Na robótica, um paradigma robótico é um modelo mental de como um robô opera. Um paradigma robótico pode ser descrito pela relação entre os três primitivos da robótica: Sense Plan Act. Também pode ser descrito como os dados sensoriais são processados e distribuídos pelo sistema e onde as decisões são tomadas.
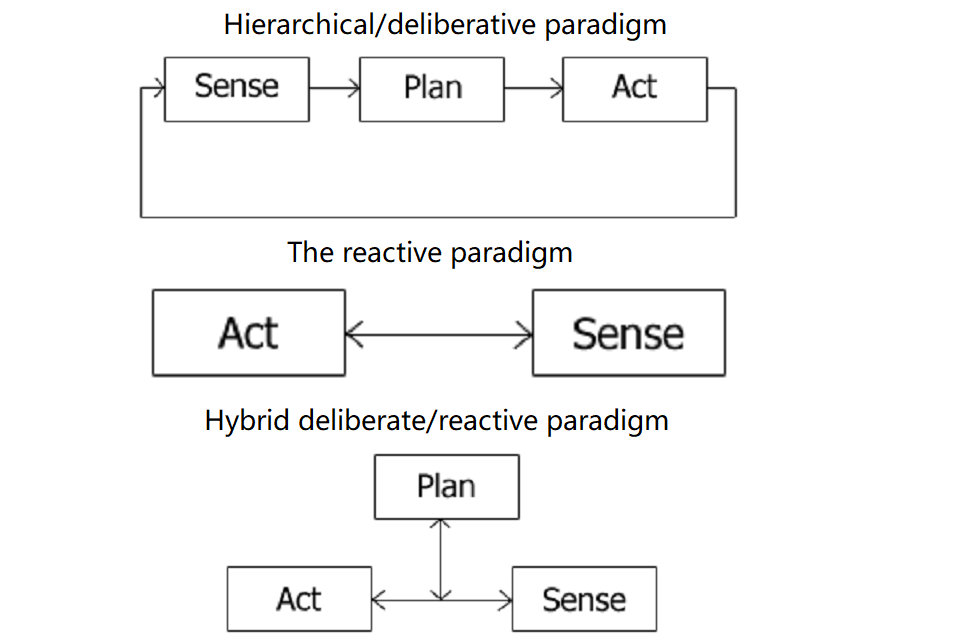
Paradigma Hierárquico / Deliberativo
O robô opera de maneira descendente, pesado no planejamento.
O robô sente o mundo, planeja a próxima ação, age; a cada passo, o robô planeja explicitamente o próximo movimento.
Todos os dados de detecção tendem a ser reunidos em um modelo mundial global.
O paradigma reativo
Tipo de organização do tipo Sense-act.
O robô tem várias instâncias de acoplamentos Sense-Act.
Esses acoplamentos são processos simultâneos, chamados comportamentos, que pegam os dados de detecção locais e calculam a melhor ação a ser tomada independentemente do que os outros processos estão fazendo.
O robô fará uma combinação de comportamentos.
Paradigma híbrido deliberado / reativo
O robô primeiro planeja (delibera) como decompor melhor uma tarefa em subtarefas (também chamado de “planejamento de missão”) e quais são os comportamentos adequados para realizar cada subtarefa.
Então os comportamentos começam a ser executados conforme o Paradigma Reativo.
A organização de sensores também é uma mistura de estilos hierárquicos e reativos; os dados do sensor são roteados para cada comportamento que precisa desse sensor, mas também estão disponíveis para o planejador para a construção de um modelo mundial global orientado por tarefas.