रोबोकैस्टिंग

Robocasting या डायरेक्ट इंक राइटिंग (डीआईडब्लू) एक मिश्रित विनिर्माण तकनीक है जिसमें एक पेस्ट का एक फिलामेंट (पारंपरिक मुद्रण के साथ समानता के अनुसार ‘स्याही’ के रूप में जाना जाता है) को एक छोटे नोजल से निकाला जाता है जबकि नोजल प्लेटफार्म में स्थानांतरित होता है । इस प्रकार वस्तु को परत द्वारा आवश्यक आकार परत ‘लेखन’ द्वारा बनाया गया है। इस तकनीक को पहली बार 1 99 6 में संयुक्त राज्य अमेरिका में विकसित किया गया था ताकि जियोमेट्रिकली जटिल सिरेमिक हरी निकायों को मिश्रित विनिर्माण द्वारा उत्पादित किया जा सके। रोबोकस्टिंग में, एक 3 डी सीएडी मॉडल परतों में अन्य योजक विनिर्माण तकनीकों के समान तरीके से विभाजित होता है। एक तरल पदार्थ (आमतौर पर एक सिरेमिक घोल) जिसे ‘स्याही’ कहा जाता है, तब एक छोटे नोजल के माध्यम से निकाला जाता है क्योंकि नोजल की स्थिति नियंत्रित होती है, सीएडी मॉडल की प्रत्येक परत के आकार को चित्रित करती है। स्याही तरल की तरह राज्य में नोजल से निकलती है लेकिन कतरनी पतली की भौतिक संपत्ति का शोषण करते हुए तुरंत अपना आकार बरकरार रखती है। यह फ़्यूज्ड डिप्लोशन मॉडलिंग से अलग है क्योंकि यह बाहर निकालना के बाद अपने आकार को बनाए रखने के लिए ठोसकरण या सुखाने पर निर्भर नहीं है।
प्रौद्योगिकी
रोबोकस्टिंग तकनीक का उपयोग फॉर्मिंग छेद के व्यास के आकार की गणना के साथ एक फ़ाइल प्रारूप एसटीएल के निर्माण के साथ शुरू होता है। रोबोकस्टिंग द्वारा उत्पादित उत्पाद का पहला भाग “स्याही” धागे के पहले परत में बाहर निकालना द्वारा प्राप्त किया जाता है। इसके बाद, कार्यक्षेत्र को स्थानांतरित कर दिया गया है या गठन छेद उगता है और अगली परत आवश्यक जगह पर लागू होती है। उत्पाद पूरा होने तक यह दोहराया जाता है। संख्यात्मक नियंत्रण के साथ तंत्र का उपयोग करते समय, एक नियम के रूप में, बनाने छेद की गतिविधियों को सीएएम द्वारा विकसित अनुप्रयोग सॉफ्टवेयर द्वारा नियंत्रित किया जाता है। स्टेपर मोटर्स और सर्वोमोटर्स का उपयोग आम तौर पर निकटतम नैनोमीटर में बनाने के छेद को स्थानांतरित करने के लिए किया जाता है।
उत्पाद को रोबोकस्टिंग तकनीक द्वारा निर्मित करने के बाद, सुखाने और अन्य विधियों का उपयोग आम तौर पर आवश्यक यांत्रिक गुणों को उत्पाद देने के लिए किया जाता है।
“स्याही”, मुद्रण की गति और पर्यावरणीय परिस्थितियों की संरचना के आधार पर, रोबोकस्टिंग आमतौर पर आपको काफी लंबाई (बनाने के छेद के व्यास से कई गुना अधिक) बनाने की अनुमति देता है और नीचे से समर्थित नहीं होता है। यह एक जटिल आकार के 3 डी-डिज़ाइन को बनाना आसान बनाता है, जो अन्य योजक प्रौद्योगिकियों का उपयोग करना असंभव है, जो फोटोनिक क्रिस्टल, हड्डी के ग्राफ्ट, फ़िल्टर इत्यादि के उत्पादन के लिए बेहद आशाजनक है। रोबोकस्टिंग किसी भी आकार के उत्पादों की छपाई की अनुमति देता है और किसी भी स्थिति में।
प्रक्रिया
रोबोकस्टिंग एक सॉफ्टवेयर प्रक्रिया के साथ शुरू होता है जो एक एसटीएल फ़ाइल (स्टीरियोथिथोग्राफी फ़ाइल प्रारूप) को नोजल व्यास की समान मोटाई की परतों में स्लाइस करता है। भाग पहली परत को भरने के लिए आवश्यक आकार में स्याही सामग्री के निरंतर फिलामेंट को बाहर निकालने के द्वारा उत्पादित किया जाता है। अगला, या तो मंच नीचे ले जाया गया है या नोजल ऊपर ले जाया गया है और अगली परत आवश्यक पैटर्न में जमा की जाती है। यह तब तक दोहराया जाता है जब तक कि 3 डी भाग पूरा नहीं हो जाता है। संख्यात्मक रूप से नियंत्रित तंत्र आमतौर पर कंप्यूटर-एडेड मैन्युफैक्चरिंग (सीएएम) सॉफ़्टवेयर पैकेज द्वारा उत्पन्न गणना किए गए टूल-पथ में नोजल को स्थानांतरित करने के लिए उपयोग किए जाते हैं। स्टेपर मोटर्स या सर्वो मोटर आमतौर पर नैनोमीटर के रूप में ठीक परिशुद्धता के साथ नोजल को स्थानांतरित करने के लिए नियोजित होते हैं।
इस बिंदु पर हिस्सा आम तौर पर बहुत ही नाजुक और नरम होता है। सुखाने, डिबंडिंग और सिटरिंग आमतौर पर वांछित यांत्रिक गुणों को भाग देने के लिए पालन करते हैं।
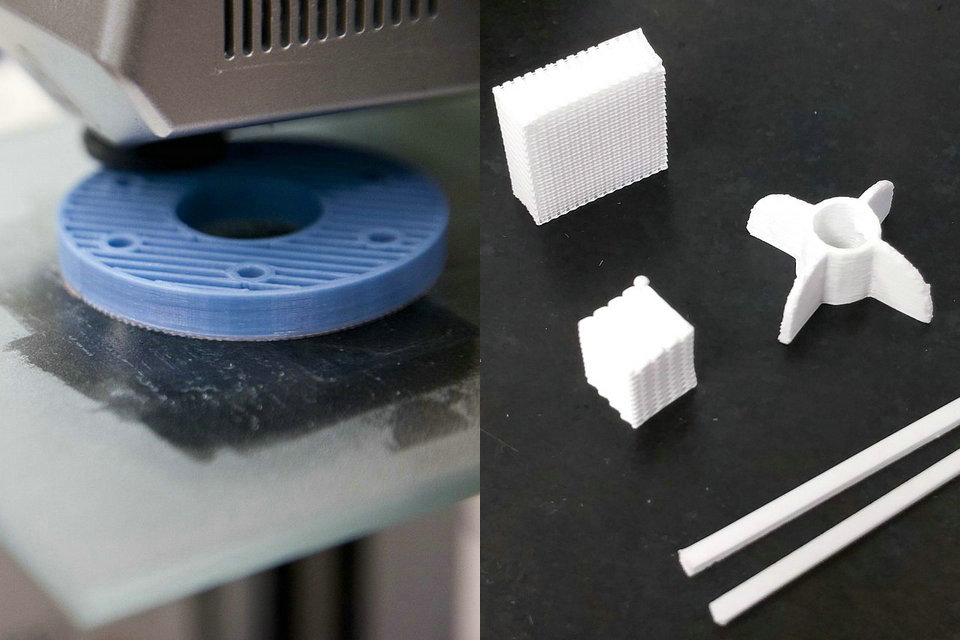
स्याही संरचना, प्रिंटिंग की गति और प्रिंटिंग पर्यावरण के आधार पर, रोबोकस्टिंग आमतौर पर मध्यम ओवरहैंग और बड़े पैमाने पर फैलाने वाले क्षेत्रों से निपटने के लिए कई बार फिलामेंट व्यास की लंबाई से निपट सकता है, जहां संरचना नीचे से असमर्थित है। यह जटिल आवधिक 3 डी मचानों को आसानी से मुद्रित करने की अनुमति देता है, एक क्षमता जो अन्य योजक विनिर्माण तकनीकों के पास नहीं है। इन हिस्सों ने फोटोनिक क्रिस्टल, हड्डी प्रत्यारोपण, उत्प्रेरक समर्थन और फ़िल्टर के क्षेत्रों में व्यापक वादा किया है। इसके अलावा, सहायक संरचनाओं को “भगोड़ा स्याही” से भी मुद्रित किया जा सकता है जिसे आसानी से हटाया जा सकता है। यह किसी भी अभिविन्यास में लगभग किसी भी आकार को मुद्रित करने की अनुमति देता है।
अनुप्रयोगों
तकनीक गैर-घने सिरेमिक निकायों का उत्पादन कर सकती है जो बहुत नाजुक हैं और उन्हें अधिकतर अनुप्रयोगों के लिए इस्तेमाल किया जाने से पहले पाप किया जाना चाहिए, जो गीले मिट्टी के सिरेमिक पॉट के समान होते हैं। तकनीक से विभिन्न ज्यामिति की एक विस्तृत विविधता बनाई जा सकती है, ठोस मोनोलिथिक भागों से माइक्रोस्कोकल “मचान” जटिल और मिश्रित सामग्रियों को जटिल बनाने के लिए। आज तक रोबोकस्टिंग के लिए सबसे अधिक शोध किए गए आवेदन जैविक रूप से संगत ऊतक प्रत्यारोपण के उत्पादन में है। “वुडपाइल” स्टैक्ड जाली संरचनाओं को आसानी से बनाया जा सकता है जो मानव शरीर में हड्डी और अन्य ऊतकों को बढ़ने की अनुमति देता है और अंततः प्रत्यारोपण को प्रतिस्थापित करता है। विभिन्न चिकित्सा स्कैनिंग तकनीकों के साथ गायब ऊतक का सटीक आकार स्थापित किया गया था और 3 डी मॉडलिंग सॉफ्टवेयर में इनपुट और मुद्रित किया गया था। कैल्शियम फॉस्फेट चश्मे और हाइड्रोक्साइपेटाइट को जैव-अनुकूलता और हड्डी के लिए संरचनात्मक समानता के कारण उम्मीदवार सामग्री के रूप में व्यापक रूप से खोजा गया है। अन्य संभावित अनुप्रयोगों में उत्प्रेरक बिस्तर या ईंधन सेल इलेक्ट्रोलाइट्स जैसे विशिष्ट उच्च सतह क्षेत्र संरचनाओं का उत्पादन शामिल है। उन्नत धातु मैट्रिक्स- और सिरेमिक मैट्रिक्स- लोड असर कंपोजिट्स का निर्माण पिघला हुआ चश्मा, मिश्र धातु या स्लरी के साथ घुमावदार लकड़ी के शरीर में घुसपैठ करके किया जा सकता है।
रोबोकस्टिंग का उपयोग सिरेमिक स्याही के साथ संभवतः अधिक बेहतर नोजल व्यास (<2μm) के माध्यम से पॉलिमर और सोल-जेल स्याही जमा करने के लिए भी किया जाता है।