Maximum power point tracking (MPPT) or sometimes just power point tracking (PPT)) is a technique used commonly with wind turbines and photovoltaic (PV) solar systems to maximize power extraction under all conditions.
Although solar power is mainly covered, the principle applies generally to sources with variable power: for example, optical power transmission and thermophotovoltaics.
PV solar systems exist in many different configurations with regard to their relationship to inverter systems, external grids, battery banks, or other electrical loads. Regardless of the ultimate destination of the solar power, though, the central problem addressed by MPPT is that the efficiency of power transfer from the solar cell depends on both the amount of sunlight falling on the solar panels and the electrical characteristics of the load. As the amount of sunlight varies, the load characteristic that gives the highest power transfer efficiency changes, so that the efficiency of the system is optimized when the load characteristic changes to keep the power transfer at highest efficiency. This load characteristic is called the maximum power point (MPP) and MPPT is the process of finding this point and keeping the load characteristic there. Electrical circuits can be designed to present arbitrary loads to the photovoltaic cells and then convert the voltage, current, or frequency to suit other devices or systems, and MPPT solves the problem of choosing the best load to be presented to the cells in order to get the most usable power out.
Solar cells have a complex relationship between temperature and total resistance that produces a non-linear output efficiency which can be analyzed based on the I-V curve. It is the purpose of the MPPT system to sample the output of the PV cells and apply the proper resistance (load) to obtain maximum power for any given environmental conditions. MPPT devices are typically integrated into an electric power converter system that provides voltage or current conversion, filtering, and regulation for driving various loads, including power grids, batteries, or motors.
Solar inverters convert the DC power to AC power and may incorporate MPPT: such inverters sample the output power (I-V curve) from the solar modules and apply the proper resistance (load) so as to obtain maximum power.
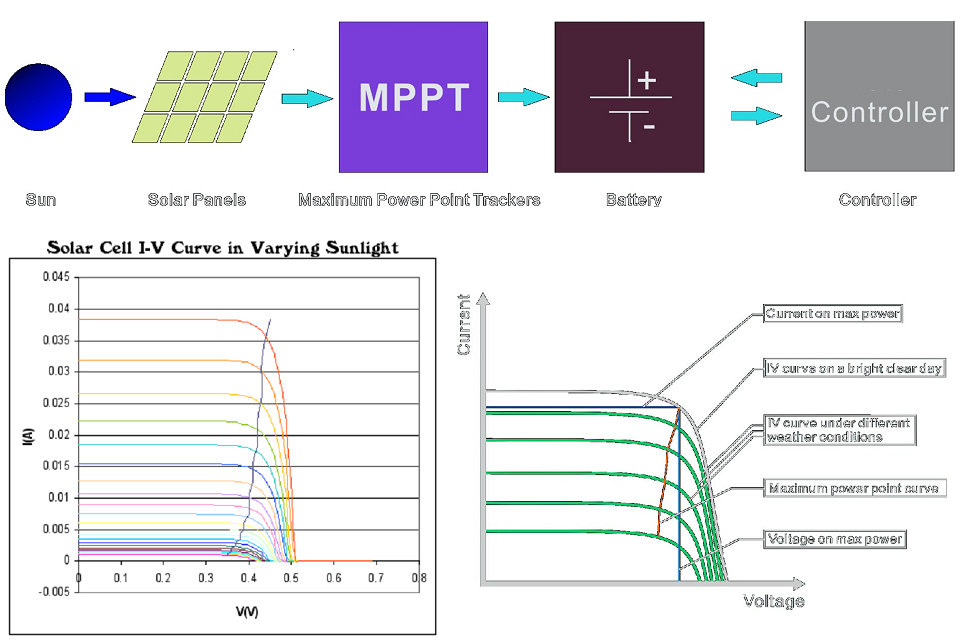
The power at the MPP (Pmpp) is the product of the MPP voltage (Vmpp) and MPP current (Impp).
Definitions
View of a uniformly illuminated solar module
The current-voltage diagram, as shown opposite, is typically applied in such a way that the technical current direction of the measured reverse current of the solar cell is shown. The current is thus applied positively in lighting, in contrast to the classic diode characteristic.
The ratio between the maximum power P MPP of the solar cell at the maximum power point and the product of open circuit voltage U L and short-circuit current I K is called fill factor FF :
with the function of the open circuit voltage of the solar module:

= Diode factor
= Open circuit voltage
= Saturation current
= Temperature voltage
= Photocurrent
The photocurrent rises slightly with increasing temperature and is usually neglected in practice. With increasing irradiation of the solar module, the current increases approximately proportionally, the power increases. The tension hardly changes. With increasing temperature, the voltage drops slightly, because the saturation current, also called dark current, increases.






The power resulting from the product of the voltage and the current thus decreases with constant irradiation and increasing module temperature. Typical values are -0.45% per Kelvin for crystalline silicon solar cells.
The following properties are identified in the current-voltage characteristic as recognition features for successful power adaptation:
It applies with performance adjustment in the MPP:
In the MPP, the IU characteristic touches the hyperbola with P = Pmpp = const.
The MPP divides its tangent into two equally long sections.
The diagonal in the rectangle of the point coordinates is parallel to the tangent.
The recognition characteristics are due to the local maximum performance property (dp / dU = 0). They are well suited for determining or checking the position of the MPPs in the characteristic curves even without a performance axis. They are also applicable if axis scaling is missing.

Consideration of several series connected solar modules with partial shading
The adjacent figures show a string of ten solar modules connected in series: The blue dashed curve represents the case in which all modules are uniformly irradiated. The black curve stands for the case that two of the ten modules are in the shade, and receive only 20% of the radiation compared to the other modules (by diffuse radiation).
It can be seen that in the shaded case, there is no longer just one performance maximum, but several. Highlighted in green is the “global MPP”, ie the actual point of maximum power. Marked in red is the “local MPP”, ie a local high point on the performance curve.
The cause of this process lies in the bypass diodes, which are integrated in the solar modules to protect the individual cells: At the local MPP, all modules are operated with the same low current that the shaded modules can still deliver (by diffuse irradiation). Only when the voltage is lowered or the current is increased, the bypass diodes of the shaded modules respond and close these module parts short, so bridge them. As a result, the string voltage is lower (the shaded modules are actually “missing” in the string), but the current is much higher, which explains the higher power at the global maximum.
Background
Photovoltaic cells have a complex relationship between their operating environment and the maximum power they can produce. The fill factor, abbreviated FF, is a parameter which characterizes the non-linear electrical behavior of the solar cell. Fill factor is defined as the ratio of the maximum power from the solar cell to the product of open circuit voltage Voc and short-circuit current Isc. In tabulated data it is often used to estimate the maximum power that a cell can provide with an optimal load under given conditions, P=FF*Voc*Isc. For most purposes, FF, Voc, and Isc are enough information to give a useful approximate model of the electrical behavior of a photovoltaic cell under typical conditions.
For any given set of operational conditions, cells have a single operating point where the values of the current (I) and voltage (V) of the cell result in a maximum power output. These values correspond to a particular load resistance, which is equal to V / I as specified by Ohm’s Law. The power P is given by P=V*I. A photovoltaic cell, for the majority of its useful curve, acts as a constant current source. However, at a photovoltaic cell’s MPP region, its curve has an approximately inverse exponential relationship between current and voltage. From basic circuit theory, the power delivered from or to a device is optimized where the derivative (graphically, the slope) dI/dV of the I-V curve is equal and opposite the I/V ratio (where dP/dV=0). This is known as the maximum power point (MPP) and corresponds to the “knee” of the curve.
A load with resistance R=V/I equal to the reciprocal of this value draws the maximum power from the device. This is sometimes called the ‘characteristic resistance’ of the cell. This is a dynamic quantity which changes depending on the level of illumination, as well as other factors such as temperature and the age of the cell. If the resistance is lower or higher than this value, the power drawn will be less than the maximum available, and thus the cell will not be used as efficiently as it could be. Maximum power point trackers utilize different types of control circuit or logic to search for this point and thus to allow the converter circuit to extract the maximum power available from a cell.
Implementation
When a load is directly connected to the solar panel, the operating point of the panel will rarely be at peak power. The impedance seen by the panel derives the operating point of the solar panel. Thus by varying the impedance seen by the panel, the operating point can be moved towards peak power point. Since panels are DC devices, DC-DC converters must be utilized to transform the impedance of one circuit (source) to the other circuit (load). Changing the duty ratio of the DC-DC converter results in an impedance change as seen by the panel. At a particular impedance (or duty ratio) the operating point will be at the peak power transfer point. The I-V curve of the panel can vary considerably with variation in atmospheric conditions such as radiance and temperature. Therefore, it is not feasible to fix the duty ratio with such dynamically changing operating conditions.
MPPT implementations utilize algorithms that frequently sample panel voltages and currents, then adjust the duty ratio as needed. Microcontrollers are employed to implement the algorithms. Modern implementations often utilize larger computers for analytics and load forecasting.
Classification
Controllers can follow several strategies to optimize the power output of an array. Maximum power point trackers may implement different algorithms and switch between them based on the operating conditions of the array.
Perturb and observe
In this method the controller adjusts the voltage by a small amount from the array and measures power; if the power increases, further adjustments in that direction are tried until power no longer increases. This is called the perturb and observe method and is most common, although this method can result in oscillations of power output. It is referred to as a hill climbing method, because it depends on the rise of the curve of power against voltage below the maximum power point, and the fall above that point. Perturb and observe is the most commonly used MPPT method due to its ease of implementation. Perturb and observe method may result in top-level efficiency, provided that a proper predictive and adaptive hill climbing strategy is adopted.
Incremental conductance
In the incremental conductance method, the controller measures incremental changes in PV array current and voltage to predict the effect of a voltage change. This method requires more computation in the controller, but can track changing conditions more rapidly than the perturb and observe method (P&O). Like the P&O algorithm, it can produce oscillations in power output. This method utilizes the incremental conductance (dI/dV) of the photovoltaic array to compute the sign of the change in power with respect to voltage (dP/dV).
The incremental conductance method computes the maximum power point by comparison of the incremental conductance (IΔ / VΔ) to the array conductance (I / V). When these two are the same (I / V = IΔ / VΔ), the output voltage is the MPP voltage. The controller maintains this voltage until the irradiation changes and the process is repeated.
The incremental conductance method is based on the observation that at the maximum power point dP/dV = 0, and that P = IV. The current from the array can be expressed as a function of the voltage: P = I(V)V. Therefore, dP/dV = VdI/dV + I(V). Setting this equal to zero yields: dI/dV = -I(V)/V. Therefore, the maximum power point is achieved when the incremental conductance is equal to the negative of the instantaneous conductance.
Technical procedures
“Shadow Management”
All of the methods described below are looking for the MPP in relatively small increments around the current performance maximum. This has the advantage that the solar generator is operated very close to the MPP most of the time (high “MPP adaptation efficiency”). The disadvantage is that the tracker in a partially shaded solar generator often remains at the local MPP (see above), without finding the way to the global MPP.
That is why most inverter manufacturers have now integrated an additional function, which runs at regular intervals (usually every 5-10 minutes) very quickly the entire characteristic of the solar generator to search for the global MPP. This feature is referred to as “shadow management” or “shadow management”, sometimes as a “sweeping function”, and does not replace continuous MPP tracking.
For the majority of manufacturers the function is activated ex factory, for others it can be activated in the menu. The yield loss due to the regular traversing of the characteristic curve (during which the generator is naturally not operated in the MPP) is for example given as “<0.2%”, for example the duration for traversing the characteristic curve is called 2 seconds.
It should be noted that the input voltage range of the inverter is a limiting factor: only if the number of unshaded modules is sufficient to reach the minimum input voltage of the inverter with these modules alone can it control the global MPP. Therefore, it is important to form sufficiently long strings for shading. (Formerly using shadows to form many short strings has become obsolete since the introduction of shadow management.)
Method of voltage increase
In the simplest way to find the maximum power, the MPP tracker continuously increases the load on the solar cell from zero, increasing the power output. If the power maximum is reached, the power begins to decrease again, which serves as a termination criterion for the search. This is an iterative process that constantly executes a microprocessor in the MPP tracker, so that even with changing irradiation conditions there is always an operation in the maximum power point. In the case of a partially shaded solar generator, the controller remains at the local maximum if it is (by chance) at it.
Method of load jumps
In the method of load jumps (English Perturb and observe), the controller periodically changes the load of the solar cell in small steps (load step) in a certain direction and then measures the power delivered by the solar cell. If the now measured power is higher than the measured power of the previous period, the controller maintains this search direction and makes the next power jump. If the measured power is smaller than that of the last measurement period, the controller changes the search direction and now executes load jumps in the opposite direction. In this way, the maximum power is constantly searched, with the result that the exact point of maximum power is never found, but it is approached to 1 load jump, which is not a problem if it is small enough. It creates a kind of oscillationaround the performance maximum. If the solar generator is partially shaded, the controller remains at the local maximum if it is (by chance) at it.
Rising Conductance
The idea of the method of incremental conductance is based on finding the maximum power based on the differential and the specific conductance of the solar cell. The maximum power point is characterized by the fact that the change in the power output in relation to the change in voltage becomes zero. Depending on which side of the power curve is the current load point, the power-voltage ratio increases or decreases with change of load, resulting in the following equations:
To the left of the maximum:
Right next to the maximum:


By transforming the equations, the following conditions are obtained for the controller, where I and U are the current measured values of the control period and dI, dU are the changes to the previous control period.
To the left of the maximum:
Right next to the maximum:

In the performance maximum:

Using this condition, the controller changes the load per control cycle step by step in the direction in which it approaches the condition of the desired maximum power. If the system fulfills this condition, the performance maximum was found and the search can be ended. If the output power changes due to the illumination intensity of the solar cell, the controller resumes the search.

In the case of a partially shaded solar generator, the controller remains at the local maximum if it is (by chance) at it.
Method of constant tension
The method of constant voltage is based on a relationship between the open circuit voltage of the solar cell and the voltage at which the solar cell gives the maximum power. Thus, it can be concluded on the basis of the knowledge of the open circuit voltage to the necessary for the removal of the maximum possible power load voltage and thus the load. Since the no-load voltage changes based on different parameters, the controller must periodically measure them during operation. For this purpose, the load is separated from the solar cell for the duration of the voltage measurement. On the basis of the now measured no-load voltage, the controller can calculate the optimum load and set it when reconnecting the load and the solar cell. Because the relationship between open circuit voltage and optimal load voltage is empiricalis determined in advance and depends on many parameters, the exact maximum power is not achieved. The algorithm is therefore in the strict sense, no one who is looking for the actual maximum power, and does not work in teilverschattetem solar generator.
Technical implementation
Software
In technical implementations of this method, a microcontroller or a digital signal processor usually performs one of the possible methods. In this case, the processor, the required measurement data provided by an analog-to-digital converter, with which this can perform the necessary calculations and passes the result by means of pulse width modulation to a DC-DC converter.
Hardware
Since the load of the solar cell is adjusted based on the load voltage, but the output voltage of the regulator should be almost constant, it requires a DC-DC converter to adjust the voltage differences and thus the load on the solar cell can. In the case of a photovoltaic system, it is quite possible for the voltage range of the optimum load voltage of the solar cell to move around the voltage of the accumulator to be charged. Thus, the input voltage of the DC-DC converter can be both larger and smaller than its output voltage. To meet this requirement, it requires a converter topology that satisfies this feature, such as the inverse converter, the split-pi converteror a higher-order converter (UC converter, SEPIC converter, double inverter).
Current sweep
The current sweep method uses a sweep waveform for the PV array current such that the I-V characteristic of the PV array is obtained and updated at fixed time intervals. The maximum power point voltage can then be computed from the characteristic curve at the same intervals.
Constant voltage
The term “constant voltage” in MPP tracking is used to describe different techniques by different authors, one in which the output voltage is regulated to a constant value under all conditions and one in which the output voltage is regulated based on a constant ratio to the measured open circuit voltage (VOC). The latter technique is referred to in contrast as the “open voltage” method by some authors. If the output voltage is held constant, there is no attempt to track the maximum power point, so it is not a maximum power point tracking technique in a strict sense, though it does have some advantages in cases when the MPP tracking tends to fail, and thus it is sometimes used to supplement an MPPT method in those cases.
In the “constant voltage” MPPT method (also known as the “open voltage method”), the power delivered to the load is momentarily interrupted and the open-circuit voltage with zero current is measured. The controller then resumes operation with the voltage controlled at a fixed ratio, such as 0.76, of the open-circuit voltage VOC. This is usually a value which has been determined to be the maximum power point, either empirically or based on modelling, for expected operating conditions. The operating point of the PV array is thus kept near the MPP by regulating the array voltage and matching it to the fixed reference voltage Vref=kVOC. The value of Vref may be also chosen to give optimal performance relative to other factors as well as the MPP, but the central idea in this technique is that Vref is determined as a ratio to VOC.
One of the inherent approximations to the “constant voltage” ratio method is that the ratio of the MPP voltage to VOC is only approximately constant, so it leaves room for further possible optimization.
Comparison of methods
Both perturb and observe, and incremental conductance, are examples of “hill climbing” methods that can find the local maximum of the power curve for the operating condition of the PV array, and so provide a true maximum power point.
The perturb and observe method requires oscillating power output around the maximum power point even under steady state irradiance.
The incremental conductance method has the advantage over the perturb and observe (P&O) method that it can determine the maximum power point without oscillating around this value. It can perform maximum power point tracking under rapidly varying irradiation conditions with higher accuracy than the perturb and observe method. However, the incremental conductance method can produce oscillations (unintentionally) and can perform erratically under rapidly changing atmospheric conditions. The sampling frequency is decreased due to the higher complexity of the algorithm compared to the P&O method.
In the constant voltage ratio (or “open voltage”) method, the current from the photovoltaic array must be set to zero momentarily to measure the open circuit voltage and then afterwards set to a predetermined percentage of the measured voltage, usually around 76%. Energy may be wasted during the time the current is set to zero. The approximation of 76% as the MPP/VOC ratio is not necessarily accurate. Although simple and low-cost to implement, the interruptions reduce array efficiency and do not ensure finding the actual maximum power point. However, efficiencies of some systems may reach above 95%.
MPPT placement
Traditional solar inverters perform MPPT for the entire PV array (module association) as a whole. In such systems the same current, dictated by the inverter, flows through all modules in the string (series). Because different modules have different I-V curves and different MPPs (due to manufacturing tolerance, partial shading, etc.) this architecture means some modules will be performing below their MPP, resulting in lower efficiency.
Some companies (see power optimizer) are now placing maximum power point tracker into individual modules, allowing each to operate at peak efficiency despite uneven shading, soiling or electrical mismatch.
Data suggests having one inverter with one MPPT for a project that has east and west-facing modules presents no disadvantages when compared to having two inverters or one inverter with more than one MPPT.
Operation with batteries
At night, an off-grid PV system may use batteries to supply loads. Although the fully charged battery pack voltage may be close to the PV panel’s maximum power point voltage, this is unlikely to be true at sunrise when the battery has been partially discharged. Charging may begin at a voltage considerably below the PV panel maximum power point voltage, and an MPPT can resolve this mismatch.
When the batteries in an off-grid system are fully charged and PV production exceeds local loads, an MPPT can no longer operate the panel at its maximum power point as the excess power has no load to absorb it. The MPPT must then shift the PV panel operating point away from the peak power point until production exactly matches demand. (An alternative approach commonly used in spacecraft is to divert surplus PV power into a resistive load, allowing the panel to operate continuously at its peak power point.)
In a grid connected photovoltaic system, all delivered power from solar modules will be sent to the grid. Therefore, the MPPT in a grid connected PV system will always attempt to operate the PV modules at its maximum power point.
Source from Wikipedia