在机器人技术中,机器人范式(Robotic paradigm)是机器人如何运作的心理模型。 机器人范式可以通过机器人的三个基本原理之间的关系来描述:感知计划法。 它还可以通过如何通过系统处理和分发传感数据以及做出决策来描述。
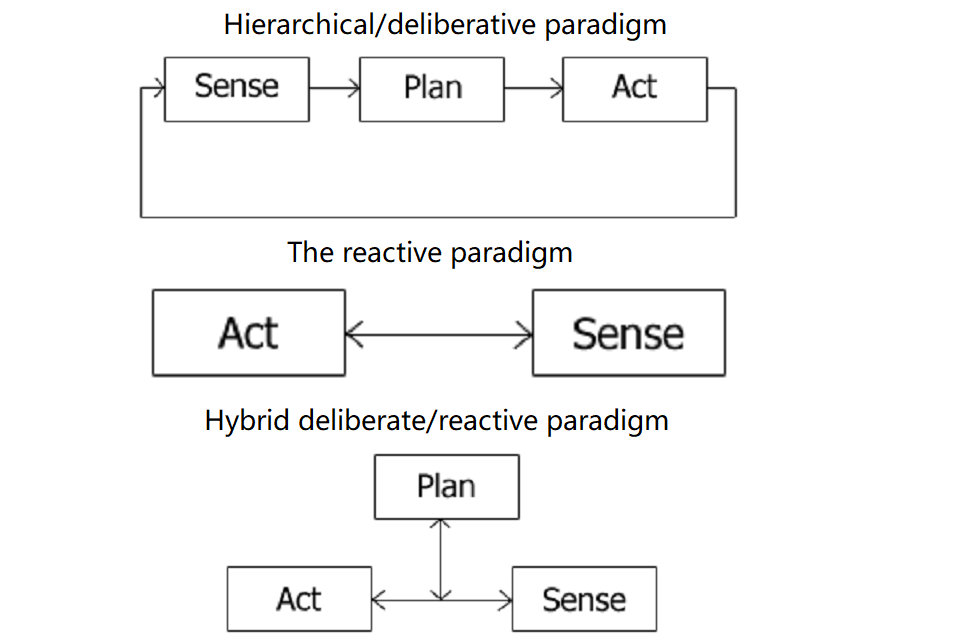
分层/协商范式
机器人以自上而下的方式运作,重视规划。
机器人感知世界,计划下一步行动,行动; 在每一步中,机器人明确地计划下一步行动。
所有传感数据都倾向于收集到一个全球世界模型中。
反应范式
理性行为的组织形式。
机器人有多个Sense-Act联轴器实例。
这些耦合是并发过程,称为行为,它采用本地传感数据并计算出与其他过程无关的最佳动作。
机器人将完成各种行为。
混合故意/反应范式
机器人首先计划(审议)如何最好地将任务分解为子任务(也称为“任务计划”),然后是完成每个子任务的合适行为。
然后行为按照Reactive范例开始执行。
传感组织也是Hierarchical和Reactive风格的混合体; 传感器数据被路由到需要该传感器的每个行为,但也可供规划者用于构建面向任务的全球世界模型。