Um robô médico é um robô usado nas ciências médicas. Eles incluem robôs cirúrgicos. Estes são na maioria dos telemanipuladores, que usam as ações do cirurgião de um lado para controlar o “efetor” do outro lado.
Tipos
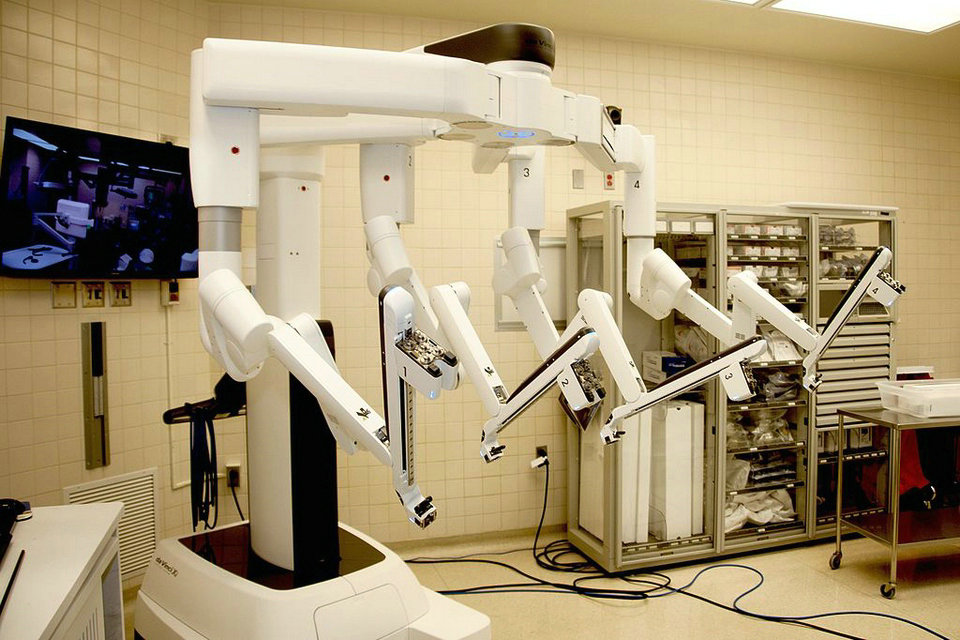
Robôs cirúrgicos:
Permitir que operações cirúrgicas sejam executadas com maior precisão do que um cirurgião humano, ou permitir cirurgias remotas onde um cirurgião humano não esteja fisicamente presente com o paciente.
Robôs de reabilitação:
Facilitar e apoiar a vida de pessoas doentes, idosas ou com disfunção de partes do corpo que afetam o movimento. Esses robôs também são usados para reabilitação e procedimentos relacionados, como treinamento e terapia.
Biorrobôs:
Um grupo de robôs projetado para imitar a cognição de humanos e animais.
Robôs de telepresença:
Permitir que profissionais da área médica off-site se movimentem, olhem em volta, se comuniquem e participem de locais remotos.
Automação de farmácia:
Sistemas robóticos para dispensar sólidos orais em uma farmácia de varejo ou preparar misturas IV estéreis em um ambiente de farmácia hospitalar.
Robô Companheiro:
Tem a capacidade de se envolver emocionalmente com os usuários, mantendo-os em contato e alertando se há um problema com sua saúde.
Automação de entrega de medicamentos
Um robô que realiza a administração de medicamentos orais sólidos ou um robô que prepara uma mistura IV estéril.
Robô de desinfecção:
Tem a capacidade de desinfetar uma sala inteira em poucos minutos, geralmente usando luz ultravioleta pulsada. Eles estão sendo usados para combater a doença do vírus Ebola.
Robô de cadeira de rodas
Com capacidades de detecção e navegação, através de conversas e depois para o destino.
Micro robô médico
Built-in câmera ultra-pequena, pode colocar diretamente drogas no corpo humano.
História
O primeiro robô cirúrgico do mundo é o Arthrobot, desenvolvido e usado pela primeira vez em Vancouver em 1983. A equipe por trás desse robô era composta pelo Dr. James McEwen, engenheiro biomédico, Geof Auchinleck, um estudante de graduação em física de engenharia da UBC. Dr. Brian Day, cirurgião e um grupo de estudantes de engenharia. O primeiro robô foi usado em 12 de março de 1984 durante uma operação de cirurgia ortopédica no UBC Hospital em Vancouver. Mais de 60 cirurgias artroscópicas foram realizadas no primeiro ano e, em 1985, um documentário sobre os robôs industriais da National Geographic, The Robotics Revolution, introduziu o dispositivo.
Além deste robô cirurgião assistente que deu os instrumentos cirúrgicos por comando de voz, pode-se mencionar, entre outros dispositivos robóticos desenvolvidos ao mesmo tempo, um braço robótico de laboratório médico.
A empresa Computer Motion é pioneira no ramo de robôs médicos com o AESOP, usado no Canadá e no ZEUS, usado na Europa. Em 2003, a Intuitive Surgical e a Computer Motion fundiram-se com o nome de Intuitive Surgical. O ZEUS é então abandonado em favor do Da Vinci ..
Novas pistas para pesquisa e desenvolvimento incluem nanorrobôs e robótica leve.
Robôs médicos em uso
Muitos robôs médicos estão em uso em todo o mundo. Existem dois tipos de robôs médicos.
Por um lado, robôs intervencionistas, usados em cirurgia. O robô mais usado hoje neste setor é o robô Da Vinci. É usado, principalmente nos Estados Unidos e na Europa, para várias cirurgias minimamente invasivas nas cavidades abdominais e torácicas dos pacientes. Sua principal aplicação é a cirurgia de próstata: 60% das operações de próstata nos Estados Unidos usaram um Da Vinci. Outros sistemas de cirurgia robótica surgiram nos últimos anos. O dispositivo ROSA é dedicado a procedimentos cranianos minimamente invasivos ou ao Sensei para tratar distúrbios do ritmo cardíaco. O Cyberknife é outro exemplo, que serve para destruir tumores não invasivos. Ele rastreia a localização do tumor e do alvo continuamente durante o procedimento. Os chamados robôs de endoscópio são usados para auxiliar o cirurgião durante uma operação segurando a câmera durante uma endoscopia. Robôs como o EndoAssist ou o Viky são usados em hospitais para esse propósito. Finalmente, alguns robôs não são usados diretamente para auxiliar o procedimento cirúrgico em si, mas para tarefas auxiliares na sala de cirurgia. É o caso do sistema Artis Zeego, que possibilita a movimentação do plano de imagem de um sistema de fluoroscopia em tempo real durante uma operação.
Por outro lado, os robôs utilizados para a reabilitação de pacientes, por exemplo, após um acidente vascular cerebral. Este é o caso, por exemplo, dos sistemas Lokomat e In-Motion, que auxiliam o trabalho de reabilitação do paciente, fornecendo assistência robótica. Muita pesquisa está em andamento para o uso de exoesqueletos na reabilitação, mas estes ainda não atingiram o estágio comercial.
Campos de uso
Cirurgia geral
Cirurgia cardiotoráxica
eletrofisiologia
Ginecologia
Neurocirurgia
Radiologia
Urologia
Limitações
O equipamento atual é muito caro. Como resultado, a robótica médica é usada muito pouco. A avaliação do interesse de uma cirurgia robótica pelo paciente, comparada a uma cirurgia convencional, é limitada e alguns levantam a questão da qualificação dos cirurgiões que operam principalmente pelo robô e que, então, correm o risco de não ter experiência quando uma intervenção convencional é necessária.
Na reabilitação, vários robôs também são caros. Uma revisão em 2018, incluindo a comparação da eficácia da terapia de reabilitação por robôs espelho em comparação com reabilitações menos sofisticadas, concluiu que a qualidade dos estudos no campo é muito baixa, apesar do forte investimento público. Portanto, não é razoável, segundo os autores, investir neste tipo de dispositivo de reabilitação.