
圧電モータは、電界が印加されたときの圧電材料の形状の変化に基づく電気モータの一種である。 圧電モータは、圧電センサの逆圧電効果を利用し、圧電材料の変形または振動が電荷を生成する。 電気回路は、直線運動または回転運動を生じる圧電材料内で音響または超音波振動を発生させる。 1つの機構では、1つの平面内での伸びは、キャタピラーの動きと同様に、一連の伸びと位置保持を行います。
歴史
1947年に、チタン酸バリウムの最初のセラミック試料が得られ、この時点から、圧電モータの製造が理論的に可能になった。 しかし、このようなエンジンはわずか20年後に登場しました。 パワーモードで圧電トランスを調べると、キエフ工科大学VV Lavrinenkoの従業員は、その1人の回転をホルダーに発見しました。 この現象の理由を理解したので、1964年には最初の圧電回転モーターを作り、リニアモーターでリレーを駆動しました。 直接摩擦接触を有する第1のモータの場合、プッシャを介して圧電素子とロータとを機械的に接続した非可逆モータ群を形成する。 これに基づいて、0〜10000rpmの速度範囲と0〜100Nmのトルク範囲をカバーする数十種類の非可逆モーターの設計を提供します。 2つの非可逆モーターを使用して、Lavrinenkoはもともと逆の問題を解決します。 1つのモーターのシャフトに一体的に、第2のモーターを取り付けます。 彼は、圧電素子のねじり振動を励起するモーターリソースの問題を解決します。
国内外の同様の研究に先駆けて、Lavrinenkoは発電機のモードでの作業の可能性を排除することなく、圧電モータの構築の基本原理のほとんどすべてを開発しました。
開発の約束を前提に、Lavrinenkoは彼の提案を実行するのを手伝った共著者とともに、数多くの著作権証明書と特許を擁護しています。 Lavrinenkoの指揮下にある圧電モータの支店は、キエフ工科大学で創設され、VCR Electronics-552の世界初の圧電モーターの連続生産が計画されています。 続いて、Dnepr-2スライドプロジェクタ、ムービーカメラ、ボールバルブドライブなどのモータが製造されています。1980年に、Energiaは圧電モータに関する最初の書籍を出版しました。 Kaunas Polytechnic Instituteにおけるプロモーターの開発 Ragulskis KM。 過去に大学院生であったVishnevsky VS(Lavrinenko)はドイツに去り、PHyzical Instrymentでリニア圧電モータの導入を続けています。 圧電モータの研究開発はソ連を超えて進んでいます。 日本と中国では、アメリカでは超小型回転エンジンの開発が積極的に進められています。
建設
超音波エンジンは、電力特性において同様の電磁モータと比較して、著しく小さい寸法及び質量を有する。 接着剤化合物を含浸させた巻線がないため、真空状態での使用に適している。 超音波エンジンは、その設計上の特徴のために、供給電圧が存在しない場合に、顕著な自己制動モーメント(最大トルクの50%まで)を有する。 これにより、特別な手段を使用することなく、非常に小さな離散的な角変位(単位は秒単位)が可能になります。 この特性は、圧電モーターの準連続的な性質に関連している。 実際、電気振動を機械振動に変換する圧電素子は、一定ではなく、共振周波数の交番電圧によって駆動される。 1つまたは2つのパルスを適用すると、回転子の非常に小さな角変位を得ることができます。 例えば、圧電素子のプレートに単一パルスを印加する場合、2MHzの共振周波数及び0.2-6回転/秒の動作周波数を有する超音波エンジンのいくつかのサンプルは、理想的にはロータ1の角変位を与える/ 9.900.000-1 / 330.000円の大きさ、すなわち0.13-3.9角秒。
このようなエンジンの重大な欠点の1つは、固体物質(例えば、砂)の摂取に対するかなりの感度である。 一方、圧電モータは、液体媒体、例えば水中または油中で作動することができる。
機能原理
一般的に使用される原則は次のとおりです。
走行波モータ
立上り波モータ
スティックスリップエンジンとも呼ばれる慣性モータ
「虫よけ」エンジン
ボーダーモーター
進行波モータおよび定在波モータおよび関連するタイプは、圧電ソリッドステートアクチュエータによって生成される振動によって駆動されるので、振動モータとも呼ばれる。 対照的に、慣性モータ、インチワームモータ、およびステッパモータは、それらの運動が明確に画定されたステップに分割されるので、(圧電)ステッパモータと呼ばれる。 しかし、この分類は、慣性モーターの場合に特に当てはまるわけではない。なぜなら、その原理が共振振動に基づく慣性モーターも存在するからである。
「可撓性の」固定子(薄いバイモルフ板、薄い板、より大きな振動の振幅およびより低い共振周波数)は、機械的な進行波を形成する超音波振動を発生させる高周波の交流電圧が印加され、ローターの近くにあるプッシュ(フック)。 左に動くとき、プッシャーはくさび形です。 右に動くとき、それはくさび形です。 プッシャーを備えたすべての圧電モーターは、この原理に基づいて動作します。 プッシャーの数を増やすことで、大きな出発点を持つモーターを作成することができます。
原理の単純さは実装が難しい。 また、通常の電動モーターを実際に「膝の上に」作ることができれば、洗練された機器なしで80〜90%の高効率の超音波エンジンを作ることはできません。 しかし、効率を無視すると(50-60%になる)、自宅で超音波モータを作ることができます。
回転子と接触する圧電素子の全ての点が、楕円形に近い軌道に沿って動くべき原理は、回転する圧電モータの仕事の基礎である。 このために、2つのタイプの互いに直交する振動がピエゾ素子において同時に励起される。 これは、互いに横方向の縦方向、曲げ方向、せん断方向およびねじり振動の任意の組み合わせとすることができる。 唯一の重要なことは、これらの振動を機械的に接続すべきではないことです。つまり、ある振動からのエネルギーが別の振動に伝達されるべきではありません(正方形のプレートでは、その側面に沿った縦振動の励起は、反対側では、これは変動の一例です)。 振動が機械的に切り離されていれば、それらの間に任意の位相シフトを得ることができる。 圧電モータの最適値は90度の位相シフトです。 最も単純なモータ(図3)では、圧電素子の長手方向の波長が電気的に励起され、圧電素子の端部がロータ表面に沿って移動するときに横波、すなわち屈曲が励起される。 圧電素子の寸法は、機械的な共振及び縦振動及び横振動が存在するように選択される。 それで効率は80%を超えることができます。 このようなモータの場合、ロータとステータとの間の摩擦接触がラインに沿って発生し、その寿命が低下する。 電極のみで励起する(1)、図。 4ピエゾ素子(2)のねじり振動、および他の電極(3) – 縦振動では、フラットな摩擦接触を持つモーターを作り出すことができます。 リソースの問題Lavrinenkoはこのように解決します。
走行波モータ
走行波モータは大部分の回転モータ用です。 それらは、固定部である固定部と、可動部である回転部とからなる。 ステータは、印加されたAC電圧を機械的振動に変換する少なくとも2つの圧電トランスデューサを含む。 トランスデューサは、位相がずれて励起され、ステータ上に進行波を生成する。 これは、運動中のステータとロータとの間の摩擦接触上を移動する。 高い振動振幅および速度を達成するために、ステータは、通常、超音波作動領域内の周波数で共振する。 線形進行波モータにおける進行波は、生成するのがはるかに高価であり、そのため、線形進行波モータはまだ市販されていない。 走行波モータは、特にカメラレンズでの使用により、より大きな顕著性を達成している。 この例は、「進行波モータ」の記事に記載されています。
スタンディングウェーブモーター
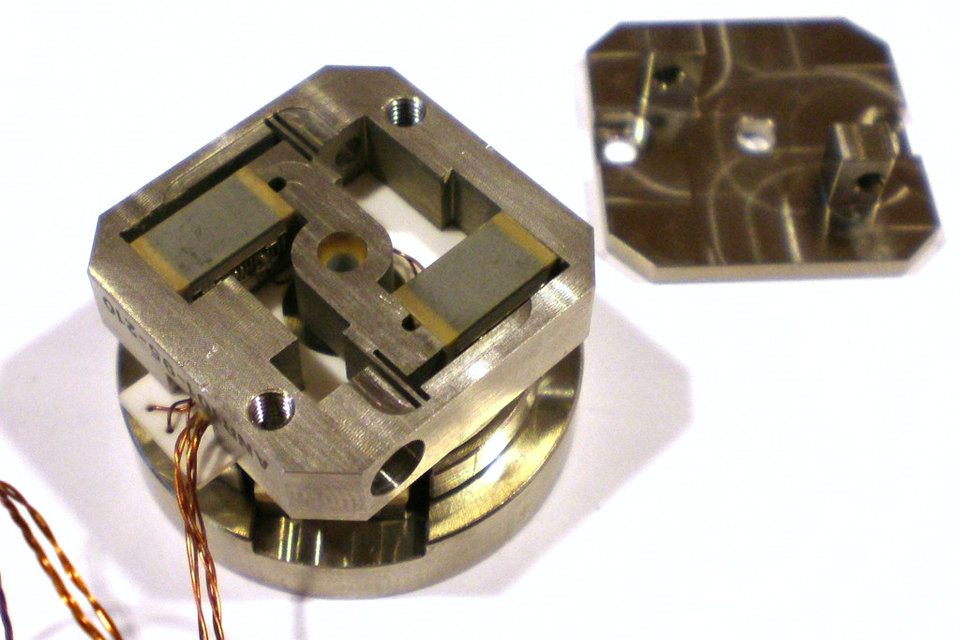
定在波モータでは、定常波の形態の振動が圧電固体アクチュエータによってステータに発生される。 結果として生じる1つ以上の接触点のほとんどが楕円形の運動は、ロータを駆動する。 高い振動振幅で接触が一時的に中断され、衝撃が発生することがあります。 立上り波モータは、多くの異なる形状を有し、回転運動および直線運動の両方を生成することができる。 左の写真は、4つのピエゾアクチュエータによって駆動される回転定在波モータを示しています。
慣性モーター
慣性モーターは、動かすべき物体の慣性力を用いて、それを摩擦接触の上に動かす。 古典的な慣性モータでは、摩擦接触におけるスローモーションのフェーズは静止摩擦に曝され、急速なモーションフェーズでは、慣性力は非常に大きくなり、部品が互いに摺動する。 静止摩擦と滑り摩擦との間のこの変化は、「スティックスリップモータ」(「スティックスティック」および「滑り」=滑り)(スティックスリップ効果を参照)に広範な名称をもたらした。 しかし、拘束フェーズなしで動作する慣性モーターもあります。 これらのエンジンでは、駆動段階の間、部品は互いに摺動する。
圧電イナーシャモーターは非常に簡単です。 最も単純なケースでは、それらは、反対の例のように、3つのコンポーネントのみからなる。 多くの形態の慣性モータは、とりわけ、モータ駆動固体アクチュエータが固定されているか、エンジンと共に動いているかによって区別することができる。 ほとんどの慣性モーターは、数kHzまでの低周波数で動作します。 しかしながら、いくつかの共振慣性モータは、超音波範囲でも動作する。 慣性モーターはzです。 B.デジタルカメラでの顕微鏡と画像の安定化におけるサンプルの位置決めに使用されます。
虫よけモーター
いわゆる「インチワーム」モーターは、「クランピングとスライド」の原則に従って動作します。 キャタピラのような動きの原則は、今日このタイプのエンジンを今日一般に「Inchworm」というブランド名の名前で記述しています(キャタピラー英語の場合)。 右側の図に示されているモーターは、2つのクランプアクチュエーターと1つのフィードアクチュエーター(上部と下部)で構成されています。 クロック駆動のため、「インチワーム」モータは、可聴範囲内の低周波数で動作する。 彼らは大きなパワーと精度のために設計されていますが、高速ではありません。
ウォーキングモーター
「インチワーム」モータとは異なり、いわゆるステッパモータでは、クランプと駆動が同じアクチュエータであり、異なるアクチュエータではありません。 隣接する画像に示されている例では、バイモルフ設計の2つの曲げアクチュエータ(2つのアクチュエータと中間層)がこの目的のために使用されています。 先端の接触点は、自由な動きで楕円運動を行う。 実際には、これらのトラックの一部を、駆動されるべき要素である「ローター」に対して押し付け、それを所望の方向に押す。 アクチュエータの位相がずらされた動きのために、常に少なくとも1つがロータをクランプして、それが決して自由に動かないようにする。
現在のデザイン
1つの駆動技術は、圧電セラミックを使用してステータを押す。 これらの圧電モータは、3つの結晶のグループを使用します.2つのロックと、モーターのケーシングまたはステータのどちらかに永久に接続する動機(両方ではない)です。 他の2つの間に挟まれたモチベーショングループは動きを提供します。 これらの圧電モータは基本的にステッピングモータであり、各ステップはロックタイプに基づいて2つまたは3つの動作を含む。 これらのモーターはインチワームモーターとしても知られています。 別の機構は、弾性表面波(SAW)を用いて線形または回転運動を生成する。
第2の駆動タイプであるスケグルモータは、ナットに直角に結合された圧電素子を使用する。 それらの超音波振動は中央のリードスクリューを回転させる。 これは直接駆動メカニズムです。
ロック機構
第1のタイプの圧電モータの非動力学的挙動は、2つの選択肢のうちの1つである。 通常ロックされたモーターに電力が供給されていない場合、スピンドルまたはキャリッジ(それぞれ回転タイプまたは直線タイプ用)は外力によって動かない。 通常フリーのモーターのスピンドルまたはキャリッジは外力によって自由に動く。 しかしながら、両方のロックグループが静止して動力を供給される場合、通常フリーのモータは動力を供給することなく外力に抵抗する。
機械式ラッチと水晶の組み合わせは同じことをすることができますが、モーターの最大ステッピング速度を制限します。 駆動ねじがナットのねじによってロックされるので、第2のタイプのモータの非動力特性はロックされる。 したがって、それは電源オフでその位置を保持する。
ステッピングアクション
ロッキングタイプにかかわらず、ステッピングタイプの圧電モーター(リニアおよびロータリー)は、同じメカニズムを使用して動きを作り出します。
最初に、1つのロッククリスタルグループがアクティブになり、片側をロックし、ピエゾクリスタルの「サンドイッチ」の反対側をロック解除します。
次に、モチベーションクリスタルグループがトリガされ、保持されます。 このグループを拡張すると、ロックされていないロックグループがモーター経路に沿って移動します。 これは、モーターが動く唯一の段階です。
その後、ステージ1でトリガされたロッキンググループが解放されます(通常はロッキングモーターで、他のトリガーではロックモーター)。
その後、モチベーショングループが解放され、「後ろに」ロックグループが取り消されます。
最後に、両方のロックグループがデフォルトの状態に戻ります。
ダイレクトドライブアクション
直接駆動圧電モータは、連続的な超音波振動によって運動を生成する。 その制御回路は、通常、40kHz〜200kHzの超音波周波数のねじ山付き管の曲げ共振周波数に一致する2チャネルの正弦波または方形波を圧電素子に印加する。 これにより、ねじを駆動する軌道運動が生じる。
速度と精度
圧電結晶の成長および形成は、十分に発達した産業であり、所定の印加電位差に対して非常に均一で一貫した歪みを生じる。 これは、歪みの微小スケールと相まって、圧電モータに非常に細かいステップを作る能力を与える。 製造業者はナノメータースケールの精度を要求しています。 高い応答速度と高速な結晶歪みにより、5MHz以上の非常に高い周波数でステップを実行できます。 これは、約800mm /秒、または約2.9km / hの最大線速度を提供する。
圧電モータのユニークな機能は、強い磁場で動作する能力です。 これは、核磁気共鳴(nuclear magnetic resonance)アンテナのような従来の電磁モータを使用することができない用途への有用性を拡大する。 最高動作温度は、使用される圧電セラミックのキュリー温度によって制限され、+ 250℃を超えることがあります。
他のデザイン
シングルアクション
非常に簡単なシングルアクションステッピングモーターは、圧電結晶で作ることができます。 例えば、柔らかい材料(ポリウレタンゴムのような)の薄い層で被覆された硬質かつ剛性のロータスピンドルでは、一連の傾斜圧電トランスデューサを配置することができる。 (図2参照)。 制御回路がトランスデューサの1つのグループをトリガすると、ロータを1ステップ押します。 このデザインは、より複雑なデザインほど小さくないか正確なステップを作ることはできませんが、より高速になり、製造コストが安くなります。
特許
振動駆動モータを開示する最初の米国特許は、「振動エネルギーを送達するための方法および装置」(米国特許第3,184,842号、Maropis、1965)であり得る。 Maopisの特許は、「共振結合要素の縦振動がトロイド型共振端子要素のねじり振動に変換される振動装置」を記載している。 最初の実用的な圧電モーターは、1964年に始まったピエゾエレクトロニクス研究所のV. Lavrinenkoによってキエフポリテクニック研究所(USSR)によって設計され、製造された。 この技術の初期開発における他の重要な特許には、
“電気モーター”、V. Lavrinenko、M. Nekrasov、特許ソ連第217509号、優先権は1965年5月10日である。
「ピエゾモーター構造」(米国特許第4,019,073号、Vishnevskyら、1977年)
「ピエゾ電気駆動ねじり振動モータ」(米国特許第4,210,837号、Vasiliev他、1980年)
利点
これらのタイプのエンジンの最も重要な利点の1つは、任意の回転速度に対して直接駆動が可能であることである。 建設的な点で、ドライブは大幅に簡素化され、場合によっては効率が大幅に向上し、ギアボックスを「食べる」。 どのような流れ領域(図5)でボールバルブ駆動装置を開発し、その大量生産を可能にするのがこの特性です。
スピードに関しては、圧電モータは等価ではありません。 これは、電磁モータの場合のように、その力が回転子の質量に依存しないという事実による。 ミリ秒の数分の1の間、それらは必要な速度を獲得し、例えば燃料インジェクタのような高価な圧電アクチュエータであっても競争することができる。
ピエゾモーターの最小ステップは、1/8秒の1000分の1にすることができます。 それらのベースに基づいて、ナノメートル範囲で動作する顕微鏡ガイドが作成される。 低速の家電製品の場合、ギアボックスの不足のために、彼らはノイズがなく、持っていない焼かれた巻線から臭いを放ちません。 分離された状態でのロータの抑制、形態の可塑性、製品に一体化する能力も有用である。
圧電モータは、完全に非磁性材料で作ることができる。 その中には、高温(最高300℃)、真空中、強い磁場、高い放射線の条件下、水や油に浸された状態でも使用できます。
応用
超音波エンジンは、最小限の角度および直線変位を達成する必要がある技術の分野において首尾よく使用することができる。 例えば、天文学では、宇宙研究において、非常に小さな物体(星)に対して正確な方向付けが要求される。 荷電粒子の加速器において、ビームを厳密に特定された幾何学的座標に保つことが必要である。 結晶構造(ゴニオメーターヘッドの向き)を研究する際の研究では、 ロボット工学など
圧電モータに基づいて、アンテナおよび監視カメラのドライブ、電気シェーバー、切削工具のドライブ、テープ駆動機構、タワーストリートクロック、ボールバルブの駆動、広告プラットフォームの低速(2rpm)駆動、電動ドリル、子供のおもちゃおよび可動人工装具、天井ファン、ロボットなどのドライブ
波動圧電モータは、一眼レフカメラ用のレンズにも使用されています。 このような異なるメーカーのレンズの技術名称のバリエーション:
キヤノン – USM、超音波モーター;
ミノルタ、ソニー – SSM、SuperSonic Motor;
ニコン – SWM、サイレントウェーブモーター
オリンパス – SWD、超音速波ドライブ;
パナソニック – XSM、余分なサイレントモーター;
Pentax – SDM、超音速ドライブモーター;
シグマ – HSM、ハイソニックモーター;
Tamron – USD、超音波サイレントドライブ、PZD、ピエゾドライブ
Samsung – SSA、超音波アクチュエータ
工作機械業界では、これらのエンジンが切削工具の超精密位置決めに使用されています。
例えば、マイクロドライブカッターを備えた機械を回転させるための特別な工具ホルダーがあります。