用は、より一般的になってきている。
研究
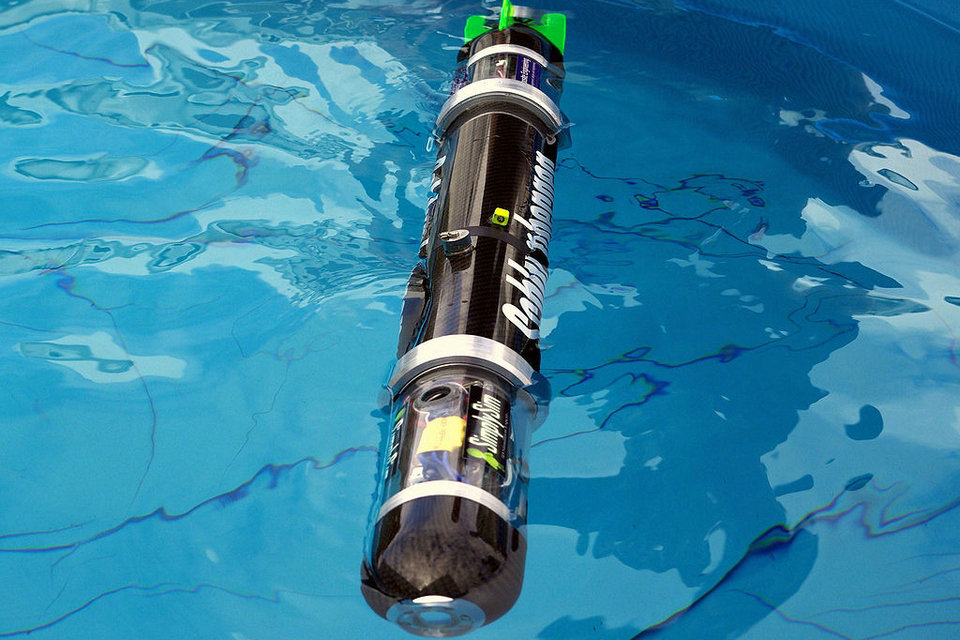
サウスフロリダ大学の研究者は、太陽光発電の「ツイート」AUV(SAUV)のTavros02を、
科学者は、湖、海、海底を調べるためにAUVを使用しています。 種々の要素または化合物の濃度、光の吸収または反射、および微視的な寿命の存在を測定するために、様々なセンサをAUVに取り付けることができる。 例には、導電率 – 温度 – 深さセンサー(CTD)、蛍光光度計、およびpHセンサーが含まれる。 さらに、AUVは、特定の場所にカスタマイズされたセンサパッケージを提供するために牽引車両として構成することができます。
趣味
多くのロボット工学者が趣味としてAUVを構築しています。 これらの自家製AUVが目的を達成しながら互いに競争することを可能にするいくつかの競技が存在する。 彼らの商業兄弟のように、これらのAUVにはカメラ、ライト、またはソナーがついています。 限られたリソースと経験不足の結果として、愛好家のAUVは、操作上の深さ、耐久性、または洗練さについて商用モデルと競合することはほとんどありません。 最後に、これらの趣味のAUVは通常、プールや湖のベッドでほとんどの時間運営されている外来ではありません。 簡単なAUVは、マイクロコントローラ、PVC圧力ハウジング、自動ドアロックアクチュエータ、シリンジ、およびDPDTリレーから構成できます。 コンテスト参加者の中には、オープンソースデザインを作成するものもあります。
違法ドラッグトラフィック
GPSナビゲーションによって目的地まで自律的に移動する潜水艦は、違法麻薬密売人によって作られています。
エアクラッシュ調査
AUV ABYSSなどの自律型水中乗り物は、Air France Flight 447などの紛失した航空機の残骸を発見するために使用されており、Bluefin-21 AUVはMalaysia Airlines Flight 370の検索に使用されています。
軍用アプリケーション
米海軍無人海底車両(UUV)マスタープランは、以下のUUVのミッションを特定した。
インテリジェンス、サーベイランス、偵察
鉱山の対策
対潜水艦戦
検査/識別
海洋学
通信/ナビゲーションネットワークノード
ペイロード配信
情報操作
タイムクリティカルなストライキ
海軍マスタープランはすべてのUUVを4つのクラスに分けました:
人間可搬車クラス:25-100ポンドの変位; 10〜20時間耐久性; 手動で小さな水上工事から発射された(すなわち、Mk 18 Mod 1 Swordfish UUV)
軽量車クラス:最大500ポンドの排気量、20〜40時間の耐久性。 発進/回収システムを使用してRHIBから、または地上船(すなわち、Mk 18 Mod 2 Kingfish UUV)からのクレーンによって発射され、
重量級車両クラス:最大3000ポンドの排気量、40〜80時間の耐久性、潜水艦からの起動
大型車両クラス:最大10トンの移動。 地上船と潜水艦から発射された
車両の設計
過去数十年に渡って何百もの異なるAUVが設計されてきましたが、少数の企業しか車両を販売していませんでした。 Kongsberg Maritime、Hydroid(現在はKongsberg Maritimeの100%子会社)、Bluefin Robotics、Teledyne Gavia(以前はHafmyndとして知られていた)、International Submarine Engineering(ISE)Ltd、Atlasなど、AUVを国際市場で販売する会社は10社ほどですElektronik、およびOceanScan。
車両の大きさは、人間の可搬型軽量AUVから長さ10メートル以上の大口径車までの範囲である。 大型車両は、耐久性およびセンサペイロード能力の面で利点を有する。 より小型の車両は、物流がより低いことから大幅に利益を得る(例えば、船舶の支持面積、発進および回収システム)。
一部のメーカーは、BluefinとKongsbergを含む国内政府のスポンサーシップの恩恵を受けています。 市場は、科学的(大学と研究機関を含む)、商業的なオフショア(石油とガスなど)と軍事的適用(鉱害対策、戦闘空間の準備)の3つの領域に効果的に分けられる。 これらの役割の大部分は同様の設計を採用し、クルーズ(魚雷型)モードで動作する。 彼らは、1と4ノットの間の速度で計画されたルートに従っている間にデータを収集します。
商業的に入手可能なAUVには、米国のWoods Hole Oceanographic Institutionによって最初に開発され、現在Hydroid、Inc.(Kongsberg Maritimeの完全子会社)によって商業的に製造された小型REMUS 100 AUVなどの様々な設計が含まれる。 Kongsberg MaritimeとNorwegian Defense Research Establishmentが開発した大型のHUGIN 1000と3000 AUVです。 (300と530 mm)車と国際潜水艦エンジニアリング株式会社のBluefin RoboticsのほとんどのAUVは伝統的な魚雷形状に従っています。これは、サイズ、使用可能容積、流体力学的効率、取り扱いの容易さ。 モジュラー設計を利用している車両がいくつかあり、オペレータがコンポーネントを簡単に変更できるようになっています。
市場は進化しており、デザインは純粋に発達的ではなく商業的要件に従っています。 今後の設計には、(主にオフショア・エネルギー・アプリケーションのための)点検および光介入のためのホバー可能なAUV、およびミッション・プロファイルの一部として役割間を切り替えるハイブリッドAUV / ROV設計が含まれる。 ここでもまた、市場は資金需要と、費用と高価な船の時間を節約することを目的としています。
現在、ほとんどのAUVは監督されていない任務を実行することができますが、ほとんどのオペレータは、投資を注意深く監視するために音響テレメトリシステムの範囲内にとどまっています。 これは必ずしも可能ではありません。 例えば、カナダは、最近、海洋法条約第76条に基づく彼らの主張を支持するために、北極の氷の下の海底を調査するために、2つのAUV(ISEエクスプローラ)の配達を取った。 また、水中グライダーのような超低電力の長距離の変形物は、海岸沿いおよび海洋の海域で数週間または数ヶ月間無人で操業することができ、拾い上げる前に定期的に衛星から海岸にデータを中継します。
2008年現在、自然界にあるデザインを模倣した新しいクラスのAUVが開発されています。 大部分は実験段階にありますが、これらのバイオミメティック(またはバイオニック)ビークルは、自然で成功したデザインをコピーすることによって推進力と操縦性においてより高い効率を達成することができます。 そのような乗り物は、FestoのAquaJelly(AUV)とEvoLogicsのBOSS Manta Rayです。
センサ
AUVは、自律的にナビゲートし、海洋の特徴をマッピングするためのセンサーを搭載しています。 典型的なセンサには、コンパス、深度センサ、サイドスキャンおよび他のソナー、磁力計、サーミスタおよび導電性プローブが含まれる。 いくつかのAUVには、蛍光光度計(クロロフィルセンサーとしても知られる)、濁度センサー、pHを測定するセンサー、溶存酸素量などの生物センサーが装備されています。
2006年9月のカリフォルニアのモンテレー湾でのデモンストレーションでは、5インチ(530mm)直径のAUVが6ノット(11km / h)の巡航速度を維持しながら400フィート(120m)のハイドロホンアレイを牽引できることが示されました。
ナビゲーション
電波は非常に遠くまで浸透することはできないので、AUVがダイビングするとすぐにGPS信号が失われます。 したがって、AUVが水中をナビゲートするための標準的な方法は、推測航法によるものです。 しかし、航法は水中音響測位システムを使用することによって改善することができる。 海底の配備ベースライントランスポンダのネット内で動作するとき、これはLBLナビゲーションとして知られています。 支持船などの地表基準が利用可能な場合、超海上ベースライン(USBL)またはショートベースライン(SBL)測位を使用して、海洋船が既知の(GPS)音響範囲とベアリングの測定値によって その位置の推定を改善し、推測航法(時間の経過とともに成長する)の誤差を減らすために、AUVは独自のGPSフィッティングを表面化して実行することもできます。 位置の修正と正確な操縦の間で、AUVに乗っている慣性航法システムは、AUV位置、加速度、および速度を推測航法で計算する。 慣性測定ユニットからのデータを使用して推定を行うことができ、海面/湖底の移動速度を測定するドップラー速度ログ(DVL)を追加することによって改善することができます。 一般的に、圧力センサは垂直位置(車両の深さ)を測定するが、DVL測定から深さおよび高度を得ることもできる。 これらの観測値はフィルタリングされ、最終的なナビゲーションソリューションが決定されます。
推進
AUVにはいくつかの推進技術があります。 その中には、ブラシレスまたはブラシレスの電動モーター、ギアボックス、リップシール、ノズルで囲まれたプロペラなどがあります。 AUV構造に埋め込まれたこれらの部品はすべて推進に関与しています。 他の車両は、スラスタユニットを使用してモジュール性を維持する。 スラスタには、必要に応じて、プロペラの衝突保護用のノズルを装備してもよいし、騒音の発生を低減するためのノズルを備えていてもよいし、効率を最高レベルに維持するための直接駆動スラスタを備えていてもよい。 高度なAUVスラスタには、ミッション中にシールの1つが故障しても、ロボットの適切なシールを保証するための重複シャフトシールシステムがあります。
水中のグライダーは自分自身を直接推進しません。 彼らの浮力とトリムを変えることによって、彼らは繰り返し沈下し、上昇する。 翼型の「翼」は、この上下運動を前進運動に変換する。 浮力の変化は、典型的には、水を取り入れたり押し出すことができるポンプの使用によって行われる。 車両のピッチは、車両の質量中心を変更することによって制御することができる。 Slocumグライダーの場合、これはスクリューに取り付けられたバッテリーを動かすことで内部的に行われます。 低スピードと低消費電力のエレクトロニクスにより、トリム・ステートをサイクルするのに必要なエネルギーは通常のAUVよりもはるかに少なく、グライダーは数ヶ月の耐久性と大洋横断の範囲を持つことができます。
力
今日使用されているほとんどのAUVは、充電式電池(リチウムイオン、リチウムポリマー、ニッケル金属水素化物など)によって駆動され、何らかの形のバッテリ管理システムで実装されています。 一部の車両では、おそらく2回の耐久性を提供する1次電池が使用されます。 より大型の車両のいくつかはアルミニウムベースのセミ – 燃料電池によって駆動されるが、これらは実質的なメンテナンスを必要とし、高価な補充を必要とし、安全に処理しなければならない廃棄物を生成する。 新たな傾向として、異なるバッテリおよび電力システムをスーパーキャパシタと組み合わせることが挙げられる。