電気モーターは、電気エネルギーを機械エネルギーに変換する電気機械である。 ほとんどの電気モータは、モータの磁場と巻線電流との間の相互作用を介して動作し、回転の形態で力を生成する。 電気モータは、バッテリ、自動車または整流器などの直流(DC)源によって、または電力網、インバータまたは発電機などの交流(AC)源によって電力供給され得る。 発電機は機械的に電動機と同一であるが、逆方向に動作し、機械的エネルギー(流水など)を受け取り、この機械的エネルギーを電気エネルギーに変換する。
電動機は、動力源の種類、内部構造、適用および運動出力のタイプなどの考慮によって分類することができる。 AC対DCタイプに加えて、モータはブラシレスまたはブラシレスでもよく、様々な相(単相、二相、または三相参照)であってもよく、空冷または液体冷却のいずれでもよい。 標準寸法と特性を備えた汎用モータは、工業用に便利な機械的パワーを提供します。 最大の電気モーターは、船の推進、パイプラインの圧縮、およびポンピングされた貯蔵の用途に使用され、定格は100メガワットに達します。 電気モーターは、産業用ファン、送風機およびポンプ、工作機械、家庭用電化製品、電動工具およびディスクドライブに見られる。 小さなモーターは電気時計に見られることがあります。
牽引モータによる回生制動などの特定の用途では、電気モータを発電機として逆に使用して、熱および摩擦として失われる可能性のあるエネルギーを回収することができる。
電気モーターは線形または回転力(トルク)を生成し、電気を運動に変換するが、使用可能な機械的力を発生させない磁気ソレノイドおよびスピーカーなどの、アクチュエータおよびトランスデューサとそれぞれ区別するデバイスと区別することができる。
コンポーネント
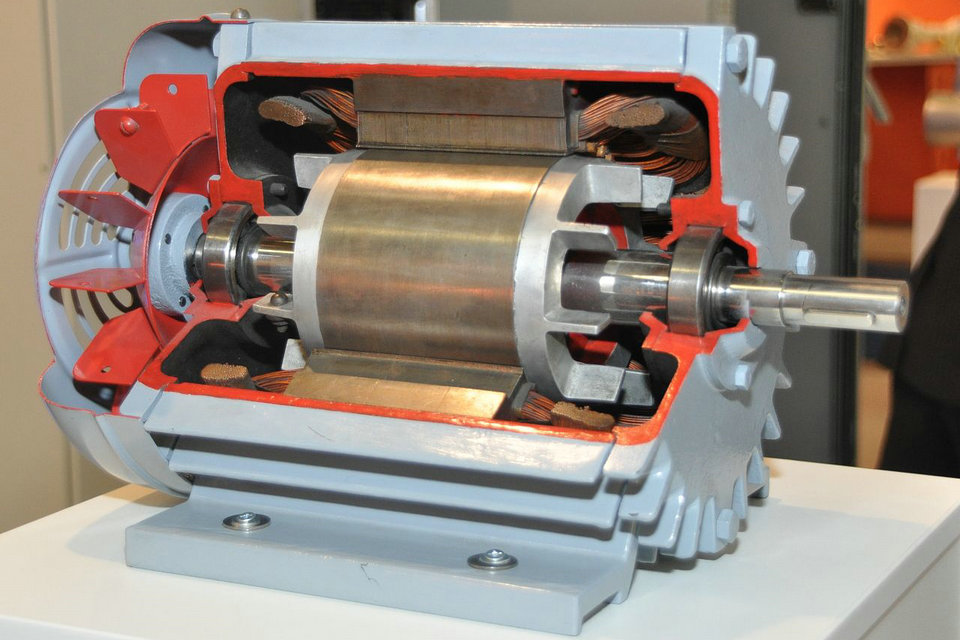
ローター
電気モーターでは、可動部分は回転子であり、シャフトを回転させて機械的動力を供給する。 回転子は、通常、ステータの磁場と相互作用してシャフトを回転させる力を生成する電流を運ぶ導体を敷設している。 代替的に、いくつかのロータは永久磁石を担持し、ステータは導体を保持する。
ベアリング
ローターはベアリングによって支持されており、ローターはその軸を中心に回転することができます。 軸受は、モータハウジングによって支持される。 モータシャフトは、ベアリングを通ってモータの外側に延び、負荷が加えられる。 荷重の力が最も外側の軸受を超えて作用するので、荷重はオーバーハングしたと言われます。
ステーター
固定子は、モータの電磁回路の固定部分であり、通常、巻線または永久磁石からなる。 ステータコアは、薄板と呼ばれる多くの薄い金属シートでできています。 ラミネーションは、ソリッドコアを使用した場合に生じるエネルギー損失を低減するために使用されます。
エアギャップ
ロータとステータの間の距離をエアギャップといいます。 エアギャップは重要な影響を有し、大きなギャップが性能に強い悪影響を及ぼすため、一般にできるだけ小さい。 これは、モータが動作する低力率の主な原因です。 磁化電流はエアギャップと共に増加する。 このため、エアギャップは最小限に抑える必要があります。 微小な隙間は、騒音や損失に加えて機械的な問題を引き起こす可能性があります。
巻線
巻線とは、電流を通電すると磁極を形成するように積層された軟鉄磁心の周りに巻かれたコイルに巻かれたワイヤーである。
電気機械は、2つの基本的な磁場磁極構成、即ち、突極磁極構成と非永久磁極構成とがある。 突極磁極機では、磁極の磁場は、磁極面の下の磁極の周りに巻かれた巻線によって生成される。 非拘束磁極または分布磁場または丸いロータの機械では、巻線は磁極面スロットに分布する。 陰極線のモーターは、その極の磁場の位相を遅らせる磁極の巻回部分を有する。
モータの中には、金属の棒やシート、通常は銅、あるいはアルミニウムのようなより厚い金属からなる導体を有するものがある。 これらは通常、電磁誘導によって駆動されます。
整流子
整流子は、ほとんどのDCマシンと特定のACマシンの入力を切り替えるためのメカニズムです。 これは、互いに絶縁されたスリップリングセグメントとシャフトから構成されています。 モータの電機子電流は、回転ブラシを介して回転整流子に供給され、必要な電流の逆転を引き起こし、回転子が極から極に回転するときに最適な方法で機械に電力を供給する。 このような電流の逆転がない場合、モータはブレーキをかけて停止する。 電子コントローラ、センサレス制御、インダクションモータ、および永久磁石モータ分野における改良された技術に照らして、外部転流誘導および永久磁石モータは、電気機械式整流モータを置き換えています。
モータの供給と制御
モータ供給
DCモータは、通常、上述のようにスリップリング整流子を介して供給される。 ACモータの転流は、スリップリング整流器または外部整流型のいずれかでもよく、固定速度または可変速度制御タイプでもよく、同期型または非同期型でもよい。 ユニバーサルモーターは、ACまたはDCのどちらでも動作できます。
モーター制御
固定速度で制御されるACモータには、ダイレクト・オン・ラインまたはソフト・スタート・スタータが付属しています。
可変速度制御されたACモータには、様々な電力インバータ、可変周波数駆動または電子整流器技術が提供されています。
電子整流子という用語は、通常、自己整流型ブラシレスDCモータおよびスイッチドリラクタンスモータのアプリケーションに関連しています。
主要なカテゴリ
電気モーターは、磁気、静電および圧電の3つの異なる物理的原理で作動する。 はるかに、最も一般的な磁気です。
磁気モーターでは、ロータとステータの両方に磁場が形成される。 これらの2つのフィールドの間の積は力を生じさせ、したがってモータシャフトにトルクを生じさせる。 これらのフィールドの一方または両方は、モータの回転とともに変化するように作られなければならない。 これは、適切な時間に極をオンまたはオフに切り替えることによって、または極の強さを変えることによって行われます。
主なタイプはDCモーターとACモーターであり、前者は後者によってますます置き換えられます。
AC電気モーターは、非同期または同期のいずれかです。
いったん始動すると、同期モータは、すべての通常のトルク条件に対して、移動磁界の同期速度との同期を必要とする。
同期機械では、磁場は、別々に励磁された巻線または永久磁石などの誘導以外の手段によって供給されなければならない。
分数馬力(FHP)モータは、約1馬力(0.746kW)以下の定格を有しているか、標準の1 HPモータよりも小さい標準フレームサイズで製造されています。 多くの家庭用および産業用モーターは分数馬力クラスです。
略語:
BLAC – ブラシレスAC
BLDC – ブラシレスDC
BLDM – ブラシレスDCモータ
EC – 電子整流子
PM – 永久磁石
IPMSM – 内部永久磁石同期モータ
PMSM – 永久磁石同期モータ
SPMSM – 表面永久磁石同期モータ
SCIM – リスケージ誘導モータ
SRM – スイッチドリラクタンスモータ
SyRM – 同期リラクタンスモータ
VFD – 可変周波数ドライブ
WRIM – 巻線型誘導電動機
WRSM – 巻上ローター同期モーター
LRA – Locked-Rotor Amps:全電圧を印加したときの始動条件で期待できる電流。 起動時に即座に発生します。
RLA – 定格負荷電流:任意の動作条件下でモータが消費する最大電流。 頻繁に誤ってランニング・ロード・アンプと呼ばれ、モーターが常にこれらのアンプをプルするべきであると誤って信じさせる。
FLA – フルロード・アンプ:1976年に「RLA定格負荷アンプ」に変更されました。
自己整流モータ
ブラシ付きDCモータ
定義上、すべての自己整流DCモータはDC電力で動作します。 ほとんどのDCモータは小型の永久磁石(PM)タイプです。 それらには、回転と同期してモータ巻線の電流を逆転させるブラシ付き内部機械転流が含まれています。
電気励磁DCモータ
整流されたDCモータは、回転シャフトに取り付けられた電機子に巻回された1組の回転巻線を有する。 シャフトはまた、シャフトが回転するとロータ巻線内の電流の流れを周期的に逆転させる長寿命の回転電気スイッチである整流子を担持する。 かくして、全てのブラシ付きDCモータは、その回転巻線を流れる交流を有する。 電流は、整流子を支持する1つ以上のブラシ対を通って流れる。 ブラシは外部電源を回転電機子に接続する。
回転電機子は、積層された磁気的に「軟らかい」強磁性コアの周囲に巻かれた1つ以上のコイルのコイルからなる。 ブラシからの電流は、電機子の1つの巻線と整流子を通って流れ、一時的な磁石(電磁石)となる。 電機子によって生成された磁場は、モータフレームの一部として、PMまたは別の巻線(界磁コイル)によって生成された固定磁場と相互作用する。 2つの磁場の間の力は、モータシャフトを回転させる傾向がある。 整流子は、回転子の磁極が固定子磁場の磁極と完全に整列するのを防ぐように、回転子の回転に伴ってコイルに電力を供給し、回転子は決して停止しない(コンパス針のように)電源が供給されている限り。
従来のコミュテータDCモータの限界の多くは、ブラシが整流子を押す必要があるためです。 これにより摩擦が生じます。 スパークは、ブラシが整流子セクション間の絶縁ギャップを横切るときに、ロータコイルを通って回路を作り、遮断することによって生成される。 整流子の設計に応じて、これは隣接する部分を短絡させるブラシを含み、従ってコイル端部は間隙を横切って瞬間的に短絡する。 さらに、ロータコイルのインダクタンスは、その回路が開かれたときに、それぞれの両端の電圧が上昇し、ブラシのスパークを増加させる。 あまりにも急速なスパークが整流子を過熱したり、浸食したり、溶かしたりするので、このスパークは機械の最高速度を制限します。 ブラシの単位面積当たりの電流密度は、それらの抵抗率と組み合わせて、モータの出力を制限する。 また、電気的接触を作り破壊することによって電気的ノイズが発生する。 スパークによりRFIが生成されます。 ブラシは最終的には摩耗し交換が必要であり、整流子自体は摩耗およびメンテナンス(大型モータの場合)または交換(小型モータの場合)される。 大型モータ上の整流子アセンブリは高価な要素であり、多くの部品を精密に組み立てる必要があります。 小型モーターでは、通常、整流子はローターに永久的に組み込まれているため、交換するには通常ローター全体を交換する必要があります。
大部分の整流子は円筒状であるが、絶縁体に取り付けられたいくつかのセグメント(通常は少なくとも3つ)からなるフラットディスクもある。
モータの出力を最大にするためには大きなブラシ接触面積が必要であるが、ブラシを過度に跳ね返らせたり発火させたりすることなくモータを動作させる速度を最大にするために、 (より小さいブラシもまた低コストで望ましい。)より剛性の高いブラシスプリングを使用して、所与のマス仕事のブラシをより高速で、より大きな摩擦損失(より低い効率)およびブラシおよび整流子摩耗の加速の代償として製造することができる。 したがって、DCモータブラシの設計は、出力電力、速度、および効率/摩耗の間のトレードオフを必然的に伴う。
DCマシンは次のように定義されます。
電機子回路 – 負荷電流が流れる巻線で、モータまたは発電機の固定部分または回転部分のいずれかになります。
界磁回路 – 電磁誘導を電気機械で行うことができるように磁場を生成する巻線のセット。
転流:整流がDC機械で達成されるか、またはDCが得られる機械的技術。
ブラシ付きDCモータには5種類あります。
DCシャント巻モータ
直流直列巻線モータ
DC複合モータ(2つの構成):
累積化合物
差別的に配合された
PM DCモータ(図示せず)
別々に励起される(図示せず)。
永久磁石DCモータ
PM(永久磁石)モータは、固定子フレームに界磁巻線を有しておらず、代わりに、磁場を提供するためにPMに依存して、回転子場が相互作用してトルクを生成する。 アーマチュアと直列の補償巻線は、大型モータで負荷の下で転流を改善するために使用できます。 このフィールドは固定されているため、速度制御のために調整することはできません。 PMフィールド(ステータ)は、小型モータでは、界磁巻線の電力消費をなくすのに便利です。 大部分の大型DCモータは、ステータ巻線を有する「ダイナモ」タイプのものである。 歴史的に、PMを分解した場合、PMは高流量を保持することができませんでした。 必要な磁束量を得るためにより多くの現場での巻線が実用的でした。 しかし、大規模なPMはコストが高く、危険で組み立てが困難です。 これは大型機械の傷口に有利です。
全体的な重量とサイズを最小限に抑えるために、小型PMモータは、ネオジムまたは他の戦略的要素で作られた高エネルギー磁石を使用することができる。 そのほとんどがネオジム – 鉄 – ホウ素合金である。 より高い磁束密度のために、高エネルギーPMを有する電気機械は、最適に設計された単一給電の同期電気および誘導電気機械と少なくとも競合する。 ミニチュアモーターは、少なくとも3つのローターポール(ローターの位置にかかわらず始動を確実にするため)を備えていることを除いて、図の構造に似ており、その外側ハウジングは、湾曲したフィールドマグネットの外部を磁気的にリンクするスチールチューブです。
電子整流子(EC)モータ
ブラシレスDCモータ
ブラシ付きDCモータの問題のいくつかは、BLDC設計では排除されています。 このモータでは、機械的な「回転スイッチ」またはコミュテータが、ロータの位置に同期した外部電子スイッチに置き換えられます。 BLDCモーターは一般に85〜90%以上の効率があります。 BLDCモーターの効率は96.5%まで報告されていますが、ブラシギア付きDCモーターは一般的に75〜80%の効率があります。
BLDCモータの特徴的な台形逆起電力(CEMF)波形は、部分的には、固定子巻線が均一に分布していること、および部分的に回転子の永久磁石が配置されていることから得られる。 台形BLDCモータのステータ巻線は、電気的に整流されたDCまたは内部DCモータとしても知られ、単相、二相、または三相の巻線に取り付けられたホール効果センサを使用してロータ位置検出および低コスト閉電子整流子のループ制御。
BLDCモータは、コンピュータディスクドライブやビデオカセットレコーダ、CD、CD-ROM(等)ドライブ内のスピンドル、ファン、レーザプリンタなどのオフィス製品内の機構のように、正確な速度制御が必要な場合に一般的に使用されます。写真複写機。 従来のモータに比べていくつかの利点があります。
シャドーポールモーターを使用しているACファンと比較すると、非常に効率的で、同等のACモーターよりもはるかに低温で動作します。 このクールな操作は、ファンのベアリングの寿命を大幅に改善します。
摩耗する整流子がなければ、BLDCモータの寿命は、ブラシおよび整流子を使用するDCモータに比べて大幅に長くなります。 コミュテーションは、電気ノイズやRFノイズの原因となりがちです。 整流子またはブラシなしでは、BLDCモータは、オーディオ機器またはコンピュータのような電気的に敏感な機器に使用され得る。
転流を提供する同じホール効果センサは、閉ループ制御(サーボ制御)アプリケーションに便利なタコメータ信号を提供することもできます。 ファンでは、タコメータ信号を使用して「ファンOK」信号を導出し、速度フィードバックを実行することができます。
モーターは、内部クロックまたは外部クロックと簡単に同期することができ、正確な速度制御が可能です。
BLDCモーターは、ブラシ付きモーターと異なり、スパークする機会がなく、化学薬品や燃料の揮発性の環境に適しています。 また、スパークはオゾンを生成し、換気の悪い建物に蓄積して乗員の健康に害を及ぼす可能性があります。
BLDCモーターは、通常、コンピュータのような小型機器で使用され、一般的にファンで使用され、不要な熱を除去します。
また、音響的に非常に静かなモーターであり、振動の影響を受ける機器で使用される場合の利点です。
最新のBLDCモーターは、1ワットから数キロワットまでの電力範囲にあります。 電気自動車では、約100kWまでの大型BLDCモーターが使用されています。 彼らはまた、高性能電動機で飛躍的に使用されています。
スイッチドリラクタンスモータ
SRMにはブラシや永久磁石がなく、ロータには電流が流れません。 その代わりに、トルクは、ロータ上の極とステータ上の極とのわずかなミスアライメントから生じる。 回転子はそれ自体が固定子の磁場と整列するが、固定子界磁巻線は連続的に付勢されて固定子磁場を回転させる。
界磁巻線によって生成される磁束は、最小の磁気抵抗の経路に従う。すなわち、磁束が固定子の付勢された極に最も近い回転子の極を通って流れることにより、回転子の極を磁化してトルクを生成する。 回転子が回転すると、異なる巻線が励磁され、回転子が回転する。
SRMは、一部のアプライアンスや車両で使用されています。
ユニバーサルAC / DCモータ
整流された電気的に励磁された直列または並列巻線モータは、ACまたはDC電力で動作するように設計することができるため、ユニバーサルモータと呼ばれる。 ユニバーサルモータは、界磁コイルと電機子コイルの両方の電流(したがって合成磁場)が同期して交互に(逆極性に)なるため、結果的に機械的な力が一定の回転方向に発生するため、ACでうまく動作することができます。
通常の電源ライン周波数で動作するユニバーサルモーターは、しばしば1000ワット未満の範囲で検出されます。 ユニバーサルモーターはまた、伝統的な鉄道牽引モーターの基礎を電気鉄道に形成しました。 この用途では、もともとDCで動作するように設計されたモータにACを使用すると、その磁気構成要素の渦電流加熱による効率損失を招くことになる。特に、DCの場合、ラミネートされていない)鉄であり、めったに使用されていない。
ユニバーサルモータの利点は、DCモータでより一般的ないくつかの特性、具体的には高い始動トルク、および高い走行速度が使用される場合の非常にコンパクトな設計を有するモータでAC電源を使用できることである。 負の側面は、整流子によって引き起こされるメンテナンスおよび短寿命の問題である。 このようなモータは、断続的にのみ使用される食品ミキサーや電動工具などの装置で使用され、しばしば始動トルクの要求が高い。 フィールドコイル上の複数のタップは、ステップ速度制御を提供する(不正確な)。 多くの速度を宣伝する家庭用ブレンダーは、フィールドコイルといくつかのタップとを直列に組み合わせ、モータと直列に挿入できるダイオード(半波整流ACで動作させる)を組み合わせています。 ユニバーサルモーターは電子スピードコントロールにも適しており、家庭用洗濯機などの機器に最適です。 モータは、アーマチュアに対して界磁巻線を切り替えることによってドラムを(前進および後退の両方で)攪拌するために使用することができます。
SCIMは、電源ラインの周波数よりも速くシャフトを回転させることができませんが、汎用モータははるかに高速で動作することができます。 これは、高速軽量が望まれるブレンダー、掃除機、ヘアドライヤーなどの機器に有用です。 また、モーターの特性がうまく機能するドリル、サンダー、円形およびジグソーなどのポータブルパワーツールでも一般的に使用されています。 多くの真空掃除機と雑草トリマーモーターは10,000 rpmを超えますが、多くの同様の小型グラインダーは30,000 rpmを超えます。
外部整流式AC機器
AC誘導および同期モータの設計は、AC電源グリッドから固定速度アプリケーションに供給されるような単相または多相の正弦波または準正弦波波形電力、またはVFDコントローラからの可変速度アプリケーションでの動作に最適化されています。 ACモータは、回転磁場を生成するためにACが供給されるコイルを有する固定ステータと、回転磁界によってトルクが与えられる出力シャフトに取り付けられたロータとの2つの部分を有する。
誘導モータ
ケージおよび巻線ロータ誘導モータ
誘導モータは、変圧器の動作と同様に、電磁誘導によってロータに動力が伝達される非同期式のACモータです。 誘導電動機は、固定子(固定部)が本質的に変圧器の一次側であり、回転子(回転部)が二次側であるため、回転変圧器に似ている。 多相誘導電動機は、産業界で広く使用されている。
誘導電動機は、リスケージ誘導電動機と創傷回転子誘導電動機(WRIM)にさらに分割することができます。 SCIMは、ローターの端部でリングによって結合された、通常はアルミニウムまたは銅の中実の棒からなる重い巻線を有する。 人が棒と輪のみを全体として考えると、動物の回転運動ケージとよく似ています。
この巻線に誘起された電流は、ロータ磁場を提供する。 回転子バーの形状は、速度 – トルク特性を決定する。 低速では、リスケージに誘導される電流はほぼライン周波数であり、ロータケージの外側部分にある傾向があります。 モータが加速すると、すべり周波数は低くなり、巻線の内部にはより多くの電流が流れます。 事実上、可変抵抗がロータ回路内に挿入されて、ケージの内側および外側部分における巻線部分の抵抗を変化させるようにバーを成形する。 しかしながら、そのようなモータの大部分は一様なバーを有する。
WRIMにおいて、回転子巻線は、多くの巻線で作られ、モータシャフト上のスリップリングに接続される。 ロータ回路には、外付け抵抗やその他の制御機器を接続することができます。 抵抗器はモータの速度を制御することができますが、外部抵抗に大きな電力が散逸します。 A変換器は、ロータ回路から給電され、そうでなければ浪費されるスリップ周波数電力をインバータまたは別個のモータジェネレータを介して電力システムに戻すことができる。
WRIMは主に、高慣性負荷または全速度範囲にわたって非常に高い始動トルクを必要とする負荷を開始するために使用されます。 二次抵抗またはスリップリングスタータに使用される抵抗器を正しく選択することにより、モータはゼロ速度から最高速度までの比較的低い供給電流で最大トルクを生成することができます。 このタイプのモータは、制御可能な速度も提供します。
モーターのトルク曲線は、ロータ回路に接続された抵抗の量によって効果的に変更されるため、モーターの速度を変更することができます。 抵抗の値を大きくすると、最大トルクの速度が下がります。 回転子に接続された抵抗がゼロ速度で最大トルクが発生する点を超えて増加すると、トルクはさらに減少する。
速度とともに増加するトルク曲線を有する負荷で使用すると、モータは、モータによって発生したトルクが負荷トルクに等しい速度で動作します。 負荷を低減するとモーターがスピードアップし、負荷を増加させると負荷とモーターのトルクが等しくなるまでモーターが減速します。 このようにして動作させると、スリップ損失は二次抵抗器内で散逸され、非常に重要となり得る。 速度調整と正味効率も非常に悪いです。
トルクモーター
トルクモーターは、失速している間、すなわち回転子が回転を妨げられて損傷を受けることなく、無期限に動作することができる電気モータの特殊な形態である。 この動作モードでは、モータは負荷に一定のトルク(したがって名称)を与えます。
トルクモータの一般的な用途は、テープドライブ内の供給リールモータおよびテイクアップリールモータである。 この用途では、低電圧から駆動されるので、これらのモータの特性により、キャプスタンがテープヘッドを過ぎてテープを供給しているか否かにかかわらず、テープに比較的一定の光張力が加えられる。 トルクモータは、より高い電圧から駆動され(したがってより高いトルクを供給することにより)、ギアまたはクラッチなどの追加機構を必要とせずに、早送りおよび巻き戻し動作を達成することもできる。 コンピュータゲームの世界では、力フィードバックステアリングホイールにトルクモータが使用されています。
別の一般的な用途は、電子ガバナと連動して内燃機関のスロットルを制御することである。 この使用法では、モーターはリバーススプリングに対抗してガバナの出力に従ってスロットルを動かす。 後者は、点火システムまたは磁気ピックアップからの電気パルスをカウントすることによってエンジン速度を監視し、速度に応じて、モータに印加される電流量を微調整する。 エンジンが所望の速度に対して減速を開始すると、電流が増加し、モータはより多くのトルクを発生し、リターンスプリングに当たってスロットルを開く。 エンジンが速すぎると、ガバナーはモーターに加わる電流を減らし、リターンスプリングを引き戻してスロットルを閉じます。
同期モーター
同期電動機は、交流と同じ速度で磁石を通過させるコイルで回転するロータによって区別され、それを駆動する磁場を生じる交流モータである。 これを言い換えるもう1つの方法は、通常の操作条件下でゼロスリップがあることです。 これとは対照的に、トルクを発生させるためにスリップしなければならないインダクションモーター。 同期電動機の1つのタイプは、回転子がDC磁場によって励磁される以外は誘導電動機のようなものである。 スリップリングとブラシを使用してロータに電流を流します。 回転子磁極は互いに接続し、同じ速度で動くので、同期モータと呼ばれます。 低負荷トルクのための別のタイプは、従来のかご形ロータに平らな土台をつけて離散的な極を作り出します。 ハモンド氏が第二次世界大戦前の時計用に製作したものや、旧ハモンド・オルガンで製作したもののように、回転子巻線と離散磁極はありません。 それは自己始動ではない。 古いハモンド臓器には、スプリング式の手動操作スイッチで接続された補助始動モーターがありますが、時計には背面の小さなノブで手動で始める必要があります。
最後に、ヒステリシス同期電動機は、典型的には、1相に対して位相シフトコンデンサを有する(本質的に)2相モータである。 誘導電動機のように始まりますが、滑り率が十分に低下するとロータ(滑らかな円柱)が一時的に磁化されます。 その分布した極は永久磁石同期電動機(PMSM)のように働く。 ローター材料は、一般的な釘と同じように磁化されたままですが、ほとんど難なく減磁することもできます。 一旦作動すると、回転子の極は所定の位置に留まります。 彼らはドリフトしません。
低電力同期タイミングモータ(伝統的な電気時計用のものなど)は、多極永久磁石の外部カップローターを備え、シェーディングコイルを使用して始動トルクを提供します。 Telechronのクロックモーターには、始動トルクのための陰極と、離散2極回転子のように機能する2スポークリングローターがあります。
二重給電機
2つの独立した多相巻線セットを有し、これらの多相巻線セットは、エネルギー変換プロセスに能動的(すなわち動作する)電力を供給し、少なくとも1つの巻線セットが可変速度動作のために電子的に制御される。 2つの独立した多相巻線セット(すなわち、二重電機子)は、トポロジーの重複なしに単一のパッケージに提供される最大値です。 二重給電電動機は、所与の励振周波数に対して同期速度の2倍の実効一定トルク速度範囲を有する機械である。 これは、1つの有効巻線セットしか持たない単一給電電気機械の定トルク速度範囲の2倍です。
二重給電されたモータは、より小さい電子コンバータを可能にするが、ロータ巻線およびスリップリングのコストは、パワーエレクトロニクス部品の節約を相殺し得る。 同期速度制限アプリケーションの近くで速度を制御することが難しい。