最大パワーポイントトラッキング(MPPT)または場合によってはパワーポイントトラッキング(PPT)は、風力タービンおよび太陽光発電(PV)ソーラーシステムで一般的に使用される技術で、あらゆる条件下で電力抽出を最大化します。
太陽光発電は主にカバーされていますが、原則は一般的に可変出力の電源に適用されます。たとえば光パワー伝送や熱電発電などです。
太陽光発電システムは、インバータシステム、外部グリッド、バッテリバンク、または他の電気負荷との関係に関して、多くの異なる構成で存在する。 しかし、太陽光発電の最終的な目的地にかかわらず、MPPTが取り組む中心的な問題は、太陽電池からの電力伝送の効率は、太陽電池パネルに当たる太陽光の量と負荷の電気的特性の両方に依存するということである。 太陽光の量が変化すると、最も高い電力伝達効率を与える負荷特性が変化するので、負荷特性が変化したときにシステムの効率が最適化され、電力伝送が最高の効率で維持される。 この負荷特性は最大電力点(MPP)と呼ばれ、MPPTはこの点を見つけてそこで負荷特性を維持するプロセスです。 電気回路は、光起電力セルに任意の負荷を与え、電圧、電流、または周波数を他のデバイスまたはシステムに適合させるように設計することができ、MPPTは、セルに与えられる最良の負荷を選択する問題を解決する最も使用可能なパワーアウト。
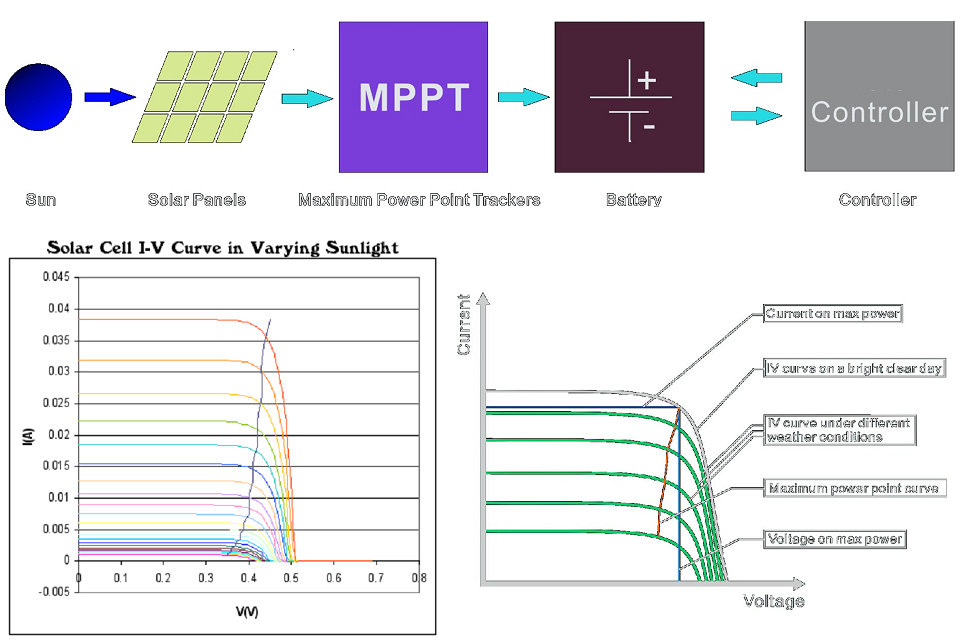
太陽電池は、温度と全抵抗との間に複雑な関係があり、I-V曲線に基づいて分析できる非線形出力効率を生じる。 MPPTシステムの目的は、PVセルの出力をサンプリングし、適切な抵抗(負荷)を加えて特定の環境条件で最大の電力を得ることです。 MPPTデバイスは、電力グリッド、バッテリ、またはモータなどのさまざまな負荷を駆動するための電圧または電流変換、フィルタリング、およびレギュレーションを提供する電力コンバータシステムに組み込まれています。
ソーラーインバータは、DC電力をAC電力に変換し、MPPTを組み込んでもよい。このようなインバータは、ソーラーモジュールからの出力電力(IV曲線)をサンプリングし、最大電力を得るために適切な抵抗(負荷)を印加する。
MPP(Pmpp)の電力は、MPP電圧(Vmpp)とMPP電流(Impp)の積です。
定義
一様に照らされたソーラーモジュールの図
反対に示されているように、電流 – 電圧線図は、典型的には、測定された太陽電池の逆電流の技術的な電流方向が示されるように印加される。 したがって、電流は、従来のダイオード特性とは対照的に、照明において積極的に印加される。
最大電力点における太陽電池の最大電力P MPPと、開回路電圧ULと短絡電流IKの積との間の比は、フィルファクタFFと呼ばれる:

ソーラーモジュールの開回路電圧の関数:
=ダイオード係数
=開回路電圧
=飽和電流
=温度電圧
=光電流






光電流は温度が上昇するとわずかに上昇し、実際には通常無視される。 ソーラーモジュールの照射が増加するにつれて、電流はほぼ比例して増加し、電力は増加する。 張力はほとんど変化しない。温度が上昇すると、暗電流とも呼ばれる飽和電流が増加するため、電圧がわずかに低下します。
このように、電圧と電流との積から生じる電力は、一定の照射およびモジュール温度の上昇と共に減少する。 結晶シリコン太陽電池の典型的な値はケルビンあたり-0.45%です。
次の特性は、電流 – 電圧特性において、電力適応を成功させるための認識特徴として識別される。
MPPのパフォーマンス調整に適用されます。

MPPでは、IU特性は双曲線にP = Pmpp = constで接触します。
MPPは、接線を2つの等しい長さのセクションに分割します。
点座標の矩形内の対角線は接線に平行です。
認識特性は、局所最大性能特性(dp / dU = 0)によるものである。 性能軸がなくても特性カーブ内のMPPの位置を決定または確認するのに適しています。 軸スケーリングがない場合にも適用されます。
部分遮光を有するいくつかの直列接続ソーラーモジュールの考察
隣接する数字は、直列に接続された10個の太陽電池モジュールの列を示す。青色の破線は、すべてのモジュールが均一に照射される場合を表す。 黒い曲線は、10個のモジュールのうちの2個が日陰にあり、他のモジュール(拡散放射による)と比較して20%の放射線しか受けない場合を表しています。
陰影のあるケースでは、もはや1つの性能最大値ではなく、複数の性能最大値が存在することが分かる。 緑色で強調表示されているのは、「グローバルMPP」、つまり実際の最大電力点です。 赤色でマークされているのは、「ローカルMPP」です。つまり、パフォーマンスカーブ上のローカルポイントです。
このプロセスの原因は、個々のセルを保護するためにソーラーモジュールに組み込まれたバイパスダイオードにあります。ローカルMPPでは、すべてのモジュールは、影付きモジュールが引き続き(拡散照射によって) 。 電圧が低下したり、電流が増加した場合にのみ、遮光されたモジュールのバイパスダイオードが応答してこれらのモジュール部品を短絡するので、ブリッジしてください。結果として、ストリング電圧はより低く(陰影付きモジュールは実際には文字列内に「欠落」している)、電流はずっと高くなり、全体的な最大値でのより高い電力が説明される。
バックグラウンド
光電池は、それらの動作環境とそれらが生成することができる最大電力との間に複雑な関係を有する。 フィルファクタ(FF)は、太陽電池の非線形電気的挙動を特徴付けるパラメータである。 充填係数は、太陽電池からの最大電力と開放回路電圧Vocとの短絡電流Iscとの比として定義される。表形式のデータでは、P = FF * Voc * Iscの条件下でセルが最適な負荷を提供できる最大電力を見積もるためによく使用されます。 ほとんどの目的のために、FF、Voc、およびIscは、典型的な条件下で光電池の電気的挙動の有用な近似モデルを与えるのに十分な情報である。
任意の与えられた一連の動作条件に対して、セルは、セルの電流(I)および電圧(V)の値が最大電力出力をもたらす単一の動作点を有する。 これらの値は特定の負荷抵抗に対応し、オームの法則で規定されているようにV / Iに等しくなります。 パワーPは、P = V * Iによって与えられる。 その有用な曲線の大部分の光電池は、定電流源として作用する。 しかし、光起電力セルのMPP領域では、その曲線は電流と電圧との間にほぼ逆指数関係があります。 基本回路理論から、I / V比(dP / dV = 0の場合)と等価で、逆にIV曲線の導関数(グラフ、勾配)dI / dVが等しい場合、デバイスからまたはデバイスに供給される電力が最適化されます。 これは最大パワーポイント(MPP)として知られており、カーブの「膝」に対応しています。
この値の逆数に等しい抵抗R = V / Iを有する負荷は、装置から最大電力を引き出す。 これは、細胞の「固有抵抗」と呼ばれることがあります。 これは、照明のレベル、ならびに細胞の温度および年齢などの他の要因に応じて変化する動的量である。 抵抗値がこの値よりも低いかまたは高い場合、消費される電力は利用可能な最大値より小さくなり、セルは効率的に使用されません。 最大電力点追跡器は、このタイプの点を探索するために異なるタイプの制御回路または論理を利用し、したがって変換器回路がセルから利用可能な最大電力を抽出できるようにする。
実装
負荷がソーラーパネルに直接接続されると、パネルの動作点はほとんどピーク電力にならない。 パネルによって見られるインピーダンスは、ソーラーパネルの動作点を導出する。 したがって、パネルによって見られるインピーダンスを変化させることによって、動作点をピーク電力点に向かって移動させることができる。 パネルはDCデバイスなので、一方の回路(ソース)のインピーダンスを他方の回路(負荷)に変換するにはDC-DCコンバータを使用する必要があります。 DC-DCコンバータのデューティ比を変更すると、パネルのようにインピーダンスが変化します。 特定のインピーダンス(またはデューティ比)では、動作点はピーク電力転送点になります。 パネルのI-V曲線は、放射輝度および温度などの大気条件の変化に伴って大きく変動し得る。 従って、動的に変化する動作条件でデューティ比を固定することは不可能である。
MPPTの実装では、パネルの電圧と電流を頻繁にサンプリングするアルゴリズムを使用し、必要に応じてデューティ比を調整します。 マイクロコントローラは、アルゴリズムを実装するために使用されます。 最新の実装では、分析や負荷予測に大きなコンピュータを使用することがよくあります。
分類
コントローラは、アレイの出力を最適化するためのいくつかの戦略に従うことができます。 最大電力点トラッカーは、異なるアルゴリズムを実装し、アレイの動作条件に基づいてそれらを切り替えることができる。
戸惑い、観察する
この方法では、コントローラは、アレイから少量だけ電圧を調整し、電力を測定する。 電力が増加すると、電力がもはや増加しなくなるまで、その方向のさらなる調節が試みられる。 これは摂動法(perturb and observe method)と呼ばれ、最も一般的ですが、この方法では出力が振動する可能性があります。 山登り法と呼ばれているのは、最大電力点以下の電圧に対する電力のカーブの上昇と、その点を上回る降下に依存するためです。 Perturb and observeは、実装が容易であるため、最も一般的に使用されているMPPTメソッドです。 適切な予知的かつ適応的な登山戦略が採用されていれば、田舎と観測方法はトップレベルの効率をもたらすかもしれない。
インクリメンタルコンダクタンス
インクリメンタルコンダクタンス方式では、コントローラはPVアレイの電流と電圧の増分変化を測定し、電圧変化の影響を予測します。 この方法は、コントローラにおいてより多くの計算を必要とするが、摂動法および観測法(P&O)よりも迅速に変化する条件を追跡することができる。 P& Oアルゴリズムと同様に、出力において振動を発生させることができる。 この方法は、電圧(dP / dV)に対する電力の変化の符号を計算するために太陽電池アレイの増分コンダクタンス(dI / dV)を利用する。
増分コンダクタンス法は、増分コンダクタンス(IΔ/VΔ)とアレイコンダクタンス(I / V)との比較によって最大電力点を計算する。 これらの2つが同じ場合(I / V =IΔ/VΔ)、出力電圧はMPP電圧になります。 コントローラは、照射が変化してプロセスが繰り返されるまでこの電圧を維持します。
増分コンダクタンス法は、最大電力点dP / dV = 0、およびP = IVにおける観測に基づいています。アレイからの電流は、電圧の関数として表すことができる:P = I(V)V。 したがって、dP / dV = VdI / dV + I(V)となる。 これをゼロに等しく設定すると、dI / dV = -I(V)/ Vとなる。 したがって、最大電力点は、増分コンダクタンスが瞬時コンダクタンスの負に等しいときに達成される。
テクニカル手続き
「影の管理」
以下で説明するすべての方法は、現在のパフォーマンスの最大値付近で比較的小さな増分でMPPを探しています。 これは、太陽光発電機がMPPのほとんどの時間(MPP適合率が高い)のすぐ近くで動作するという利点を有する。 欠点は、部分的に影を付けられた太陽光発電機のトラッカーが、グローバルMPPへの道を見つけることなく、ローカルMPP(上記参照)にしばしば留まることです。
そのため、多くのインバータメーカーは、定期的な間隔(通常は5〜10分ごと)で世界のMPPを検索するソーラー発電機の全特性を非常に迅速に実行する追加機能を統合しました。 この機能は、「シャドウ管理」または「シャドウ管理」と呼ばれることもあり、「スイープ機能」と呼ばれることもあります。連続MPPトラッキングに代わるものではありません。
大部分の製造業者にとって、機能は工場出荷時に活性化され、他の機能についてはメニューで活性化される。 特性曲線を規則的に横切ることによる歩留まり損失(例えば、発電機がMPPで自然に作動しない間)は、例えば「0.2%」として与えられ、例えば特性曲線を横切る持続時間は2秒。
インバータの入力電圧範囲は制限要因であることに注意してください。これらのモジュールだけで、シェーディングされていないモジュールの数がインバータの最小入力電圧に達するのに十分であれば、グローバルMPPを制御できます。 したがって、シェーディングのために十分に長い文字列を形成することが重要です。 (以前は、シャドー管理の導入以来、多くの短い文字列を形成するためにシャドウを使用することは時代遅れになっています。)
電圧上昇の方法
最大パワーを見つける最も簡単な方法では、MPPトラッカーは太陽電池の負荷をゼロから連続的に増加させ、パワー出力を増加させます。 最大電力に達すると、電力が再び減少し始め、これは検索の終了基準となります。 これはMPPトラッカー内のマイクロプロセッサーを常に実行する反復プロセスであり、照射条件が変化しても最大パワーポイントで常に操作が行われるようになっています。 部分的に影を付けられた太陽光発電機の場合、コントローラは(それが偶然であれば)極大値にとどまる。
ロード・ジャンプの方法
負荷ジャンプの方法(English Perturb and observe)では、コントローラは、太陽電池の負荷を一定の方向に小さなステップ(負荷ステップ)で周期的に変化させ、太陽電池によって供給される電力を測定する。 現在測定された電力が前の期間の測定電力よりも高い場合、コントローラはこの探索方向を維持して次の電力ジャンプを行います。 測定された電力が最後の測定期間の電力よりも小さい場合、コントローラは探索方向を変更し、反対方向の負荷ジャンプを実行します。 このようにして、最大電力が絶えず探索され、その結果、最大電力の正確な点は見出されないが、それが十分小さい場合には問題ではない1負荷ジャンプに近づく。 パフォーマンスの最大値を取り巻く一種の振動を作り出します。 ソーラー発電機が部分的に陰になっている場合、コントローラは(偶然に)それがあれば、極大値にとどまります。
上昇するコンダクタンス
増分コンダクタンスの方法の考え方は、太陽電池の微分と比コンダクタンスに基づいて最大電力を求めることに基づいています。 最大電力点は、電圧変化に対する電力出力の変化がゼロになるという事実によって特徴付けられる。 電力曲線のどちらの側が現在の負荷点であるかに応じて、負荷の変化に応じて電力 – 電圧比が増加または減少し、次の式が得られます。
最大値の左側に:
最大値のすぐ隣に:


方程式を変形することにより、制御装置について以下の条件が得られる。ここで、IおよびUは制御周期の現在の測定値であり、dI、dUは前の制御周期への変化である。
最大値の左側に:
最大値のすぐ隣に:


パフォーマンスの最大値:

この状態を使用して、コントローラは、所望の最大電力の状態に近づく方向に制御サイクルごとの負荷を段階的に変更する。 システムがこの条件を満たす場合、パフォーマンスの最大値が検出され、検索を終了することができます。 太陽電池の照度によって出力電力が変化すると、コントローラは検索を再開する。
部分的に影を付けられた太陽光発電機の場合、コントローラは(それが偶然であれば)極大値にとどまる。
一定張力の方法
定電圧の方法は、太陽電池の開放回路電圧と太陽電池が最大電力を与える電圧との間の関係に基づいている。 したがって、可能な最大電力負荷電圧、したがって負荷の除去に必要な開回路電圧の知識に基づいて結論することができる。 異なるパラメータに基づいて無負荷電圧が変化するため、コントローラは動作中に定期的に測定する必要があります。 この目的のために、負荷は、電圧測定の間、太陽電池から分離される。 現在測定された無負荷電圧に基づいて、コントローラは最適な負荷を計算し、負荷と太陽電池を再接続するときに設定します。 開回路電圧と最適負荷電圧との間の関係は経験的に予め決定され、多くのパラメータに依存するので、正確な最大電力は達成されない。したがって、アルゴリズムは厳密な意味で、実際の最大電力を探している人は誰もいません。太陽発電機では動作しません。
技術的な実装
ソフトウェア
この方法の技術的実装では、マイクロコントローラまたはデジタル信号プロセッサは、通常、可能な方法のうちの1つを実行する。 この場合、必要な計算を実行し、結果をパルス幅変調によってDC-DCコンバータに渡すことができる、アナログ/デジタル変換器によって提供される必要な測定データであるプロセッサ。
ハードウェア
太陽電池の負荷は負荷電圧に基づいて調整されるが、レギュレータの出力電圧はほぼ一定でなければならないため、電圧差を調整するためにDC-DCコンバータが必要となり、太陽電池の負荷が増加する。 太陽光発電システムの場合、太陽電池の最適負荷電圧の電圧範囲は、充電される蓄電池の電圧の周りを移動することが可能である。 従って、DC-DCコンバータの入力電圧は、その出力電圧より大きくても小さくてもよい。 この要件を満たすには、逆変換器、スプリットパイコンバータ、高次コンバータ(UCコンバータ、SEPICコンバータ、ダブルインバータ)などのこの機能を満たすコンバータトポロジが必要です。
現在の掃引
現在の掃引方法は、PVアレイ電流の掃引波形を使用して、PVアレイのI-V特性が取得され、一定の時間間隔で更新されるようにします。 最大電力点電圧は、同じ間隔で特性曲線から計算することができます。
定電圧
MPPトラッキングにおける「定電圧」という用語は、さまざまな著者によって異なる技術を説明するために使用されています。出力電圧はすべての条件下で一定の値に調整され、出力電圧は一定の比率に基づいて調整されます測定された開回路電圧(VOC)。 後者の技術は、いくつかの著者による「開放電圧」法と対照的に呼ばれている。 出力電圧が一定に保たれている場合、最大電力点を追跡しようとする試みはないので、MPP追跡が失敗する傾向がある場合にはいくつかの利点を有するが、厳密には最大電力点追跡技術ではなく、そのような場合にMPPT法を補うために使用されることがあります。
「定電圧」MPPT法(「開放電圧法」としても知られている)では、負荷に供給される電力が一時的に遮断され、ゼロ電流による開回路電圧が測定される。 次に、制御装置は、開回路電圧VOCの固定比、例えば0.76で制御された電圧で動作を再開する。 これは、通常、期待される動作条件に対して、経験的にまたはモデル化に基づいて最大電力点であると決定された値である。 このように、PVアレイの動作点は、アレイ電圧を調整し、それを固定基準電圧Vref = kVOCと一致させることによって、MPPの近くに維持される。 Vrefの値は、MPPと同様に他の要因に対して最適な性能を与えるように選択することもできるが、この技術の中心的な考えは、VrefがVOCに対する比として決定されることである。
「定電圧」比法の固有の近似値の1つは、MPP電圧とVOCの比がほぼ一定であるため、さらに最適化を行う余地があります。
方法の比較
摂動と観測の両方、および増分コンダクタンスは、PVアレイの動作状態に対する電力カーブの極大を見つけることができる「山登り」方法の例であり、実際の最大電力点を提供します。
摂動法および観測法は、定常放射照度下であっても最大出力点の周りに振動出力を必要とする。
インクリメンタルコンダクタンス法は、この値の周りで振動することなく最大電力点を決定することができる摂動および観測(P&O)方法よりも利点がある。 それは、摂動法および観測法よりも高い精度で、急速に変化する照射条件下で最大のパワーポイントトラッキングを行うことができる。 しかし、インクリメンタルコンダクタンス法は、(意図せずに)振動を発生させることがあり、急速に変化する大気条件下で不規則に実行することができる。 P&amp; O法と比較してアルゴリズムの複雑さが高いため、サンプリング周波数は低下する。
定電圧比(または「開放電圧」)法では、開回路電圧を測定するために太陽電池アレイからの電流を瞬間的にゼロに設定し、その後測定された電圧の所定のパーセンテージ、通常約76%に設定しなければならない。 電流がゼロに設定されている間にエネルギーが無駄になる可能性があります。MPP / VOC比として76%の近似値は必ずしも正確ではない。 実装が単純で低コストであるにもかかわらず、割込みはアレイ効率を低下させ、実際の最大電力点を確実に見つけることはできません。しかし、一部のシステムの効率は95%を超える可能性があります。
MPPT配置
伝統的なソーラーインバータは、PVアレイ全体(モジュール連想)全体としてMPPTを実行します。 このようなシステムでは、インバータによって指示された同じ電流が、ストリング(シリーズ)内のすべてのモジュールを流れる。 異なるモジュールは異なるIV曲線と異なるMPP(製造公差、部分シェーディングなどのため)を有するため、このアーキテクチャは、一部のモジュールがMPP以下で実行され、結果として効率が低下することを意味する。
一部の企業(パワー・オプティマイザを参照)は、最大のパワー・ポイント・トラッカーを個々のモジュールに配置しており、不均一なシェーディング、汚れ、または電気的不一致にもかかわらず、それぞれを効率的に動作させることができます。
データは、2つのインバータまたは複数のMPPTを備えた1つのインバータを有する場合と比較して、東および西向きモジュールがあるプロジェクトに1つのMPPTを有する1つのインバータを有することは不都合がないことを示唆している。
電池での操作
夜間には、オフグリッドのPVシステムでバッテリを使用して負荷を供給することがあります。 完全に充電されたバッテリパックの電圧は、PVパネルの最大電力点電圧に近い場合がありますが、バッテリが部分的に放電された日の出の場合はそうではありません。 充電は、PVパネルの最大電力点電圧よりかなり低い電圧で開始され、MPPTはこの不一致を解決することができる。
オフグリッドシステムのバッテリが完全に充電され、PV生産がローカル負荷を超えると、MPPTは余剰電力にそれを吸収する負荷がないので、もはや最大電力点でパネルを動作させることができません。 MPPTは、生産が需要と正確に一致するまでPVパネルの動作点をピーク電力点からずらす必要があります。 (宇宙船で一般的に使用されている別の方法は、余剰PV電力を抵抗負荷に迂回させて、ピーク電力点で連続的に動作させることです)。
グリッド接続された太陽光発電システムでは、ソーラーモジュールから供給されるすべての電力がグリッドに送られます。 したがって、グリッド接続されたPVシステムのMPPTは、常に最大電力点でPVモジュールを動作させようとします。