O manipulador móvel é hoje um termo generalizado para se referir a sistemas robóticos construídos a partir de um braço manipulador robótico montado em uma plataforma móvel. Tais sistemas combinam as vantagens de plataformas móveis e braços manipuladores robóticos e reduzem suas desvantagens. Por exemplo, a plataforma móvel estende o espaço de trabalho do braço, enquanto um braço oferece várias funcionalidades operacionais.
Descrição
Um sistema de manipulação móvel oferece uma dupla vantagem de mobilidade oferecida por uma plataforma móvel e destreza oferecida pelo manipulador. A plataforma móvel oferece espaço de trabalho ilimitado para o manipulador. Os graus extras de liberdade da plataforma móvel também fornecem ao usuário mais opções. No entanto, a operação de tal sistema é desafiadora por causa dos muitos graus de liberdade e do ambiente não estruturado em que ele executa.
Composição geral do sistema:
Plataforma móvel
Manipulador de robô
Visão
Ferramental
Motivação
No momento, a manipulação móvel é um assunto de grande foco em ambientes de desenvolvimento e pesquisa, e manipuladores móveis, autônomos ou teleoperados, são usados em muitas áreas, por exemplo, exploração espacial, operações militares, atendimento domiciliar e assistência médica. No entanto, no campo industrial, a implementação de manipuladores móveis tem sido limitada, embora as necessidades de automação inteligente e flexível estejam presentes. Além disso, as entidades tecnológicas necessárias (plataformas móveis, manipuladores de robôs, visão e ferramentas) são, em grande medida, componentes disponíveis no mercado.
Uma razão para isso é que as indústrias manufatureiras agem tradicionalmente e, portanto, têm relutância em assumir riscos implementando novas tecnologias. Além disso, no campo da manipulação móvel industrial, o centro de atenção tem sido a otimização das tecnologias individuais, especialmente manipuladores de robôs e ferramentas, enquanto a integração, o uso e a aplicação foram negligenciados. Isso significa que poucas implementações de robôs móveis, em ambientes de produção, foram relatadas – por exemplo, e.
Componentes
Plataforma de robô móvel
Como uma base móvel, ambos os sistemas clássicos de transporte sem motorista e robôs móveis podem ser usados. O uso de um robô móvel tem a vantagem de poder navegar livremente e autonomamente na sala e assim o manipulador em caso de problemas (alvo fora de alcance, manipulação da posição atual da cinemática não possível, mudança na posição das partes ser usinado, etc.) pode suportar diretamente em vez de transportá-lo apenas para uma posição fixa. A manobrabilidade da plataforma é muito importante. Em contraste com o FTS, um robô móvel também pode abordar posições atribuídas dinamicamente a qualquer momento. Entretanto, a cinemática diferencial clássica, especialmente na vizinhança imediata das estações de trabalho, atinge seus limites e o robô só pode ser movido por manobras mais ou menos complicadas. O uso Portanto, unidades omnidirecionais estão se tornando cada vez mais populares.
Opções de armazenamento
Se o manipulador móvel também é para transportar objetos de forma eficiente, ele deve estar equipado com instalações de armazenamento adequadas. Estes podem, com design apropriado, também ser usado para permitir a mudança da alça, sem um segundo braço é usado. (Por exemplo, uma garrafa de cerveja que foi retirada da caixa no fecho tem de ser colocada e agarrada ao corpo antes de poder ser deitada). Opções de armazenamento maiores tornam o trabalho do robô mais eficiente em princípio, mas também dificultam a navegação no veículo.
Braço manipulador
Isso pode ser tanto um robô industrial quanto um braço robótico especialmente desenvolvido. Com uma seleção de braços robóticos pequenos e leves agora comercialmente disponíveis, o uso de braços autodesenvolvidos diminuiu significativamente. (Veja também: braço manipulador flexível)
Pinça
O efetor final deve ser selecionado para se adequar ao item a ser manipulado. Pinças antropomórficas com múltiplos dedos em movimento estão cada vez mais disponíveis e são usadas principalmente em pesquisas.
Processamento de imagem
Quando o robô é manipular peças no ambiente de trabalho, um sistema de processamento de imagens é quase sempre necessário. Se apenas movimentos fixos do braço forem realizados, pelo menos o deslocamento entre a posição atual e a posição da plataforma usada durante o treinamento deve ser determinado e levado em consideração. A fim de assumir as tarefas dos trabalhadores humanos, o robô também deve lidar com partes mais ou menos desordenadas (também conhecidas como alças na caixa) ou locais de armazenamento variáveis.
Controle de coordenação
Os controles individuais de robôs móveis e braços robóticos estão em uso há décadas e estão bem desenvolvidos. Ao combinar os dois sistemas, no entanto, um número muito grande de possíveis erros e casos de problemas surgem, o que torna necessário adicionar um controle de coordenação adicional. Acima de tudo, isso deve encontrar soluções independentemente se a manipulação ordenada não puder ser executada, mas seria possível fazê-lo a partir de outra pose. É útil controlar todo o sistema como uma cadeia cinemática fechada, que é extremamente difícil de implementar na implementação devido à alta redundância.
Sistema de segurança
Em princípio, é possível usar os dispositivos de segurança que são usados para braços manipuladores estacionários ou veículos autônomos normais, também para manipuladores móveis.No entanto, quando um manipulador móvel compartilha a área de trabalho com pessoas ou pelo menos com outros veículos, o sistema de segurança está sujeito a requisitos completamente novos e muito exigentes, uma vez que surgem muitas situações perigosas possíveis.
Vantagens e desvantagens
Ao combinar plataformas móveis robóticas com braços robóticos, as vantagens e desvantagens resultantes são maiores que a soma de suas respectivas partes.
Vantagens:
O escopo de funções e as possíveis aplicações são saltos e limites.
Todo o sistema robótico torna-se significativamente mais independente dos sistemas de suporte (estações de carga e descarga, equipamentos de manuseio de materiais, equipamentos de transferência, …) e pode, ao menos teoricamente, tornar-se mais barato.
Os manipuladores móveis também possibilitam automatizar atividades físicas mais complexas que anteriormente só podiam ser realizadas por seres humanos e, muitas vezes, causavam problemas de saúde devido ao exercício.
O sistema global pode reagir de forma muito mais flexível a imprecisões e desvios, por exemplo, rastreando a base do braço quando um objeto não está diretamente acessível.
Desvantagem:
Devido aos requisitos de ambos os componentes, estes geralmente interferem uns com os outros:
O braço precisa de uma grande base estável para funcionar de forma eficiente, mas a plataforma deve ser pequena e leve para navegar de forma eficiente.
Quanto mais curtos forem os tempos de ciclo da plataforma, mais rápido será o acionamento e as posições de destino menos precisas serão atingidas. Quanto mais impreciso, mas a posição inicial do braço é conhecida, mais são devido às correções necessárias em seus tempos de ciclo.
Para aumentar a vida de uma plataforma alimentada por bateria, o peso total e o consumo de energia devem ser minimizados. No entanto, um braço robótico funciona com mais eficiência, mais funções (e, portanto, geralmente também componentes adicionais) combinados.
O fato de que o ambiente de trabalho do braço está em constante mudança, muitas estruturas auxiliares usadas anteriormente (fornecimento de peças em relação à posição final definida pelo braço, posições de transferência imutáveis para componentes, iluminação definida, etc.) não são mais difíceis usar.
Além disso, muitos manipuladores móveis não são flexíveis o suficiente para serem usados em tarefas que mudam rapidamente. Esta é uma das maiores inibições para uso generalizado mesmo em pequenas e médias empresas.
Ao interagir com as pessoas, surgem situações perigosas completamente novas, que aumentam as exigências sobre a tecnologia de segurança e limitam severamente a proporção de soluções executáveis em comparação com as soluções já tecnicamente viáveis.
Atualmente, não há padrões, diretrizes ou propostas de projeto totalmente compatíveis para esse tipo de robô, o que dificulta a previsão das potenciais consequências legais de ferimentos ou danos.
Com o aumento do número de opções, também há uma demanda desproporcionalmente maior de controle do sistema geral, especialmente no que diz respeito ao tratamento de erros autônomo. Isso também aumenta o risco de inatividade da máquina.
Areas de aplicação
Os campos potenciais de aplicação de manipuladores móveis são diversos e atualmente não são totalmente previsíveis. Algumas aplicações conhecidas são:
Serviços de entrega em domicílio
Liderados pela aplicação generalizada de cerveja obtida são utilizados principalmente em projetos de pesquisa no campo da robótica de serviço, de preferência tarefas para fins de demonstração, que também ocorrem em domicílios particulares e são, portanto, eficazes na mídia. O desafio científico nessas tarefas é geralmente consideravelmente maior do que os benefícios econômicos esperados.
Cuidado
À medida que aumenta a proporção de pessoas idosas e dependentes, também aumentará a necessidade de enfermeiros. Espera-se que até 2050 a proporção de pessoas necessitadas de cuidados triplicará em relação ao número de pessoas empregadas. portanto, em vários projetos de pesquisa, especialmente no Japão, trabalhou muito para cuidar de robôs.
Picking
Projetos de desenvolvimento estão atualmente em andamento para usar manipuladores móveis na coleta de componentes pesados ou de difícil manejo. Há erros, que podem causar altos custos de acompanhamento, são evitados. Além disso, os trabalhadores humanos estão livres de tarefas insalubres de longo prazo, o que se torna mais relevante quanto mais aumenta a idade média da força de trabalho.
Timeline
| Ano | Nome do robô | Empresa / Instituto de Pesquisa |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS, França |
| 2000 | Jaume | Laboratório de Inteligência Robótica, Universidade Jaume I, Espanha |
| 2004 | FAUStO | Universidade de Verona, Itália |
| 2006 | Neobotix MM-500 | Neobotix GmbH, Alemanha |
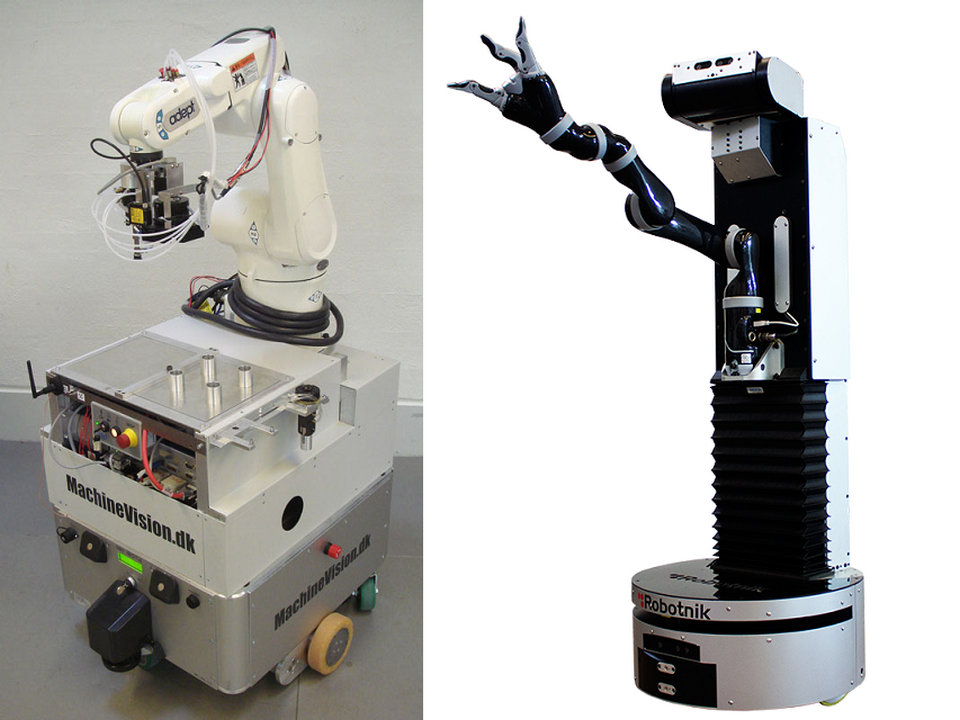
| 2009 | Ajudante | Departamento de Produção, Universidade de Aalborg, Dinamarca |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies, Espanha e Estados Unidos |
| 2013 | UBR-1 | Robótica sem limite, Estados Unidos |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies, Espanha e Estados Unidos |
| 2015 | CARLOS | AIMEN, Espanha |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics, Espanha e Canadá |
Estado da arte
Um exemplo recente é o manipulador móvel “Little Helper”, do Departamento de Produção da Universidade de Aalborg.