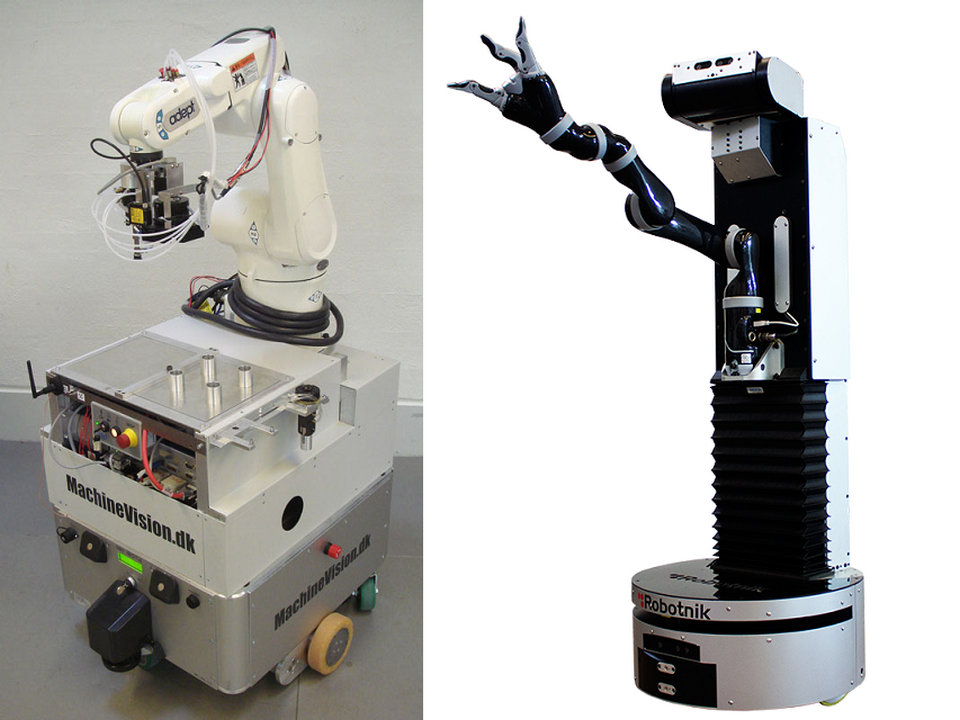
移动机械臂(Mobile manipulator)现在是一个广泛的术语,指的是由安装在移动平台上的机器人操纵臂构建的机器人系统。这种系统结合了移动平台和机器人操纵臂的优点并减少了它们的缺点。 例如,移动平台延伸臂的工作空间,而臂提供若干操作功能。
描述
移动操纵系统提供移动平台提供的移动性和操纵器提供的灵活性的双重优势。 移动平台为操纵器提供无限的工作空间。 移动平台的额外自由度也为用户提供了更多选择。 然而,由于其执行的许多自由度和非结构化环境,这种系统的操作具有挑战性。
一般系统组成:
移动平台
机器人机械手
视力
工装
动机
目前,移动操作是开发和研究环境中主要关注的主题,移动操纵器(自主或远程操作)被用于许多领域,例如太空探索,军事行动,家庭护理和医疗保健。 然而,在工业领域中,移动机械手的实施受到限制,尽管存在对智能和灵活自动化的需求。 此外,必要的技术实体(移动平台,机器人操纵器,视觉和工具)在很大程度上是可用的现成组件。
其原因在于制造业传统上采取行动,因此不愿意通过实施新技术来承担风险。 此外,在工业移动操作领域,关注的焦点一直是各个技术的优化,特别是机器人操纵器和工具,而集成,使用和应用却被忽略了。 这意味着在生产环境中很少有移动机器人的实施报告 – 例如和。
组件
移动机器人平台
作为移动基础,使用经典的无人驾驶运输系统和移动机器人。 移动机器人的使用具有以下优点:它可以在房间内自由地和自主地导航,因此在出现问题时可以操纵机器人(目标不可及,不能通过运动操纵当前位置,改变部件的位置)待机加工等)可直接支撑而不是仅将其运输到固定位置。 平台的可操作性非常重要。 与FTS相比,移动机器人也可以随时接近动态分配的位置。 然而,经典的差动运动学,特别是在工作站附近,达到极限,机器人只能通过或多或少的复杂机动来移动。 用途因此,全向驱动器正变得越来越流行。
存储选项
如果移动操纵器也要有效地运输物体,则必须配备合适的存储设施。 通过适当的设计,这些也可以用于允许更换手柄,而不使用第二臂。 (例如,在关闭之前从盒子中拉出的啤酒瓶必须先停放并夹在身体上才能倒入)。 更大的存储选项使得机器人的工作原则上更有效,但也使得更难以导航车辆。
机械臂
这可以是工业机器人和专门开发的机器人手臂。 现在市面上有一系列小巧轻便的机器人手臂,自行开发的手臂使用量大幅下降。 (参见:柔性机械臂)
爪
必须选择末端执行器以适合要操作的项目。 具有多个移动手指的拟人化夹具越来越多,主要用于研究。
图像处理
当机器人要在工作环境中操纵零件时,几乎总是需要图像处理系统。 如果仅执行固定的臂运动,则必须至少确定并且考虑在训练期间使用的当前和平台位置之间的偏移。 为了接管人类工作人员的任务,机器人还必须处理或多或少的无序部件(也称为箱内手柄)或可变存储位置。
协调控制
移动机器人和机器人手臂的各个控件已经使用了几十年并且发展良好。 然而,当组合两个系统时,会出现大量可能的错误和问题情况,这使得必须添加额外的协调控制。 最重要的是,如果无法执行有序操作,则应该独立找到解决方案,但是可以从另一个姿势执行此操作。 将整个系统控制为封闭的运动链是有帮助的,由于高冗余度,在实施中极难实现。
保安系统
原则上,可以使用用于固定操纵臂或普通自动驾驶车辆的安全装置,也用于移动操纵器。 然而,当移动操纵器与人或至少其他车辆共享工作区时,安全系统受到全新且非常苛刻的要求,因为出现许多可能的危险情况。
的优点和缺点
当将机器人移动平台与机器人臂结合时,由此产生的优点和缺点大于它们各自部件的总和。
好处:
功能范围和可能的应用程序是跨越式的。
整个机器人系统变得更加独立于支撑系统(装载和卸载站,材料处理设备,传输设备……),并且因此至少在理论上可以变得更便宜。
移动操纵器还可以使以前只能由人类执行的更复杂的身体活动自动化,并且经常由于锻炼而导致健康问题。
整个系统可以更灵活地对不准确性和偏差作出反应,例如当物体不能直接接近时通过跟踪臂的基部。
坏处:
由于两个组件的要求,这些组件经常相互干扰:
手臂需要一个大的稳定基座才能有效工作,但平台应该小而轻,以便有效地导航。
平台的循环时间越短,其驱动的速度越快,达到的目标位置就越不准确。 臂的起始位置越不准确,但臂的起始位置已知,更长的是由于所需的校正其周期时间。
为了延长电池供电平台的使用寿命,应尽量减少总重量和功耗。 然而,机器人手臂更有效地工作,它组合的功能越多(因此通常也是附加组件)。
事实上,手臂的工作环境在不断变化,许多以前使用的辅助结构(相对于臂定义的端部位置的零件供应,组件的不可更改的转移位置,定义的照明等)不再或仅仅非常难以使用。
此外,许多移动操纵器不够灵活,无法用于快速变化的任务。 这是即使在中小型企业中广泛使用的最大抑制因素之一。
在与人们互动时,会出现全新的危险情况,这对安全技术提出了更高的要求,并且与已经技术上可行的解决方案相比,严重限制了可执行解决方案的比例。
目前还没有完全符合此类机器人的标准,指南或设计方案,因此难以预测受伤或损坏的潜在法律后果。
随着选项数量的增加,对整个系统控制的要求也越来越高,特别是在自主错误处理方面。 这也增加了机器停机的风险。
应用领域
移动机械手的潜在应用领域是多种多样的,目前还不能完全预见。 一些已知的应用是:
送货上门服务
由啤酒getten的广泛应用带来的主要用于服务机器人领域的研究项目,优选用于演示目的的任务,其也发生在私人家庭中并因此在媒体中有效。 这些任务中的科学挑战通常远高于预期的经济效益。
关心
随着老年人和受抚养人的比例增加,对护士的需求也随之增加。 预计到2050年,需要照顾的人口比例将与就业人数相比增加两倍。 因此,在各种研究项目中,特别是在日本,努力照顾机器人。
选择
目前正在开发项目,以便在挑选重型或笨重的部件时使用移动操纵器。 有可能导致高后续成本的错误被阻止。 此外,人员从长期不健康的任务中解放出来,随着劳动力平均年龄的增加,这一任务变得越来越重要。
时间线
| 年 | 机器人名称 | 公司/研究所 |
|---|---|---|
| 1996年 | Hilare 2bis | LAAS-CNRS,法国 |
| 2000 | 乌梅 | 西班牙Jaume I大学机器人智能实验室 |
| 2004年 | 福斯托 | 意大利维罗纳大学 |
| 2006年 | Neobotix MM-500 | 德国Neobotix GmbH |
| 2009年 | 小帮手 | 丹麦奥尔堡大学生产系 |
| 2012 | G-WAM | Robotnik Automation&Barrett Technologies,Spain&United States |
| 2013 | UBR-1 | 无界机器人,美国 |
| 2013 | X-WAM | Robotnik Automation&Barrett Technologies,Spain&United States |
| 2015年 | 卡洛斯 | AIMEN,西班牙 |
| 2015年 | RB-1 | Robotnik Automation&Kinova Robotics,西班牙和加拿大 |
最近
最近的一个例子是奥尔堡大学生产部的移动机械手“Little Helper”。