最大功率点跟踪(MPPT)或有时仅功率点跟踪(PPT))是通常用于风力涡轮机和光伏(PV)太阳能系统的技术,以在所有条件下最大化功率提取。
虽然主要涵盖太阳能,但该原理通常适用于具有可变功率的源:例如,光功率传输和热光电。
PV太阳能系统在它们与逆变器系统,外部电网,电池组或其他电负载的关系方面存在许多不同的配置。 然而,无论太阳能的最终目的地如何,MPPT解决的核心问题是太阳能电池的功率传输效率取决于落在太阳能电池板上的太阳光量和负载的电气特性。 随着日照量的变化,提供最高功率传输效率的负载特性发生变化,从而当负载特性发生变化时系统的效率得到优化,以保持最高效率的功率传输。该负载特性称为最大功率点(MPP),MPPT是找到该点并保持负载特性的过程。 可以设计电路以向光伏电池提供任意负载,然后转换电压,电流或频率以适应其他设备或系统,并且MPPT解决了选择要呈现给电池的最佳负载以便获得的问题。最有用的电力输出。
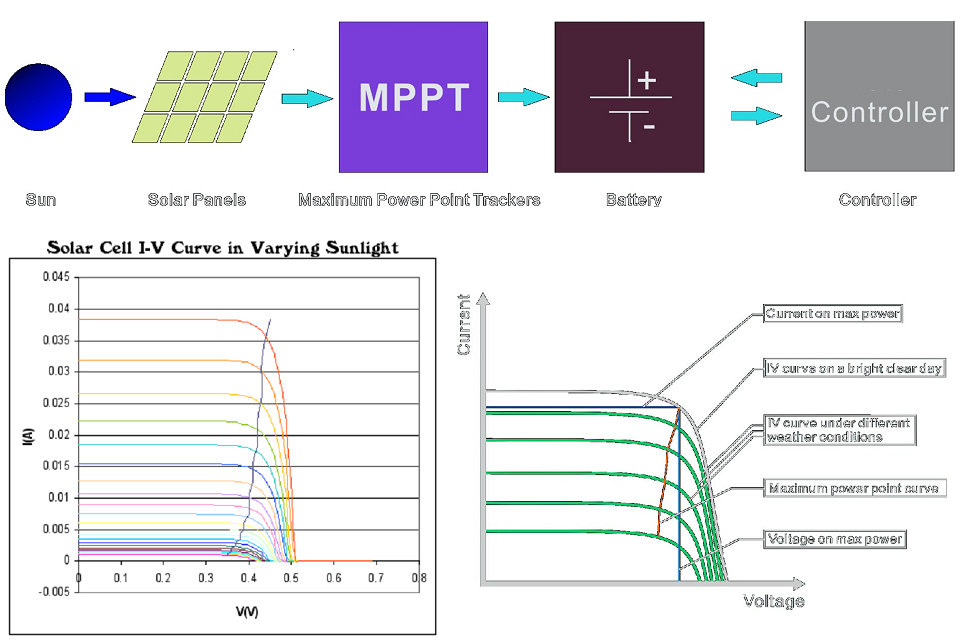
太阳能电池在温度和总电阻之间具有复杂的关系,产生非线性输出效率,可以基于IV曲线进行分析。MPPT系统的目的是对PV电池的输出进行采样并应用适当的电阻(负载)以获得任何给定环境条件下的最大功率。 MPPT设备通常集成到电功率转换器系统中,该系统提供电压或电流转换,滤波和调节以驱动各种负载,包括电网,电池或电动机。
太阳能逆变器将DC电力转换为AC电力并且可以包含MPPT:这样的逆变器对来自太阳能模块的输出功率(IV曲线)进行采样并施加适当的电阻(负载)以获得最大功率。
MPP(Pmpp)的功率是MPP电压(Vmpp)和MPP电流(Impp)的乘积。
定义
均匀照明的太阳能模块的视图
如相反所示的电流 – 电压图通常以这样的方式施加,即显示所测量的太阳能电池的反向电流的技术电流方向。 因此,与传统的二极管特性相比,电流在照明中得到积极的应用。
最大功率点处的太阳能电池的最大功率P MPP与开路电压UL与短路电流IK的乘积之间的比率称为填充因子FF:

具有太阳能电池组件的开路电压功能:
=二极管因子
=开路电压
=饱和电流
=温度电压
=光电流






光电流随着温度的升高而略微上升,在实践中通常被忽略。 随着太阳能模块的照射增加,电流大致成比例地增加,功率增加。 紧张局势几乎没有变化 随着温度的升高,电压会略微下降,因为饱和电流(也称为暗电流)会增加。
因此,电压和电流的乘积产生的功率随着恒定的辐射和增加的模块温度而降低。 对于晶体硅太阳能电池,典型值为每开尔文-0.45%。
在电流 – 电压特性中识别以下属性作为成功功率适配的识别特征:
它适用于MPP中的性能调整:

在MPP中,IU特征接触双曲线,P = Pmpp = const。
MPP将其切线分成两个同样长的部分。
点坐标矩形中的对角线与切线平行。
识别特性归因于局部最大性能特性(dp / dU = 0)。 即使没有性能轴,它们也非常适合于确定或检查特性曲线中MPP的位置。 如果缺少轴缩放,它们也适用。
考虑几个串联遮阳的串联太阳能电池组件
相邻的图示出了一串串联的十个太阳能模块:蓝色虚线表示所有模块均匀照射的情况。 黑色曲线代表十个模块中的两个处于阴影中的情况,并且与其他模块相比仅接收20%的辐射(通过漫射辐射)。
可以看出,在阴影的情况下,不再只有一个性能最大值,而是几个。 以绿色突出显示的是“全球MPP”,即最大功率的实际点。 标记为红色的是“本地MPP”,即性能曲线上的局部高点。
这个过程的原因在于旁路二极管,它们集成在太阳能模块中以保护单个电池:在本地MPP中,所有模块都以相同的低电流运行,阴影模块仍可以提供(通过漫射照射) 。 只有当电压降低或电流增加时,阴影模块的旁路二极管才会响应并关闭这些模块部件,从而桥接它们。 结果,串电压较低(阴影模块实际上在字符串中“丢失”),但电流要高得多,这解释了全局最大值时的较高功率。
背景
光伏电池在其工作环境和它们可以产生的最大功率之间具有复杂的关系。 填充因子(缩写为FF)是表征太阳能电池的非线性电学行为的参数。 填充因子定义为来自太阳能电池的最大功率与开路电压Voc和短路电流Isc的乘积之比。 在列表数据中,它通常用于估计在给定条件下电池可以提供最大负载的最大功率,P = FF * Voc * Isc。 对于大多数目的,FF,Voc和Isc足以提供在典型条件下光伏电池的电学行为的有用近似模型。
对于任何给定的操作条件组,单元具有单个操作点,其中单元的电流(I)和电压(V)的值导致最大功率输出。 这些值对应于特定的负载电阻,其等于欧姆定律规定的V / I. 功率P由P = V * I给出。 对于其有用曲线的大部分,光伏电池充当恒定电流源。 然而,在光伏电池的MPP区域,其曲线在电流和电压之间具有近似的反指数关系。 根据基本电路理论,优化从器件传递到器件的功率,其中IV曲线的导数(图形,斜率)dI / dV等于并且与I / V比(其中dP / dV = 0)相反。 这被称为最大功率点(MPP)并且对应于曲线的“拐点”。
电阻R = V / I等于该值的倒数的负载吸收器件的最大功率。 这有时被称为细胞的“特征抗性”。 这是一个动态量,它根据照明水平以及温度和细胞年龄等其他因素而变化。 如果电阻低于或高于该值,则所汲取的功率将小于可用的最大值,因此电池将不会尽可能有效地使用。 最大功率点跟踪器利用不同类型的控制电路或逻辑来搜索该点,从而允许转换器电路提取单元可用的最大功率。
履行
当负载直接连接到太阳能电池板时,电池板的工作点很少处于峰值功率。 面板看到的阻抗导致太阳能电池板的工作点。 因此,通过改变面板所见的阻抗,可以使工作点朝向峰值功率点移动。 由于面板是直流设备,因此必须使用DC-DC转换器将一个电路(源)的阻抗转换为另一个电路(负载)。 改变DC-DC转换器的占空比导致面板看到的阻抗变化。 在特定阻抗(或占空比)下,工作点将处于峰值功率传输点。 面板的IV曲线可以随着诸如辐射和温度的大气条件的变化而显着变化。 因此,用这种动态变化的操作条件来固定占空比是不可行的。
MPPT实现利用经常采样面板电压和电流的算法,然后根据需要调整占空比。 微控制器用于实现算法。 现代实现通常利用较大的计算机进行分析和负载预测。
分类
控制器可以遵循几种策略来优化阵列的功率输出。 最大功率点跟踪器可以实现不同的算法并基于阵列的操作条件在它们之间切换。
Perturb并观察
在这种方法中,控制器从阵列中调节少量电压并测量功率; 如果功率增加,则尝试在该方向上进一步调整,直到功率不再增加。 这被称为扰动和观察方法并且是最常见的,尽管该方法可导致功率输出的振荡。 它被称为爬山法,因为它取决于功率曲线的上升与低于最大功率点的电压,以及高于该点的下降。 Perturb和observe是最常用的MPPT方法,因为它易于实现。 如果采用适当的预测和自适应爬山策略,则扰动和观察方法可以产生顶级效率。
增量传导
在增量电导方法中,控制器测量PV阵列电流和电压的增量变化以预测电压变化的影响。 该方法需要在控制器中进行更多计算,但是可以比扰动和观察方法(P& O)更快地跟踪变化条件。 与P& O算法一样,它可以产生功率输出的振荡。 该方法利用光伏阵列的增量电导(dI / dV)来计算功率相对于电压(dP / dV)的变化的符号。
增量电导法通过比较增量电导(IΔ/VΔ)与阵列电导(I / V)来计算最大功率点。 当这两者相同(I / V =IΔ/VΔ)时,输出电压是MPP电压。 控制器保持该电压直到照射改变并重复该过程。
增量电导法基于观察到在最大功率点dP / dV = 0,并且P = IV。 来自阵列的电流可以表示为电压的函数:P = I(V)V。 因此,dP / dV = VdI / dV + I(V)。 将此值设置为零会产生:dI / dV = -I(V)/ V. 因此,当增量电导等于瞬时电导的负值时,实现最大功率点。
技术程序
“影子管理”
下面描述的所有方法都是围绕当前性能最大值以相对小的增量寻找MPP。 这具有以下优点:太阳能发电机在大多数时间非常接近MPP(高“MPP适应效率”)。 缺点是部分遮蔽的太阳能发电机中的跟踪器通常保留在本地MPP(见上文),而没有找到通往全球MPP的路。
这就是为什么大多数逆变器制造商现在已经集成了一个附加功能,该功能以非常快的速度定期(通常每5-10分钟)运行太阳能发电机的整个特性,以搜索全球MPP。 此功能称为“影子管理”或“影子管理”,有时称为“扫描功能”,并不代替连续的MPP跟踪。
对于大多数制造商而言,该功能在出厂时已激活,而对于其他制造商则可在菜单中激活。 由于特征曲线的规则遍历(在此期间发电机自然不在MPP中操作)导致的产量损失例如给出为“<0.2%”,例如,穿过特性曲线的持续时间被称为2秒。
应该注意的是,逆变器的输入电压范围是一个限制因素:只有当无阴影模块的数量足以达到逆变器的最小输入电压时,仅这些模块就可以控制全局MPP。 因此,重要的是形成足够长的阴影线以进行阴影处理。 (自从引入阴影管理以来,以前使用阴影形成许多短字符串已经过时了。)
电压增加的方法
以最简单的方式找到最大功率,MPP跟踪器不断增加太阳能电池的负载,从而增加功率输出。 如果达到功率最大值,则功率再次开始降低,这作为搜索的终止标准。 这是一个迭代过程,它不断地在MPP跟踪器中执行微处理器,因此即使在改变照射条件下,总是在最大功率点进行操作。 在部分遮蔽的太阳能发电机的情况下,如果控制器(偶然)在它处,则控制器保持在局部最大值。
负载跳跃的方法
在负载跳跃的方法(英语Perturb和观察)中,控制器在一定方向上以小步长(负载步骤)周期性地改变太阳能电池的负载,然后测量太阳能电池提供的功率。 如果现在测量的功率高于前一周期的测量功率,则控制器保持该搜索方向并进行下一次功率跳跃。 如果测量的功率小于上一个测量周期的功率,则控制器改变搜索方向,现在执行相反方向的负载跳跃。 通过这种方式,不断搜索最大功率,结果是从未找到最大功率的精确点,但是它接近1次负载跳跃,如果它足够小则不成问题。 它创造了一种性能最大化的振荡。 如果太阳能发电机部分遮挡,则控制器保持在局部最大值(如果是)(偶然)。
上升的导电性
增量传导方法的想法基于基于太阳能电池的微分和特定电导来找到最大功率。 最大功率点的特征在于功率输出相对于电压变化的变化变为零。 根据功率曲线的哪一侧是当前负载点,功率 – 电压比随着负载的变化而增大或减小,从而产生以下等式:
在最大值的左侧:
紧邻最大值:


通过变换方程,获得控制器的以下条件,其中I和U是控制周期的当前测量值,dI,dU是前一控制周期的变化。
在最大值的左侧:
紧邻最大值:


在性能最大值:

使用该条件,控制器在其接近期望最大功率的条件的方向上逐步改变每个控制循环的负载。 如果系统满足此条件,则找到性能最大值并且可以结束搜索。 如果输出功率由于太阳能电池的照明强度而改变,则控制器重新开始搜索。
在部分遮蔽的太阳能发电机的情况下,如果控制器(偶然)在它处,则控制器保持在局部最大值。
恒定张力的方法
恒定电压的方法基于太阳能电池的开路电压与太阳能电池提供最大功率的电压之间的关系。 因此,可以基于开路电压的知识得出结论,以消除最大可能的功率负载电压并因此去除负载。 由于空载电压根据不同参数而变化,因此控制器必须在运行期间定期测量它们。 为此,在电压测量期间将负载与太阳能电池分离。 在现在测量的空载电压的基础上,控制器可以计算最佳负载并在重新连接负载和太阳能电池时进行设置。 因为开路电压和最佳负载电压之间的关系是经验性的并且是预先确定的并且取决于许多参数,所以不能获得精确的最大功率。 因此,严格意义上的算法,没有人正在寻找实际的最大功率,并且在teilverschattetem太阳能发电机中不起作用。
技术实施
软件
在该方法的技术实现中,微控制器或数字信号处理器通常执行可能的方法之一。 在这种情况下,处理器是由模数转换器提供的所需测量数据,利用该处理器可以执行必要的计算并通过脉冲宽度调制将结果传递给DC-DC转换器。
硬件
由于太阳能电池的负载是基于负载电压调整的,但调节器的输出电压应该几乎恒定,因此需要DC-DC转换器来调节电压差,从而可以调节太阳能电池上的负载。 在光伏系统的情况下,太阳能电池的最佳负载电压的电压范围很可能围绕蓄电池的电压移动以进行充电。 因此,DC-DC转换器的输入电压可以大于和小于其输出电压。 为了满足这一要求,它需要满足此功能的转换器拓扑,例如逆变换器,分离pi转换器或高阶转换器(UC转换器,SEPIC转换器,双逆变器)。
电流扫描
电流扫描方法使用扫描波形用于PV阵列电流,使得PV阵列的IV特性以固定的时间间隔获得并更新。然后可以以相同的间隔从特性曲线计算最大功率点电压。
恒压
MPP跟踪中的术语“恒定电压”用于描述不同作者的不同技术,其中输出电压在所有条件下被调节到恒定值,并且其中输出电压基于恒定比率被调节到测量开路电压(VOC)。 相反,后一种技术被一些作者称为“开路电压”方法。 如果输出电压保持恒定,则不会尝试跟踪最大功率点,因此严格意义上它不是最大功率点跟踪技术,尽管在MPP跟踪失败的情况下它确实具有一些优势,因此,在这些情况下,它有时用于补充MPPT方法。
在“恒定电压”MPPT方法(也称为“开路电压方法”)中,瞬时中断传递给负载的功率,并测量零电流的开路电压。 然后控制器恢复操作,其中电压控制在开路电压VOC的固定比率,例如0.76。 对于预期的操作条件,这通常是根据经验或基于建模确定为最大功率点的值。 因此,通过调节阵列电压并使其与固定参考电压Vref = kVOC匹配,PV阵列的工作点保持在MPP附近。 也可以选择Vref的值以相对于其他因素以及MPP给出最佳性能,但是该技术的中心思想是Vref被确定为与VOC的比率。
“恒定电压”比率方法的固有近似之一是MPP电压与VOC的比率仅近似恒定,因此为进一步可能的优化留出了空间。
比较方法
扰动和观察以及增量电导都是“爬山”方法的示例,其可以找到PV阵列的操作条件的功率曲线的局部最大值,并且因此提供真实的最大功率点。
扰动和观察方法即使在稳态辐照度下也需要在最大功率点附近振荡功率输出。
增量电导方法具有优于扰动和观察(P&amp; O)方法的优点,即它可以确定最大功率点而不绕该值振荡。 它可以在快速变化的辐照条件下执行最大功率点跟踪,其精度高于扰动和观察方法。 然而,增量电导法可以产生振荡(无意中)并且可以在快速变化的大气条件下不稳定地执行。 由于与P&amp; O方法相比算法的复杂性更高,采样频率降低。
在恒定电压比(或“开路电压”)方法中,来自光伏阵列的电流必须暂时设定为零以测量开路电压,然后设定为测量电压的预定百分比,通常约为76%。 在电流设定为零的过程中可能浪费能量。 作为MPP / VOC比率的近似值76%不一定准确。 虽然实现简单且成本低,但是中断降低了阵列效率并且不能确保找到实际的最大功率点。 但是,某些系统的效率可能会达到95%以上。
MPPT安置
传统的太阳能逆变器作为整体执行整个光伏阵列(模块关联)的MPPT。 在这样的系统中,由逆变器指示的相同电流流过串(串联)中的所有模块。 由于不同的模块具有不同的IV曲线和不同的MPP(由于制造公差,部分着色等),这种架构意味着一些模块将在其MPP以下执行,导致效率降低。
一些公司(参见功率优化器)现在将最大功率点跟踪器放入单个模块中,尽管不均匀的阴影,污染或电气不匹配,每个模块都能以峰值效率运行。
数据表明,与具有两个逆变器或一个具有多个MPPT的逆变器相比,具有一个MPPT的逆变器用于具有东和西向模块的项目没有任何缺点。
用电池操作
在晚上,离网光伏系统可以使用电池来提供负载。 尽管完全充电的电池组电压可能接近PV电池板的最大功率点电压,但在电池部分放电的日出时不太可能出现这种情况。 充电可以在远低于PV面板最大功率点电压的电压下开始,并且MPPT可以解决这种不匹配。
当离网系统中的电池完全充电并且PV产生超过本地负载时,MPPT不能再以最大功率点操作面板,因为多余的功率没有负载来吸收它。 然后,MPPT必须将PV面板工作点从峰值功率点移开,直到生产完全匹配需求。 (航天器中常用的另一种方法是将多余的光伏电能转移到电阻性负载中,使面板能够在其峰值功率点连续工作。)
在并网光伏系统中,来自太阳能模块的所有输出功率将被发送到电网。 因此,并网光伏系统中的MPPT将始终尝试在其最大功率点处操作PV模块。