ロボット工学では、ロボットパラダイムは、ロボットの動作方法の精神モデルです。 ロボットパラダイムは、ロボット工学の3つの基本要素の間の関係によって記述することができます。 また、感覚データがどのように処理され、システムを介して配布され、どこで決定されるかによって記述することができます。
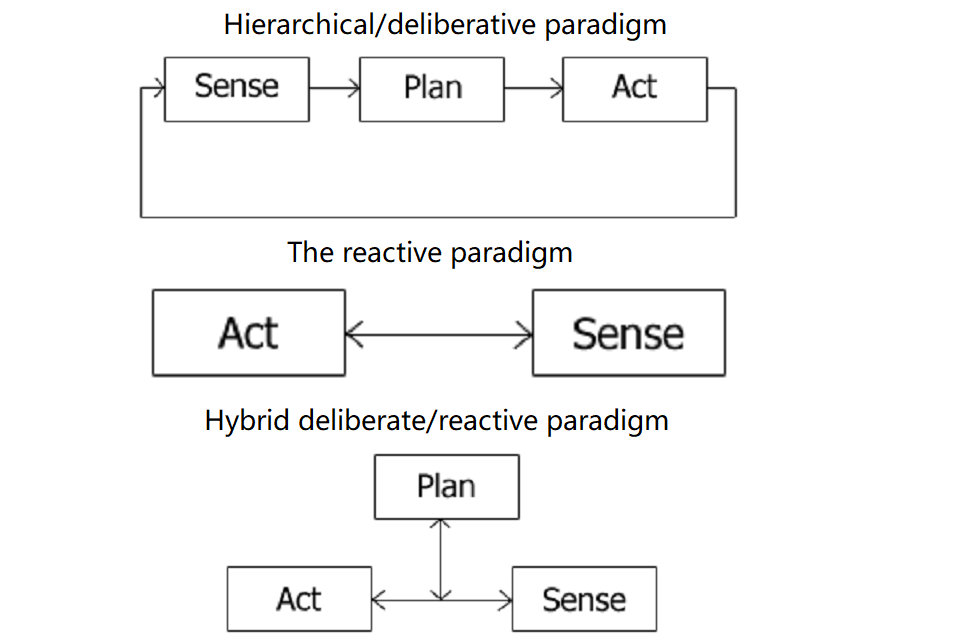
階層的/審議的パラダイム
ロボットはトップダウン方式で動作し、計画を重視します。
ロボットは世界を感知し、次の行動を計画し、行動する。 各ステップでロボットは明示的に次の移動を計画します。
すべてのセンシングデータは、1つのグローバルな世界モデルに集約される傾向があります。
反応パラダイム
組織のセンス – アクト型。
ロボットには、センス・アクト・カップリングの複数のインスタンスがあります。
これらのカップリングは、ローカルセンシングデータを取得し、他のプロセスが行っていることとは独立して実行するための最良のアクションを計算する、動作と呼ばれる並行プロセスです。
ロボットは行動の組み合わせを行います。
ハイブリッドの審議/反応パラダイム
ロボットはまず、タスクをサブタスク(「ミッションプランニング」とも呼ばれる)に分解する方法を計画し、次に各サブタスクを達成するための適切な動作を計画します(審議)。
その後、反応は反応的パラダイムに従って実行を開始します。
センシング組織はまた、階層的スタイルとリアクティブスタイルが混在しています。 センサデータは、センサを必要とする各動作にルーティングされますが、タスク指向のグローバルワールドモデルの構築のためにプランナが利用することもできます。