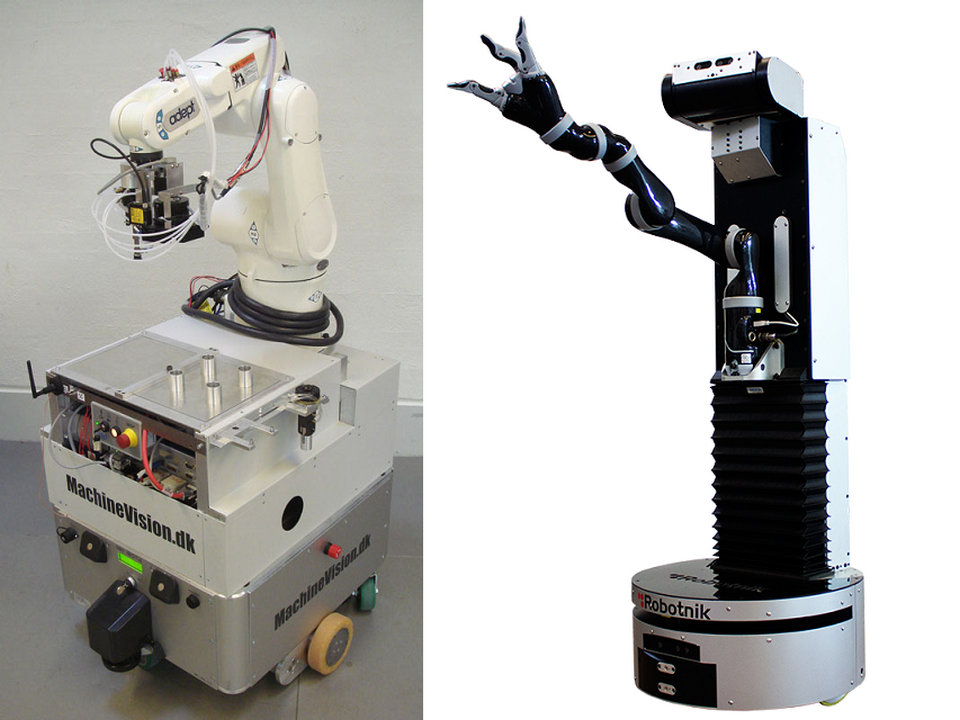
Роботизированная рука — это тип механического рычага, обычно программируемого, с аналогичными функциями с человеческой рукой; рука может быть суммой всего механизма или может быть частью более сложного робота. Соединения такого манипулятора связаны суставами, допускающими вращательное движение (например, в шарнирном роботе) или поступательное (линейное) смещение. Связи манипулятора можно рассматривать как образующие…