サブサプレッションアーキテクチャ(Subsumption architecture)は、1980年代と90年代に非常に人気があったビヘイビアベースのロボットと密接に関連する反応的なロボットアーキテクチャです。この用語は、1986年にRodney Brooksらによって導入されました。摂取は、自律ロボットや他の場所でリアルタイムAIに広く影響を与えています。
概要
サブサウンションアーキテクチャは、従来のAI、またはGOFAIに対抗して提案された制御アーキテクチャです。包摂アーキテクチャは、世界の象徴的な精神的表現によって行動を導く代わりに、知覚情報を行動選択と親密かつボトムアップ方式で結びつける。
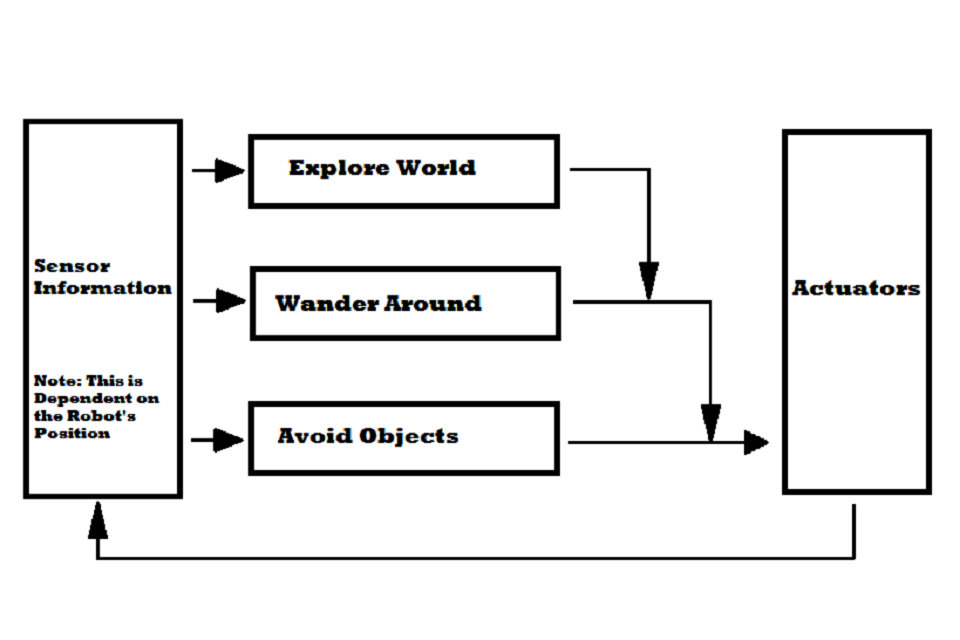
これは、完全な振る舞いを下位振る舞いに分解することによって行います。これらの下位振る舞いは、階層の階層に編成されています。各層は特定のレベルの行動能力を実装し、より高いレベルは実行可能な行動を創出するために、より低いレベルを包含することができる(より低いレベルからより包括的な全体に統合/結合する)。例えば、ロボットの最下層は「物体を避ける」ことができる。2番目のレイヤーは3番目のレイヤー「世界を探検する」の下を走る「さまよう」ことになります。ロボットは効果的に「徘徊」するために「物体を避ける」能力を持たなければならないため、上位層がより低いレベルの能力を利用するシステムを作り出す。全てのセンサ情報を受信する層は、並列に作業し、出力を生成します。これらの出力は、アクチュエータへの指令、または他の層を抑制または禁止する信号とすることができる。
プロパティ
身体的
エージェントは何らかの形で環境内に実装され、センサとアクチュエータを備えたボディを持ち、環境の変化を認識して反応します。
状況
エージェントは、相互作用する実際の環境の一部です。これはエージェントの動作に影響します。
インテリジェンス
エージェントの知性は、エージェントが実際の環境、彼の反応および刺激と衝突することによって主に形成される。
出現
システム全体のインテリジェンスは、緊急の方法、すなわち個々の部分の相互作用によって発生します。
明示的な知識表現なし
Subsoupアーキテクチャには、世界の明示的なモデルはありません。これは、ロボットが周囲の世界の概要を単純化していないことを意味します。利点は明らかです。エージェントは世界についての予測をしないので、予測できない環境でもうまく動作します。読み書きの時間を節約します。また、このモデルで使用されるアルゴリズムの時間も節約できます。また、現実世界と一致する必要のない世界モデルにも問題があります。しかし、それには欠点もあります。システムは純粋に反応性である。これは、世界で起きていることにのみ反応することを意味します。つまり、世界は自分が何をしたいのかを決定します。
配布する
動作は、さまざまなタスクを実行する有限オートマトン間に広がっています。その結果、彼らは環境内の競合事象に対応することができます。総行動は、有限オートマトンの近似合計です。有限オートマトンは互いに独立して動作するため、サブシステムアーキテクチャはパラレルおよび非同期です。すべての最終マシンは常に実行されており、独自のタイミングを持つことができるため、同期は必要ありません。
レイヤリング
地下構造は、各層が特定の挙動を実現し、1つ以上の有限オートマトンからなる層からなる。各有限オートマトンは独立したタスクを実行するため、サブシステムアーキテクチャはモジュラーと見なされます。各最終機械には多数の入出力ラインがあります。最終マシンは、互いにメッセージを送信し、データ構造を格納できるプロセッサです。プロセッサは非同期で動作し、同等に相互に同等です。彼らは入力を監視し、レポートを出力に送信します。最終マシンは、常に受信した最新のメッセージを考慮に入れます。このため、古いメッセージが処理される前に新しいメッセージが到着すると、メッセージが失われる可能性があります。レイヤー内に制御はなく、プロセッサー間に他の形式の通信はありません。つまり、共用メモリーはありません。各モジュールはそのタスクだけを気にします。より高い層はセンサへのアクセスを有し、入力を制限することによって、またはより低いレベルで特定の有限オートマトンの出力を抑制することによって、下位層の挙動に影響を及ぼす。
これは、上位層に下位層の役割が含まれるメカニズムです。
ナビゲーション
包摂アーキテクチャに基づく最も重要なエージェント能力は、世界中を移動し、オブジェクトの移動や移動を避けることです。ナビゲーションはエージェントが実行しなければならない主なタスクの1つであり、このタスクは(他の認知エージェントと比較して)非常に反応的です。ナビゲーションは、主に複数のレイヤーで実行されます。最下位のモジュールはオブジェクト(突然出現したものであっても)を回避し、上位レベルはエージェントを一定の方向に導き、障害を無視します。この組み合わせにより、明示的なルートプランを作成することなく、AからBに簡単にアクセスできます。
その他
エージェントはリアルタイムで動作し、主に実際の、動的で複雑な世界で動くように設計されています。
原産地の理由
包摂アーキテクチャの作成の理由の1つは、著者が自律移動ロボットの作成のための以下の要件とニーズに対処したいという事実でした。
多くのゴール
ロボットは、互いに衝突するより多くの目標を持つことができ、何らかの方法で対処する必要があります。例えば、ロボットは、彼の前の特定の地点に到達しようとすることができ、同時に彼は途中の障害物を避ける必要があります。可能な限り最短時間で何処に行く必要があり、同時にエネルギー資源を節約する必要があります。したがって、目的の重要性と優先度は相対的かつ文脈的に依存していることは明らかである。列車の停車時にはトラックを抜いて、その間にトラックスリーパーを確認することが重要です。
より多くのセンサー
ロボットは複数のセンサー(カメラ、赤外線センサー、音響センサーなど)を持つことができます。すべてのセンサーが誤動作する可能性があります。さらに、センサ値と必要な物理量との間に直接的な分析関係はないことが多い。いくつかのセンサは、それらが測定する領域において重複することがある。センサーがその範囲外で使用されると、センサーの故障や時には測定条件のために、しばしば不一致の読み取り値が発生する可能性があります。多くの場合、スコープの正確な分析特性は利用できません。ロボットは上記の条件で決定を下すことができなければなりません。
堅牢性
ロボットはロバストでなければなりません。一部のセンサーが故障すると、動作するセンサーにのみ依存して対応することができなければなりません。環境が大幅に変化した場合でも、ショックや無意味で、無意識のうちにさまようよりも、合理的な行動を取ることができるはずです。プロセッサーにエラーが発生しても処理を続けることができれば適切です。
スケーラビリティ
より多くのロボットがロボットに追加されると、より多くの処理能力が必要になります。そうしないと、元の機能が時間の経過とともに乱れることがあります。
ゴール
サブサプレッションアーキテクチャは、従来のAIとは大きく異なる視点からインテリジェンスの問題を攻撃します。ロビー・ブルックスは、ロボットや同様の意識的な心を表現したプロジェクトであるShakeyのパフォーマンスに失望し、無意識のマインドプロセスに似た、異なる知覚の概念に基づいてロボットを作成し始めました。このアプローチは、シンボル操作を介して人間の知能の側面をモデル化するのではなく、動的なラボやオフィス環境に対するリアルタイムの対話と実行可能な対応を目指しています。
目標は、4つの重要なアイデアによって知らされました。
Situatedness – 位置付けされたAIの主なアイデアは、ロボットが人間のような時間枠内でその環境に反応できることです。Brooksは、位置付けられた移動ロボットは、内部的なシンボルセットを介して世界を表現すべきではなく、このモデルで行動すべきであると主張している。代わりに、彼は「世界はそれ自身の最善のモデルです」と主張しています。つまり、モデリングとは対照的に、世界と直接対話するための適切な認識行動設定が使用できます。しかし、各モジュール/挙動はまだ世界をモデル化していますが、非常に低いレベルでは、感覚運動信号に近いです。これらのシンプルなモデルは、アルゴリズム自体にコード化された世界についてのハードコードされた仮定を必ず使用しますが、世界の行動を予測するためにメモリを使用するのではなく、
実施形態 – Brooksは、具体化されたエージェントの構築が2つのことを達成すると主張している。最初は、物理モデルでは機能しない理論モデルやシミュレートされたロボットではなく、統合された物理的な制御システムをテストして作成することです。2つめは、感覚データを意味のある行動に直接結合することによって、多くの伝統的なAIが遭遇する哲学的問題であるシンボル接地問題を解決することができるということです。「世界の根拠は退行している」、行動層の内部関係はロボットが認識する世界に直接的に根付いている。
知性 – 進化の進歩を見て、ブルックスは、知覚と移動性のスキルを開発することは、人間のような知性のための必要基盤であると主張する。また、AIの実行可能な出発点としてトップダウン表現を拒否することで、「インテリジェンスは世界との相互作用のダイナミクスによって決まる」と思われます。
出現 – 従来、個々のモジュールはそれ自身でインテリジェントであるとはみなされませんでした。このようなモジュールの相互作用は、エージェントとその環境を観察することによって評価されますが、通常はインテリジェントとみなされます(またはそうではありません)。したがって、「知性」は「オブザーバーの目の前にある」
上に概説したアイデアは、インテリジェンスの本質と、ロボット工学とAIの進歩をどのように育成すべきかについての議論の一部です。
レイヤーと拡張有限状態マシン
各層は、拡張有限状態機械(AFSM)であるプロセッサのセットによって構成され、この増補はプログラム可能なデータ構造を保持するインスタンス変数を追加する。レイヤーはモジュールであり、「さまよう」などの単一の行動目標を担当します。これらの行動モジュール内または間に中央制御は存在しない。すべてのAFSMは、関連するセンサーからの入力を連続的および非同期的に受信し、アクチュエータ(または他のAFSM)に出力を送信します。新しい信号が供給されるまでに読み取られなかった入力信号は、最終的に廃棄されます。これらの破棄された信号は共通であり、最も即時の情報を処理することによってシステムがリアルタイムで動作することができるため、パフォーマンスに役立ちます。
中央制御がないため、AFSMは抑制信号と抑圧信号によって互いに通信します。抑制信号は、信号がアクチュエータまたはAFSMに到達するのをブロックし、抑制信号は、層またはそのAFSMへの入力をブロックするか、またはそれらを置き換えます。このAFSM通信システムは、上位層がどのように上位層が下位階層に属しているか(図1を参照)と、アーキテクチャが優先順位とアクション選択仲裁を一般的にどのように扱うかです。
レイヤの開発は、直感的な進展に従います。最初に、最下層が作成され、テストされ、デバッグされます。その最低レベルが実行されると、第1層への適切な抑制および禁止接続を用いて第2層が作成され、取り付けられる。組み合わされた動作をテストしてデバッグした後、このプロセスは(理論的に)任意の数の動作モジュールに対して繰り返すことができます:16-20
特性
以上のことを踏まえ、著者らは、包含構造の基礎をなす手順に従うことにしました。彼らは、内部ロボット操作ではなく、制御システムの所望の外部表現に基づいてロボットを垂直に作成するという問題に対処しました。次に、彼らはいわゆる能力レベルを定義しました。コンピテンシーレベルとは、動いているすべての環境に対する必要なロボットの動作レベルの仕様です。能力のレベルが高いほど、より具体的な行動レベルを意味します。能力レベルの主な考え方は、所与のレベルの能力に対応する制御システムのレイヤを作成し、単に既存のセットに新しいレイヤを追加することが可能であるということです。
R. Brooksと彼のチームは、1986年に次のレベルの能力を定義しました。
物体との接触を避ける(動くか静止しているかにかかわらず)
1.オブジェクトと衝突することなく無意識に目を覚ます
2.到達範囲内の場所を検索して世界を探索する
3.環境の地図を作成し、ある場所から別の場所へ旅を計画する
4.静的環境における変化を記録する
5.識別可能なオブジェクトに関して世界を考え、これらのオブジェクトに関連するタスクを実行する
6.望ましい状態で世界の状態の変化を必要とする計画を策定し、実施する
7.世界のオブジェクトの振る舞いを考慮し、それに応じて修正する
著者らはまずゼロレベルコンピテンシーを達成し、徹底的に精査した完全なロボット制御システムを構築しました。制御システムの第1レベルと名付けられた別の層。システムのゼロ層からのデータを処理することができ、通常のビットレートを制限するゼロレベルの内部インタフェースにデータを挿入することもできます。原則として、ゼロレイヤーは継続して実行され、その上のレイヤーについては何も知らず、データパスを妨げることがあります。この層は、ゼロ層の助けを借りて第1レベルの能力に到達することができる。より高いレベルの能力を達成するために同じプロセスが繰り返されます。図3を見てください。最初のレイヤーが作成された瞬間、制御システムの機能部分は既に利用可能です。後で追加のレイヤーを追加することができ、システムを変更することはできません。
多くのゴール
個々のレイヤーは、個々のゴールを同時に処理できます。抑制メカニズムは、考慮されるアクションを仲介します。利点は、どの目標を取るべきかについての事前の決定がない可能性があることです。
複数のセンサー
すべてのセンサーは中央表示の一部ではない場合があります。非常に信頼性が高いと識別された中央表示にセンサ読み出しのみを追加することができます。しかしながら、同時に、センサ値がロボットによって使用されてもよい。異なるレイヤーがどのように扱われているかにかかわらず、他のレイヤーが処理して結果を使用して独自の目標を達成することができます。
堅牢性
複数のセンサが存在することは、その結果が合理的に使用できる場合には、明らかにシステムの堅牢性を増す。包摂アーキテクチャには堅牢性のもう一つの源があります。上層が追加されても、実証されている下層は引き続き実行されます。上位層は、代替データを積極的に妨害することによってのみ下位レイヤの出力を抑制することができ、適切な方法で結果を生成できない場合でも、低いレベルでは、低いレベルの能力でも合理的な結果が得られます。
拡張性
スケーラビリティに対処する明確な方法は、新しいレイヤーをそれぞれ独自のプロセッサー上で実行させることです。
ロボット
以下は、包含構造を利用したロボットのリストです。
アレン(ロボット)
ハーバート、ソーダ缶収集ロボット
Genghis、堅牢な六脚式歩行器
上記は、Elephants Do not Play Chessの他のロボットとともに詳細に説明されています。
強みと弱み
このアーキテクチャの主な利点は次のとおりです。
ターゲットドメイン内のリアルタイムシステムの反復開発とテストに重点を置いています。
限られたタスク特有の知覚をそれを必要とする表現された行動に直接結びつけることに重点を置く。そして
分配と並行制御に重点を置いて、知覚、制御、および行動システムを動物と同様の方法で統合する。
アーキテクチャの主な欠点は次のとおりです。
高度に分散された阻害および抑制系を介した適応可能な行動選択の設計の難点; 139-140および
言語を理解することからアーキテクチャを制限するように見える大きなメモリと象徴的表現の欠如。
包摂アーキテクチャが開発されたとき、包摂アーキテクチャの新しい設定とアプローチは、伝統的なAIが失敗した多くの重要な領域、すなわち動的環境とのリアルタイム相互作用に成功することを可能にしました。しかし、大容量の記憶域、記号表現、中央制御の欠如は、複雑な動作、詳細なマッピング、言語の理解を学ぶ上で不利になります。
拡張
1989年、Brooksは主に入力制限と有限オートマトンによる出力抑制の分野で、包含構造を開発しました。1991年、ブルックスはホルモンシステムの導入を思いつきました。個々の層は、ホルモンの存在または非存在によって抑制または制限されるべきである。1992年、Mataricは行動に基づいた建築というアイディアを思いつきました。このアーキテクチャは、堅牢性と反応性を失うことなく、世界の明示的な表現の欠如に対処する必要があります。