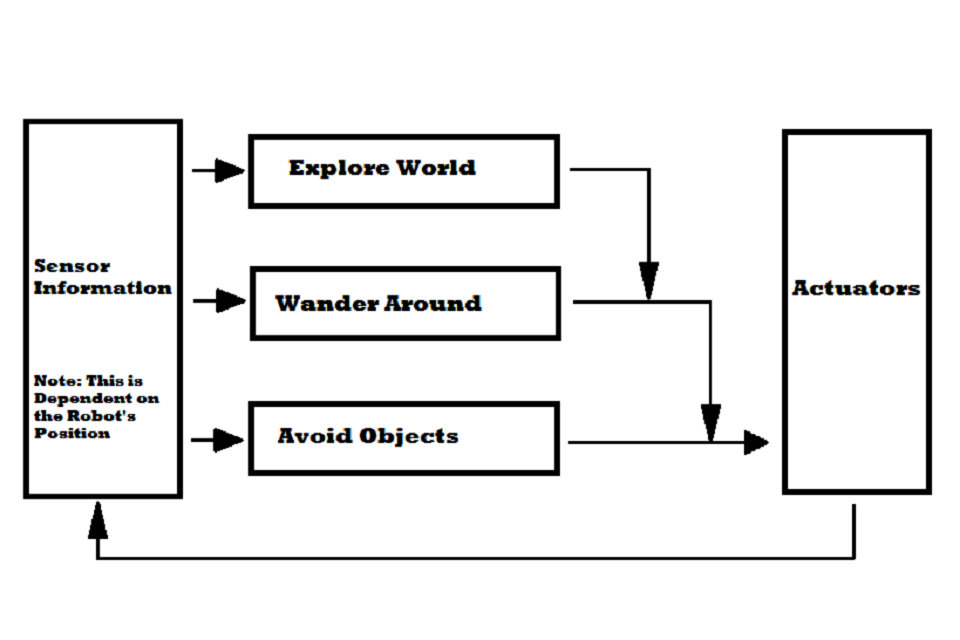
섭 소스 아키텍처 소집 아키텍처는 1980 년대와 90 년대에 매우 인기가 많은 행동 기반 로봇과 관련이있는 반응 로봇 아키텍처입니다. 이 용어는 1986 년 Rodney Brooks와 동료들에 의해 소개되었습니다. 개요 소집 아키텍처는 전통적인 AI 또는 GOFAI에 반대하여 제안 된 제어 아키텍처입니다. 섭섭 (subsumption) 아키텍처는 세계의 상징적 인 정신적 표현에 의한 행동을 안내하는 대신 감각… 섭 소스 아키텍처
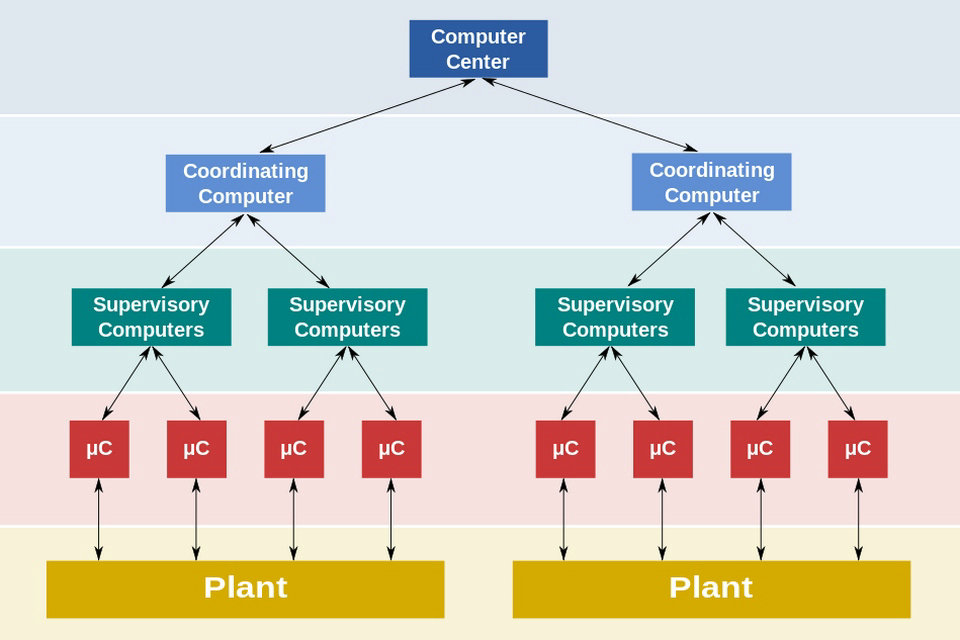
계층 적 제어 시스템 계층 적 제어 시스템은 일련의 장치와 관리 소프트웨어가 계층 트리에 배열 된 제어 시스템의 한 형태입니다. 트리 내의 링크가 컴퓨터 네트워크에 의해 구현 될 때, 그 계층 제어 시스템은 또한 네트워크 제어 시스템의 한 형태이다. 개요 복잡한 행동을하는 사람이 만든 시스템은 종종 계층 구조로 구성됩니다. 예를 들어, 명령 계층 구조에는… 계층 적 제어 시스템
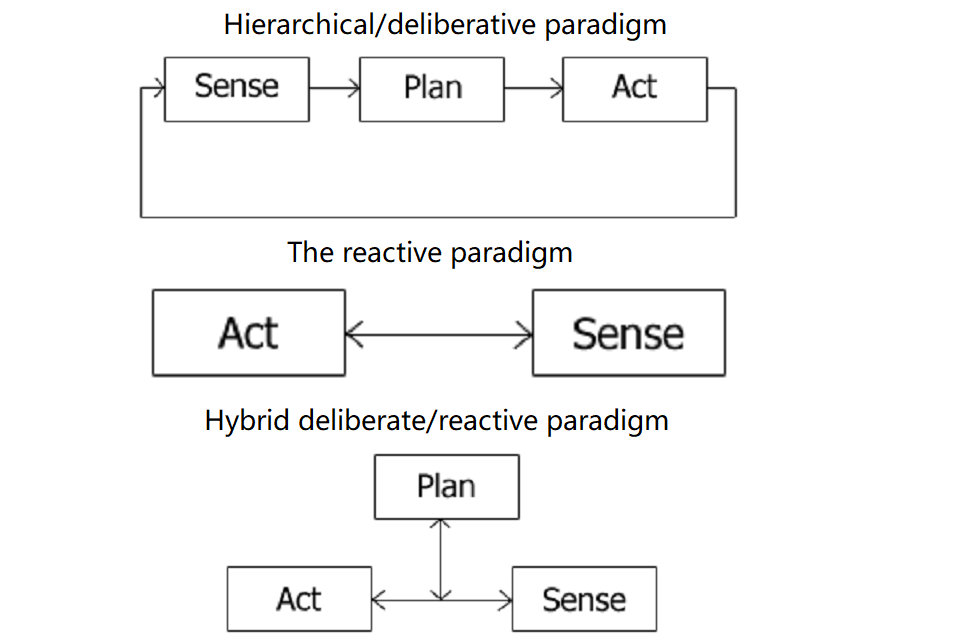
로봇 패러다임 로봇 공학에서 로봇 패러다임은 로봇이 어떻게 작동하는지에 대한 정신적 모델입니다. 로봇 패러다임은 로봇 공학의 세 가지 기본 요소 인 Sense Plan Act 간의 관계로 설명 할 수 있습니다. 또한 감각 데이터가 시스템을 통해 어떻게 처리되고 배포되는지, 그리고 의사 결정이 이루어지는 곳에서 설명 될 수 있습니다. 계층 적 / 심의 패러다임… 로봇 패러다임