Медицинский робот — робот, используемый в медицинских науках. К ним относятся хирургические роботы. Это в большинстве телеманипуляторов, которые используют действия хирурга с одной стороны для контроля «эффектора» с другой стороны.
Типы
Хирургические роботы:
Либо позвольте проводить хирургические операции с большей точностью, чем невооруженным человеческим хирургом, или позволить удаленную хирургию, когда физиотерапевт физически не присутствует с пациентом.
Реабилитационные роботы:
Содействовать и поддерживать жизнь немощных, пожилых людей или лиц с дисфункцией частей тела, которые влияют на движение. Эти роботы также используются для реабилитации и соответствующих процедур, таких как обучение и терапия.
биороботов:
Группа роботов, призванная имитировать познание людей и животных.
Телеприсутствия:
Позвольте медицинским работникам за пределами площадки перемещаться, оглядываться, общаться и участвовать в удаленных местах.
Аптечная автоматизация:
Роботизированные системы для дозирования оральных твердых веществ в розничной аптеке или приготовления стерильных добавок IV в аптеке больницы.
Компаньон-робот:
Имеет возможность эмоционально взаимодействовать с пользователями, поддерживающими их компанию и предупреждающими, если есть проблема с их здоровьем.
Автоматизация доставки лекарств
Робот, который выполняет твердое пероральное введение лекарственного средства или робот, который готовит стерильную примесь IV.
Дезинфекционный робот:
Имеет возможность дезинфицировать всю комнату за считанные минуты, обычно используя импульсный ультрафиолетовый свет. Они используются для борьбы с вирусной болезнью Эбола.
Коляска-робот
С возможностями обнаружения и навигации, путем разговоров, а затем до места назначения.
Медицинский микро робот
Встроенная ультра-маленькая камера, может напрямую вводить наркотики в организм человека.
история
Первым хирургическим роботом в мире является Arthrobot, разработанный и впервые примененный в Ванкувере в 1983 году. Команда, стоящая за этим роботом, была составлена из доктора Джеймса Макьювена, биомедицинского инженера, Geof Auchinleck, аспиранта по инженерной физике из UBC , Д-р Брайан Дей, хирург и группа инженеров-студентов. Самый первый робот использовался 12 марта 1984 года во время операции ортопедической хирургии в больнице UBC в Ванкувере. В первый год и в 1985 году было проведено более 60 артроскопических операций, а в документальном фильме о промышленных роботах National Geographic появилась революция робототехники.
В дополнение к этому хирургу-помощнику-роботу, который передал хирургические инструменты по голосовой команде, можно сказать, что среди других роботизированных устройств, разработанных в то же время, роботизированная рука медицинской лаборатории.
Компания Computer Motion является пионером в области медицинских роботов с AESOP, используемым в Канаде и ZEUS, используемом в Европе. В 2003 году Intuitive Surgical и Computer Motion объединились с названием Intuitive Surgical. Затем ZEUS заброшен в пользу Da Vinci ..
Новые направления исследований и разработок включают наноботы и мягкую робототехнику.
Используемые медицинские роботы
Многие медицинские роботы используются во всем мире. Существует два вида медицинских роботов.
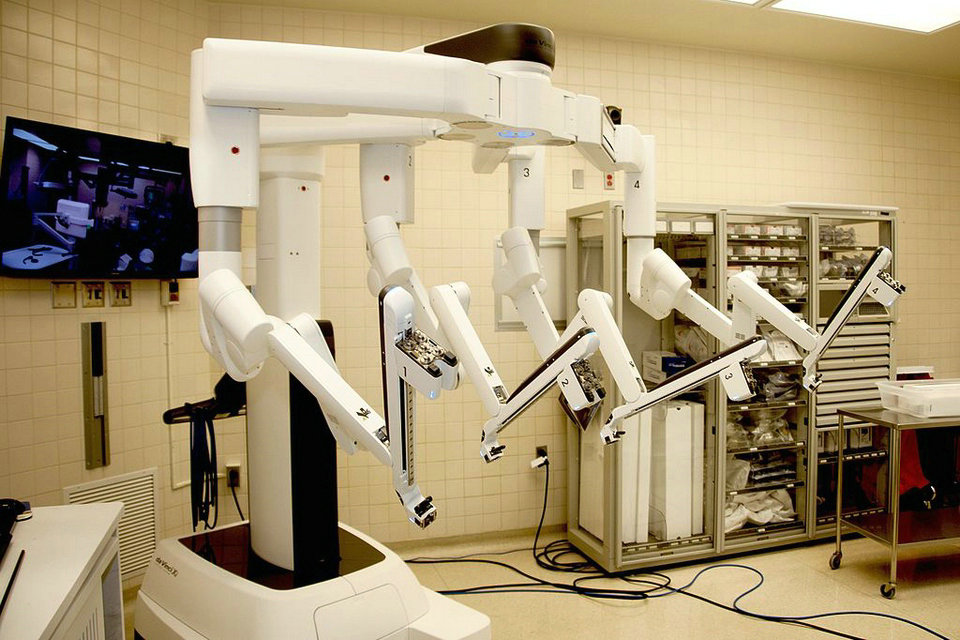
С одной стороны, интервенционные роботы, используемые в хирургии. Сегодня самым популярным роботом в этом секторе является робот Da Vinci. Он используется, главным образом в США и Европе, для различных минимально инвазивных хирургических операций в брюшной и грудной полостях пациентов. Его основным применением является хирургия простаты: 60% операций простаты в Соединенных Штатах использовали Da Vinci. В последние годы появились другие роботизированные хирургические системы. Устройство ROSA предназначено для минимально инвазивных процедур черепа, или Sensei для лечения нарушений сердечного ритма. Cyberknifeis еще один пример, который служит для уничтожения опухолей неинвазивно. Он отслеживает местоположение опухоли и цели непрерывно во время процедуры. Так называемые эндоскопические роботы используются для оказания помощи хирургу во время операции, удерживая камеру во время эндоскопии. Для этого в больницах используются роботы, такие как EndoAssist или Viky. Наконец, некоторые роботы не используются непосредственно для оказания помощи самой хирургической процедуре, а для вспомогательных задач в операционной. Это относится к системе Artis Zeego, которая позволяет перемещать плоскость изображения флюороскопии в режиме реального времени во время операции.
С другой стороны, роботы, используемые для реабилитации пациентов, например, после инсульта. Так обстоит дело, например, с системами Lokomat и In-Motion, которые помогают реабилитационной работе пациента, оказывая роботизированную помощь. В настоящее время ведется много исследований по использованию экзоскелетонов в реабилитации, но они еще не достигли коммерческой стадии.
Области применения
Общая хирургия
Кардиоторакальная хирургия
электрофизиологии
Гинекология
нейрохирургия
радиология
урология
Ограничения
Современное оборудование очень дорого. В результате медицинская робототехника используется очень мало. Оценка интереса роботизированной хирургии к пациенту по сравнению с обычной хирургией ограничена, и некоторые поднимают вопрос о квалификации хирургов, работающих главным образом у робота, и которые затем рискуют лишиться опыта, когда требуется обычное вмешательство.
В реабилитации используются различные роботы, также дорогие. Обзор в 2018 году, включающий сравнение эффективности реабилитационной терапии с помощью роботов-зеркал по сравнению с менее сложными реабилитациями, показал, что качество исследований в этой области очень низкое, несмотря на значительные государственные инвестиции. Поэтому авторы считают необоснованным вкладывать средства в этот тип реабилитационного устройства.