
الروبوتات الأرجل هي نوع من الروبوتات المتنقلة التي تستخدم أطرافًا ميكانيكية للحركة. فهي أكثر تنوعًا من الروبوتات ذات العجلات ويمكنها عبور العديد من التضاريس المختلفة ، على الرغم من أن هذه المزايا تتطلب زيادة التعقيد واستهلاك الطاقة. غالباً ما تقلد الروبوتات ذات الأرجل الحيوانات الساقين ، مثل البشر أو الحشرات ، في مثال التقليد الحيوي.
أنواع
يمكن تصنيف روبوتات الرجل بواسطة عدد من الأطراف التي يستخدمونها ، والذي يحدد gaits المتاحة. تميل الروبوتات ذات الأرجل المتعددة إلى أن تكون أكثر استقرارًا ، في حين أن عددًا أقل من الساقين يفسح المجال لمزيد من القدرة على المناورة.
عديم الرجل
تستخدم روبوتات العصا أحادية الساق أو البوجو حركة القفز للتنقل. في الثمانينيات من القرن العشرين ، طورت جامعة كارنيجي ميلون روبوتًا ذا ساق واحد لدراسة التوازن. بيركلي في SALTO هو مثال آخر.
ذو قائمتين
الروبوتات ثنائية القدمين أو الرجلان تدليان بحركة ثنائية القدم. على هذا النحو ، يواجهون مشكلتين أساسيتين:
السيطرة على الاستقرار ، والذي يشير إلى توازن الروبوت ، و
التحكم في الحركة ، والذي يشير إلى قدرة الروبوت على التحرك.
يعتبر التحكم في الثبات أمرًا صعبًا على وجه الخصوص بالنسبة للأنظمة ثنائية الأقدام ، والتي يجب أن تحافظ على التوازن في الاتجاه إلى الأمام والخلف حتى عند الراحة. تعمل بعض الروبوتات ، وخاصة الألعاب ، على حل هذه المشكلة بقدمين كبيرتين ، مما يوفر مزيدًا من الثبات مع تقليل القدرة على الحركة. وبدلاً من ذلك ، تستخدم الأنظمة الأكثر تقدمًا أجهزة استشعار مثل مقاييس السرعة أو الجيروسكوبات لتقديم ملاحظات ديناميكية بطريقة تقارب توازن الإنسان. وتستخدم هذه المحسات أيضا للتحكم في الحركة والمشي. تعقيد هذه المهام يفسح المجال للتعلم الآلي.
يمكن تقريب حركة البُيْيبد البسيطة بواسطة مضلع متدحرج حيث يتطابق طول كل جانب مع خطوة واحدة. عندما ينمو طول الخطوة ، يزداد عدد الأضلاع ، وتقترب الحركة من الدائرة. هذا يربط الحركة ثنائية البكر بحركة بعجلة كحد من طول الخطوة.
الروبوتات ذات الرجلان تشمل:
بوسطن ديناميكس أطلس
لعبة الروبوتات مثل QRIO و ASIMO.
الروبوت Valkyrie ناسا ، وتهدف إلى مساعدة البشر على سطح المريخ.
لعب بينغ بونغ لعب روبوت توبو.
أربعة أرجل
رباعي الأرجل رباعي الأرجل أو رباعي الأرجل يحمل حركة رباعي الأرجل. أنها تستفيد من زيادة الاستقرار على الروبوتات ذات القدمين ، وخصوصا أثناء الحركة. عند السرعات البطيئة ، قد يتحرك الروبوت رباعي الأرجل في ساق واحدة فقط في كل مرة ، مما يضمن استقرار حامل ثلاثي القوائم. كما تستفيد الروبوتات ذات الأربعة أرجل من مركز ثقل أقل من الأنظمة ذات الرأسين.
أربعة الروبوتات تدب على ما يلي:
سلسلة TITAN ، التي تم تطويرها منذ 1980s بواسطة مختبر Hirose-Yoneda.
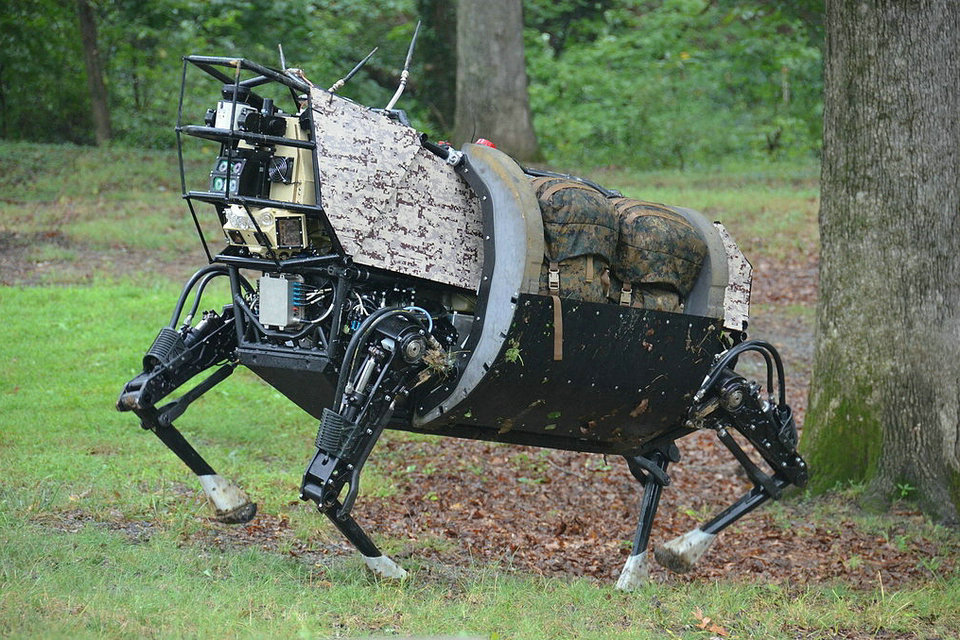
وقد تم تطوير BigDog المستقرة ديناميكيًا في عام 2005 من قبل Boston Dynamics ومعمل الدفع النفاث التابع لناسا ومحطة Concord Field في جامعة هارفارد.
خليفة BigDog ، و LS3.
ستة أرجل
فالروبوتات ذات الستة أرجل ، أو الهيكسابود ، تحفزها الرغبة في تحقيق استقرار أكبر من الروبوتات ثنائية الأقدام أو رباعية الأقدام. غالباً ما تحاكي تصميماتها النهائية آليات الحشرات ، ويمكن تصنيفها على نحو مشابه. وتشمل هذه:
مشية الموجة: أبطأ المشي ، حيث تتحرك أزواج من الأرجل في “موجة” من الخلف إلى الأمام.
مشية ثلاثية القوائم: خطوة أسرع قليلاً ، تتحرك فيها ثلاث أرجل دفعة واحدة. توفر الأرجل الثلاثة المتبقية ترايبود مستقر للروبوت.
الروبوتات ستة أرجل ما يلي:
Odex ، هيكسابود بحجم 375 رطل تم تطويره بواسطة Odetics في ثمانينات القرن العشرين. تميزت Odex بأجهزتها المحمولة التي كانت تتحكم في كل ساق.
تم تطوير جنكيز ، وهو واحد من أوائل الروبوتات ذات الستة أرجل ذاتية الحكم ، في معهد ماساتشوستس للتكنولوجيا من قبل رودني بروكس في الثمانينيات.
سلسلة اللعب الحديثة ، Hexbug.
ثمانية أرجل
مستوحاة الروبوتات ثمانية أرجل أرجل من العناكب وغيرها من العناكب ، فضلا عن بعض المشاة تحت الماء. وهي توفر أقصى قدر من الاستقرار ، مما مكن من تحقيق بعض النجاحات المبكرة في استخدام الروبوتات المدببة.
الروبوتات ثمانية أرجل ما يلي:
دانتي ، وهو مشروع من جامعة كارنيجي ميلون تم تصميمه لاستكشاف جبل إيربوس.
T8X ، وهو روبوت متوفر تجاريا تم تصميمه لمحاكاة مظهر وحركات العنكبوت.
الهجينة
تستخدم بعض الروبوتات مجموعة من الأرجل والعجلات. يمنح هذا الجهاز سرعة وكفاءة الطاقة للتنقل بعجلات بالإضافة إلى إمكانية التنقل في التنقل بأرجل. يعتبر مقبض بوسطن ديناميكس ، وهو روبوت ذو قدمين مع عجلات على ساقيه ، مثالاً على ذلك.
سلوك المشي
المشي ثابت
المشي الثابت هو عندما يكون مركز ثقل الإنسان الآلي فوق القدمين في جميع الأوقات ، بحيث لا يمكن أن يسقط دون عمل قوة خارجية.
المشي الديناميكي والجري
المشي الديناميكي هو عندما يكون مركز ثقل الروبوت أيضاً خارج منطقة القدمين دون سقوط الروبوت. في الواقع ، يمكن للمرء أن يتحدث عن “سقوط خاضع للرقابة” ، حيث يسقط الروبوت في توقف مفاجئ لحركته.
المشي الديناميكي هو عندما تكون الحركة ضرورية للحفاظ على سرعة النتائج في لحظة لا يلمس فيها أي رجل من الروبوت الأرض.
الروبوتات المحمول ثابت
يتكون الروبوت المشي الكلاسيكي من المحركات وأجهزة الاستشعار والتحكم في الكمبيوتر. عادة ما يتم تحريك “الأرجل” بواسطة محركات مؤازرة بحيث يتم التخلص من برنامج حركة محدد سلفا.
رجلين المشي ثابتة
يتحرك الروبوت ASIMO مع سرعة قصوى تبلغ 6 كم / ساعة ، مع حجم 1.30 متر ووزن 52 كجم ويتطلب الكثير من الطاقة الكهربائية. قدرته الخاصة هي أنه يستطيع تسلق السلالم.
روبوت المشي ستة أرجل
تشكل الإنشاءات ذات الستة أرجل أساسًا مثاليًا لروبوتات المشي الثابتة بشكل ثابت. وهي بالتالي مناسبة للحركة على التضاريس غير المستوية. هناك نوعان من gaits (تسلسل حركات الساق):
ترايبود بالطبع
انتقال Tetrapod
يشتمل الحامل ثلاثي القوائم على ثلاثة أرجل على الأرض في أي وقت (مثال: حشرة عصا هندية ، مع 3 وضعية و 3 أرجل متأرجحة).
تحتوي مشية رباعي الأرجل على أربعة أرجل على الأرض (4 أرجل ، أرجلتان متأرجحتان).
في حالة الجراميقات ذات ستة أرجل متعامدة ، يتم أيضًا إجراء تمايز وفقًا لمبدأ حركة الساقين بعيدًا عن تسلسل حركات الساق:
المتابعون (اتبع القائد) (على سبيل المثال ، الحامل ثلاثي القوائم ، والعتاد رباعي الأرجل)
مشاية دائرية
عداء على شبكة الإنترنت (النسيج ووكر)
المخلوقات ذات الستة أرجل تعمل كمتتبعين. يتبع أحد الساقين (بأي ترتيب) الآخر. يمكن للآلات القيام بالمزيد. في العداء الدائري ، يكون للساقين الثلاثة من الجانب الأيمن محور دوار مشترك – مثل يد الساعة (يقابل الساقين اليسرى). الساق المتأخرة تتأرجح أمام الساق الأول. ولكن كيف هي المحطة الأخيرة لتمرير الساقين الآخرين؟ ببساطة يتأرجح تحت البطن (منصة الروبوت).
عداء على شبكة الإنترنت يؤدي أيضا حركة مستحيلة بيولوجيا. في عداء الويب ، تجلس جميع الأرجل الستة على محور عمودي عام في وسط المنصة. كل ساق يمكن أن يهيم تماما حول الجسم كله (حركة تلسكوبية أفقي يجعل من الممكن). تتحرك الأرجل من موضعها الأمامي إلى موضعها الأمامي بالجري حول الأرجل الأخرى في الخارج.
عند المشي على التضاريس غير المستوية ، من الضروري أن يجد الروبوت نقطة لمس آمنة داخل حجم خطه (منطقة اختيار القدم) دون الحاجة إلى الابتعاد عن اتجاه العنوان الرئيسي.
ديناميكية السير على الأقدام
المتسابقين الديناميكي السلبي
تستند روبوتات التشغيل التي يمكن أن تتحرك بدون مصدر للطاقة على لعبة اخترعت قبل 150 عامًا. كان لا بد من إطلاقها ومن ثم يمكن أن تنحدر منحدر صغير وحده. للقيام بذلك ، لعبة الصخور من اليمين إلى اليسار وتقلب الساق بشكل مستقيم إلى الأمام قليلا. ثم تقوم بالصخور من اليسار إلى اليمين وتتأرجح الساق الأخرى للأمام.
مع هذا البناء ، يمكن للعبة أن تتحرك بالطاقة بكفاءة وتكون بمثابة نموذج انطلاق لروبوتات التشغيل المتقدمة تقنياً. في الثمانينيات ، استخدم تاد ماكجير مبدأ البندول لتثبيت الحركات ، والذي تحقق في هذه اللعبة. لم يعد نظام التحكم المعقد والبطيء في جهاز كمبيوتر مجرور يجب أن يجلب الروبوت للعمل ، ولكن يجب على بنية الجهاز العضلي الهيكلي تحقيق الاستقرار في تشغيل الروبوت دون اتخاذ أي إجراء إضافي. إذا تم استكمال بناء لعبة بسيطة مع “الورك” أو “القدمين المنقولة” ، فإن مثل هذه الروبوتات المشي تحتاج فقط إلى الطاقة عند تسريع الجماهير المتحركة وليس كما في الروبوتات السابقة أيضا عند الكبح.