발달 로봇 후 발형 로봇이라고도하는 발달 로봇 (DevRob)은 발달 메커니즘, 아키텍처 및 구체화 된 기계에서 새로운 기술과 새로운 지식을 평생 교육 할 수있는 제약 조건을 연구하는 것을 목표로하는 과학 분야입니다. 인간 어린이들과 마찬가지로, 학습은 누적되어 점차적으로 복잡해질 것이며, 사회적 상호 작용과 결합하여 세계를 스스로 탐험함으로써 생길 것으로 기대된다. 전형적인 방법 론적 접근법은… 발달 로봇
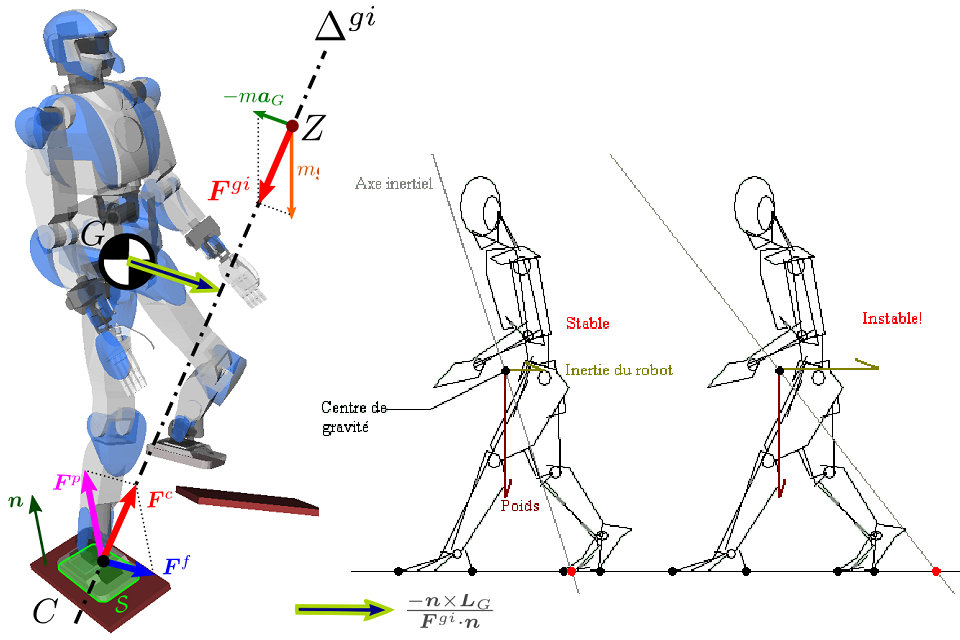
제로 점 제로 순간 지점은 인간형 로봇과 같은 다리 운동의 역 동성 및 제어와 관련된 개념입니다. 이것은 발의지면과의 접촉에서의 동적 반력이 수평 방향에서 어떤 모멘트도 일으키지 않는 점, 즉 수평 관성 및 중력의 합계가 0 (영)과 같은 점을 지정합니다. 이 개념은 접촉 영역이 평평하고 다리가 미끄러지지 않도록 충분히 높은 마찰을 가지고 있다고 가정합니다. 소개… 제로 점
(English) Robot locomotion 죄송합니다.이 항목은 English, Español, Deutsch, Français, Português, Русский, 中文, 日本語, العربية and हिंदी… (English) Robot locomotion