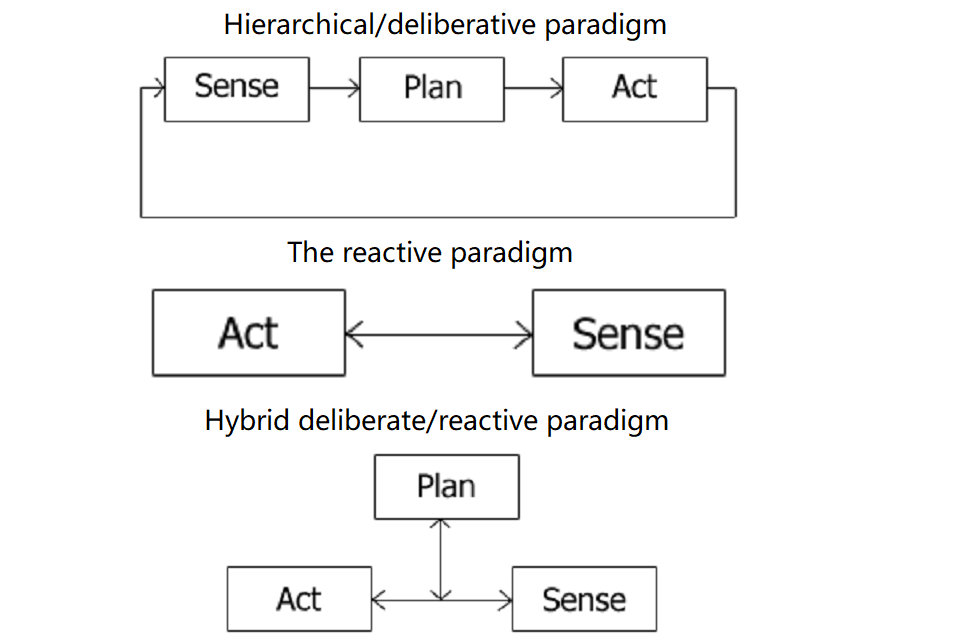
在机器人技术中,机器人范式(Robotic paradigm)是机器人如何运作的心理模型。 机器人范…
在人工智能中,反应性规划(Reactive planning)表示由自主代理选择行动的一组技术。 这…
发展机器人(DevRob),有时也称为表观遗传机器人,是一个科学领域,旨在研究发展机制,架构和约束,…
适应性机器人(Adaptable robotics)通常基于机器人开发工具套件。 该技术与静态自动化…
机器人软件是一组编码命令或指令,它们告诉机械设备和电子系统,一起称为机器人,执行哪些任务。 机器人软…
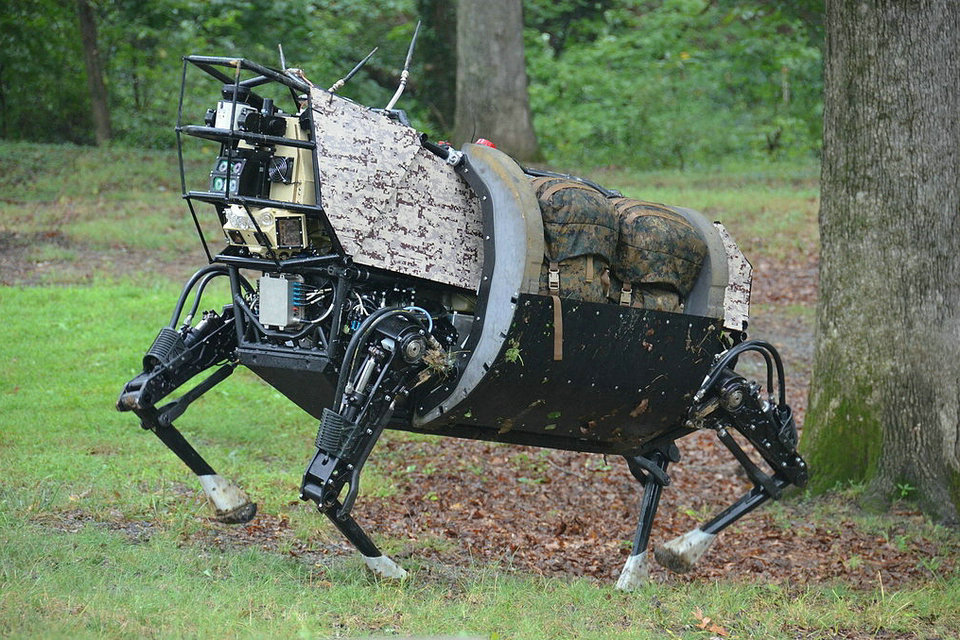
六足机器人(Hexapod robotics)是一种六腿行走的机械车辆。 由于机器人可以在三条腿或更…
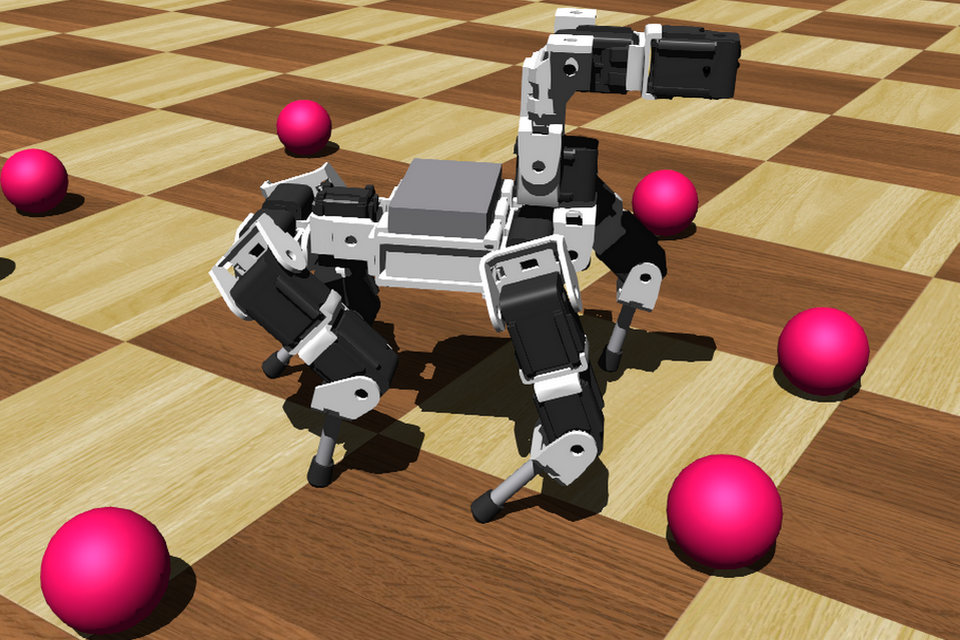
腿式机器人 腿式机器人是一种使用机械肢体进行移动的移动机器人。 它们比轮式机器人更通用,并且可以穿越…
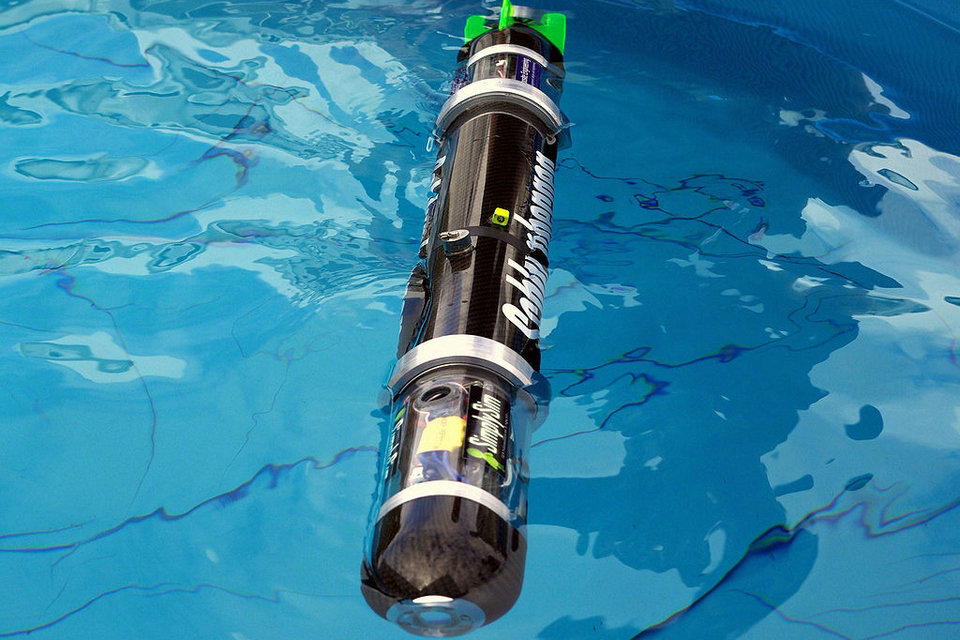
自主水下航行器(Autonomous underwater vehicle AUV)是一种在不需要操…
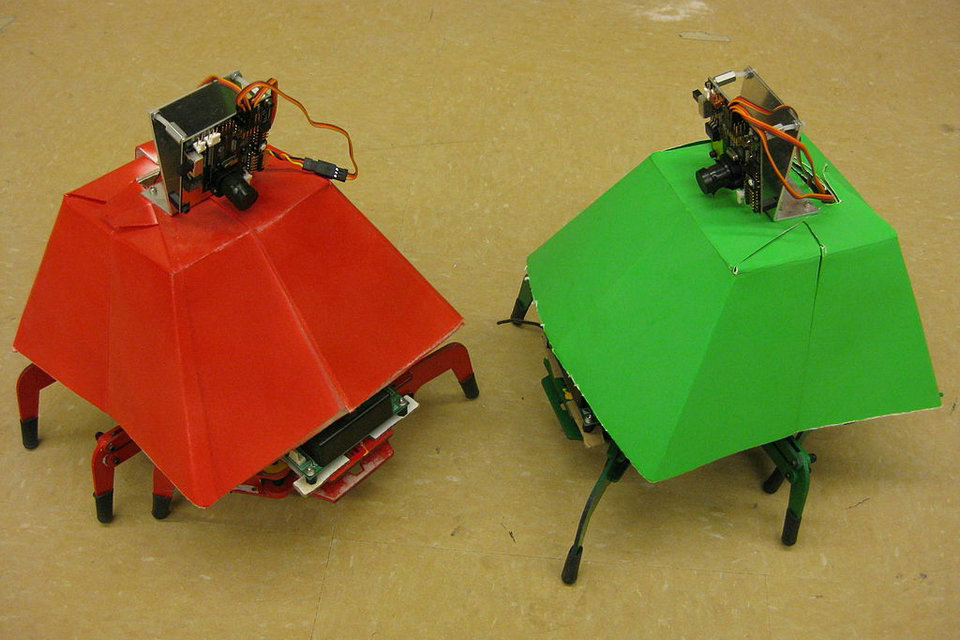
群体机器人(Swarm robotics)是一种协调多个机器人的方法,该系统由大量简单的物理机器人组…
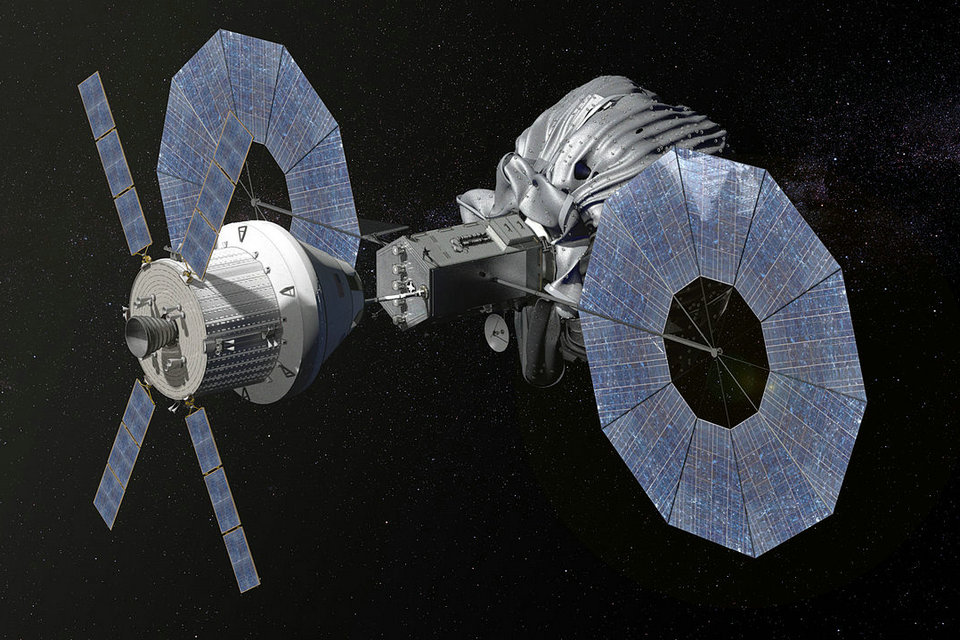
机器人航天器(Robotic spacecraft)是一种无人驾驶航天器,通常在遥控机器人控制下。 …
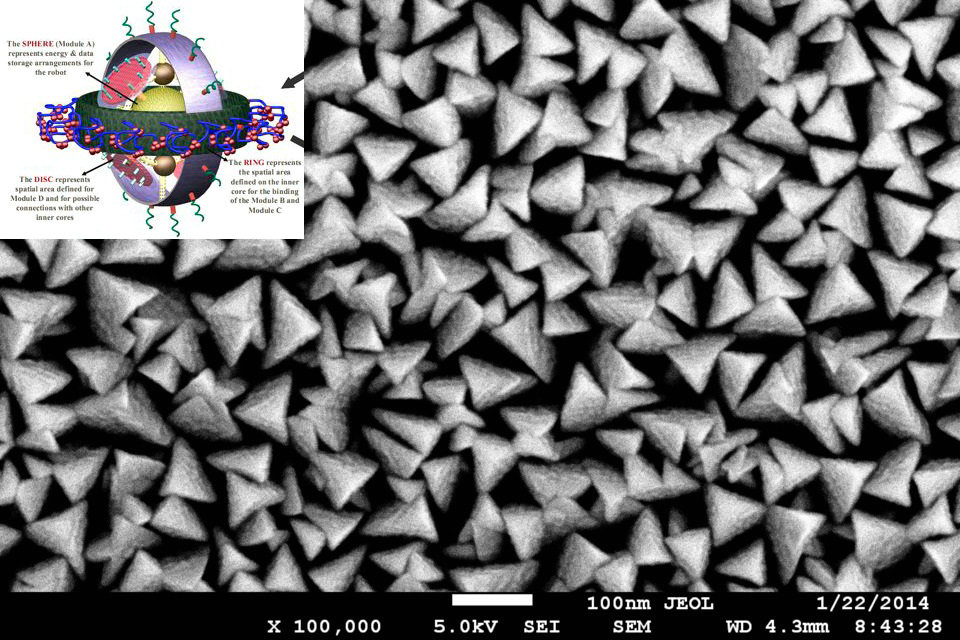
纳米机器人(Nanorobotics)是一个新兴的技术领域,创造机器或机器人,其组件处于或接近纳米(…
微机器人(Microbotics)是微型机器人领域,特别是具有小于1mm的特征尺寸的移动机器人。 该…
无人驾驶地面车辆(Unmanned ground vehicle UGV)是在与地面接触并且没有人在…
无人驾驶飞行器(Unmanned aerial vehicle UAV),通常称为无人机,是一种没有…
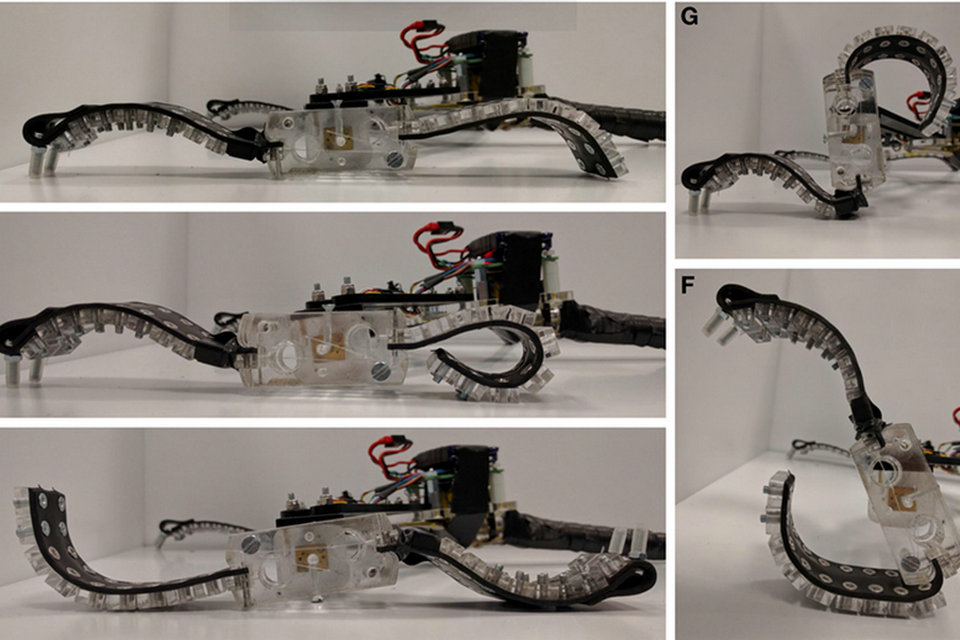
柔性机器人或软体机器人(Soft robotics)是机器人技术的特定子领域,涉及从高度柔顺的材料构…