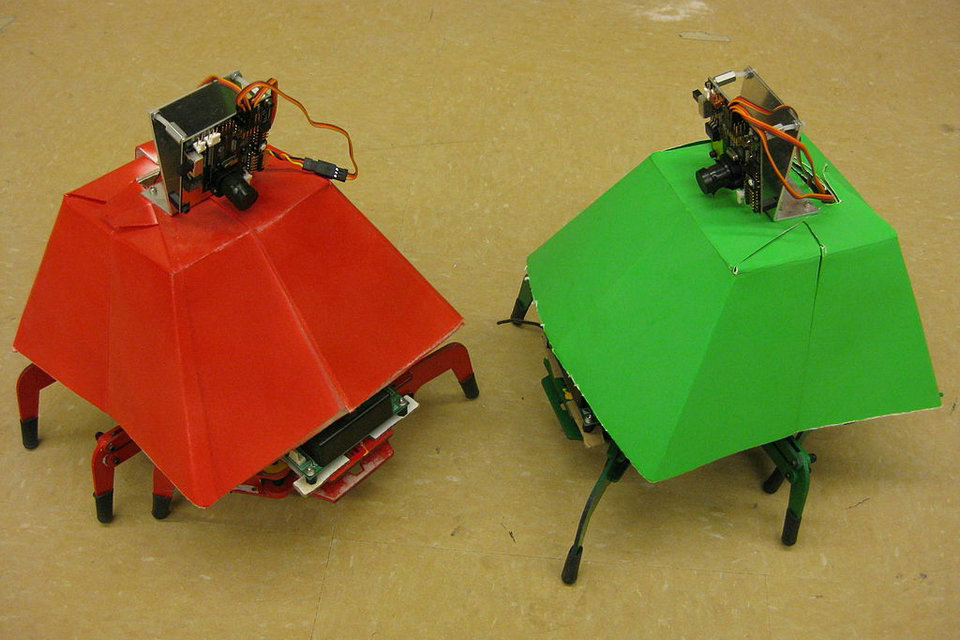
육각형 로봇 육각형 로봇은 6 개의 다리를 걷는 기계식 차량입니다. 로봇은 3 개 이상의 다리에서 정적으로 안정적 일 수 있기 때문에 육각형 로봇은 움직일 수있는 방법이 매우 다양합니다. 다리가 무력화되면 로봇이 여전히 걸을 수 있습니다. 또한, 모든 로봇의 다리가 안정성을 위해 필요하지는 않습니다. 다른 다리는 자유롭게 새로운 발 배치에 도달하거나 탑재량을 조작… 육각형 로봇
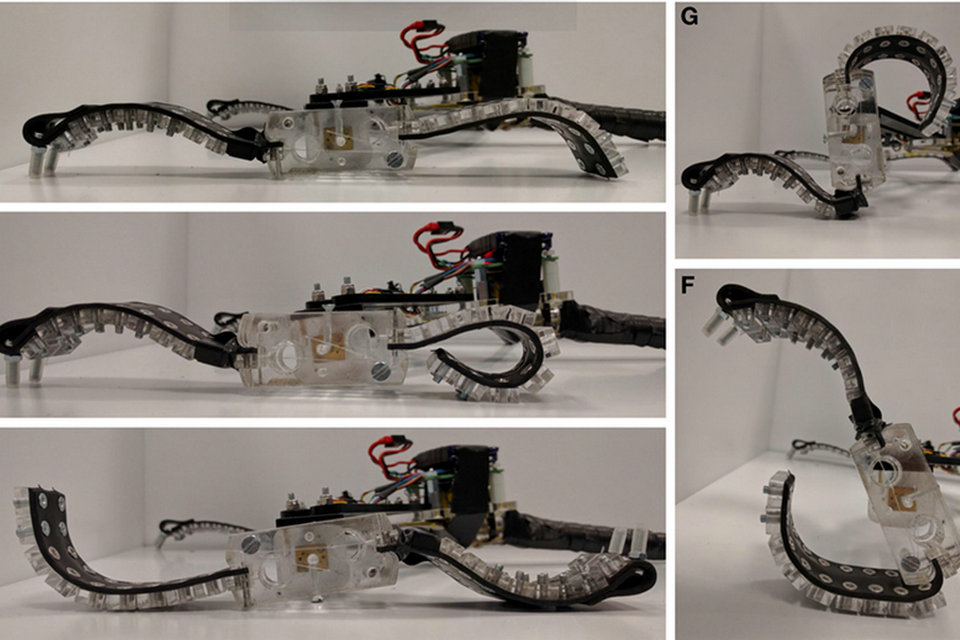
소프트 로보틱스 소프트 로보틱스 (Soft Robotics)는 살아있는 생명체에서 발견되는 것과 유사한 고도로 순응하는 물질로 로봇을 제작하는 로봇의 하위 분야입니다. 소프트 로봇은 살아있는 유기체가 움직이고 주변 환경에 적응하는 방식에서 크게 벗어납니다. 견고한 재료로 제작 된 로봇과는 달리, 소프트 로봇은 작업 수행시 유연성과 적응성을 향상시킬뿐만 아니라 사람 주위에서 작업 할 때 향상된 안전성을 제공합니다.… 소프트 로보틱스
수동 역 동성 수동 동력학은 액추에이터, 로봇 또는 생물체가 동력원 (예 : 배터리, 연료, ATP)에서 에너지를 끌어 오지 않을 때 동력 학적 동작을 의미합니다. 애플리케이션에 따라 전원 시스템의 수동 동역학을 고려하거나 변경하면 성능, 특히 에너지 경제성, 안정성 및 작업 대역폭에 큰 영향을 줄 수 있습니다. 전원을 사용하지 않는 장치는 “수동”으로 간주되며, 그 동작은 수동적 인… 수동 역 동성