एक पाइज़ोइलेक्ट्रिक मोटर या पायजो मोटर एक इलेक्ट्रिक फ़ील्ड लागू होने पर पाइज़ोइलेक्ट्रिक सामग्री के आकार में परिवर्तन के आधार पर इलेक्ट्रिक मोटर का एक प्रकार है। पाइज़ोइलेक्ट्रिक मोटर पाइज़ोइलेक्ट्रिक सेंसर के कन्वर्स पायज़ोइलेक्ट्रिक प्रभाव का उपयोग करते हैं, जिसमें पाइज़ोइलेक्ट्रिक सामग्री के विरूपण या कंपन बिजली के चार्ज का उत्पादन करती है। एक विद्युत सर्किट piezoelectric सामग्री में ध्वनिक या अल्ट्रासोनिक कंपन बनाता है, जो रैखिक या रोटरी गति उत्पन्न करता है। एक तंत्र में, एक ही विमान में लम्बाई खिंचाव और स्थिति की एक श्रृंखला बनाता है, जो कैटरपिलर के रास्ते के समान होता है।
इतिहास
1 9 47 में, बेरियम टाइटेनैट के पहले सिरेमिक नमूने प्राप्त किए गए थे और, इस समय से, पायजोइलेक्ट्रिक मोटर्स का उत्पादन सैद्धांतिक रूप से संभव हो गया। लेकिन पहला ऐसा इंजन केवल 20 साल बाद दिखाई दिया। पावर मोड में पाइज़ोइलेक्ट्रिक ट्रांसफार्मर का अध्ययन, कीव पॉलिटेक्निक संस्थान वीवी Lavrinenko के एक कर्मचारी धारक में उनमें से एक के घूर्णन की खोज की। इस घटना के कारण को समझने के बाद, 1 9 64 में उन्होंने पहली पायजोइलेक्ट्रिक रोटेशन मोटर बनाई, इसके बाद एक रिले ड्राइव करने के लिए एक रैखिक मोटर के बाद। सीधी घर्षण संपर्क वाली पहली मोटर के लिए, वह पुशर के माध्यम से रोटर के साथ पायजोइलेक्ट्रिक तत्व के यांत्रिक कनेक्शन के साथ गैर-परिवर्तनीय मोटर्स के समूह बनाता है। इस आधार पर, यह गैर-परिवर्तनीय मोटरों के दर्जनों डिज़ाइन प्रदान करता है, जिसमें गति सीमा 0 से 10,000 आरपीएम और टोक़ रेंज 0 से 100 एनएम तक होती है। दो गैर-परिवर्तनीय मोटरों का उपयोग करके, Lavrinenko मूल रूप से विपरीत की समस्या हल करता है। एक मोटर के शाफ्ट पर पूरी तरह से यह दूसरी मोटर स्थापित करता है। वह piezoelectric तत्व में मोटर संसाधन, रोमांचक torsional कंपन की समस्या हल करता है।
देश और विदेशों में इसी तरह के काम से एक दशक पहले, लैवरिनेंको ने पावरोइलेक्ट्रिक मोटरों के निर्माण के लगभग सभी बुनियादी सिद्धांत विकसित किए हैं, बिना बिजली उत्पादन जेनरेटर के तरीके में उनके काम की संभावना को छोड़कर।
विकास के वादे को देखते हुए, लैविनिनको, सह-लेखकों के साथ जिन्होंने उन्हें अपने प्रस्तावों को लागू करने में मदद की, उन्होंने कई कॉपीराइट प्रमाण पत्र और पेटेंट के साथ बचाव किया। Lavrinenko की दिशा में piezoelectric मोटरों की एक शाखा प्रयोगशाला कीव पॉलिटेक्निक संस्थान में बनाई जा रही है, और वीसीआर इलेक्ट्रॉनिक्स -552 के लिए piezomotors के दुनिया का पहला सीरियल उत्पादन आयोजित किया जा रहा है। इसके बाद, मोन्सर डीएनपीआर -2 स्लाइड प्रोजेक्टर, मूवी कैमरे, बॉल वाल्व ड्राइव इत्यादि के लिए उत्पादित किए जाते हैं। 1 9 80 में, एनर्जी ने पाइज़ोइलेक्ट्रिक मोटर्स पर पहली पुस्तक प्रकाशित की, इसमें रुचि है। प्रोफेसर के मार्गदर्शन में कौनास पॉलिटेक्निक संस्थान में पायज़ोमोटर्स का सक्रिय विकास। रगुलस्किस केएम। अतीत में स्नातक छात्र विष्णवेस्की वीएस, लैविनिनको, जर्मनी के लिए छोड़ देता है, जहां वह फिजिकल इंस्टीट्यूशन में रैखिक पायजोइलेक्ट्रिक मोटर पेश करने पर काम करना जारी रखता है। Piezoelectric मोटर के क्रमिक अध्ययन और विकास यूएसएसआर से परे चला जाता है। जापान और चीन में, वेव इंजन सक्रिय रूप से विकसित और पेश किए जा रहे हैं, अमेरिका में – सबमिनेचर रोटेशन इंजन।
निर्माण
बिजली की विशेषताओं में समान विद्युत चुम्बकीय मोटर की तुलना में एक अल्ट्रासोनिक इंजन में काफी छोटे आयाम और द्रव्यमान होते हैं। चिपकने वाले यौगिकों के साथ प्रत्यारोपित घुमावों की अनुपस्थिति यह वैक्यूम स्थितियों में उपयोग के लिए उपयुक्त बनाता है। इसकी डिज़ाइन सुविधाओं के कारण आपूर्ति वोल्टेज की अनुपस्थिति में एक अल्ट्रासोनिक इंजन का एक महत्वपूर्ण आत्म-ब्रेकिंग पल (अधिकतम टोक़ का 50% तक) होता है। यह किसी भी विशेष उपायों के उपयोग के बिना बहुत छोटे पृथक कोणीय विस्थापन (आर्क सेकंड की इकाइयों से) के लिए अनुमति देता है। यह संपत्ति piezomotor की अर्ध-निरंतर प्रकृति से जुड़ा हुआ है। दरअसल, piezoelectric तत्व जो विद्युत oscillations यांत्रिक में परिवर्तित करता है, यह एक स्थिर द्वारा संचालित नहीं है, लेकिन एक अनुनाद आवृत्ति के एक वैकल्पिक वोल्टेज द्वारा संचालित है। एक या दो दालों को लागू करते समय, आप रोटर के बहुत छोटे कोणीय विस्थापन प्राप्त कर सकते हैं। उदाहरण के लिए, पाइज़ोइलेक्ट्रिक तत्व की प्लेटों पर एक पल्स लगाने के दौरान, 2 मेगाहट्र्ज की अनुनाद आवृत्ति और 0.2-6 rev / sec की एक ऑपरेटिंग आवृत्ति के साथ अल्ट्रासोनिक इंजन के कुछ नमूने आदर्श रूप से रोटर 1 का कोणीय विस्थापन देते हैं / 9.900.000-1 / 330.000 सर्कल की परिमाण, यानी, 0.13-3.9 कोणीय सेकंड।
ऐसे इंजन के गंभीर दोषों में से एक ठोस पदार्थों (उदाहरण के लिए रेत) के इंजेक्शन के लिए इसकी काफी संवेदनशीलता है। दूसरी ओर, piezomotors एक तरल माध्यम में काम कर सकते हैं, उदाहरण के लिए, पानी या तेल में।
कार्यात्मक सिद्धांत
कुछ सामान्य रूप से इस्तेमाल सिद्धांत हैं:
यात्रा लहर मोटर
स्थायी वेव मोटर
जड़ता मोटर, जिसे स्टिक-स्लिप इंजन भी कहा जाता है
“इंचावार्म” इंजन
सीमा मोटर
यात्रा लहर और स्थायी तरंग मोटर्स और संबंधित प्रकारों को कंपन मोटर के रूप में भी जाना जाता है क्योंकि वे पाइज़ोइलेक्ट्रिक ठोस राज्य एक्ट्यूएटर द्वारा उत्पन्न कंपन द्वारा संचालित होते हैं। इसके विपरीत, जड़त्व, इंचवार्म, और स्टेपर मोटर्स को (पायजोइलेक्ट्रिक) स्टेपर मोटर्स के रूप में जाना जाता है क्योंकि उनकी गति स्पष्ट रूप से सीमांकन चरणों में विभाजित होती है। हालांकि, यह वर्गीकरण विशेष रूप से जड़ के मोटर्स के साथ हमेशा सही नहीं होता है, क्योंकि अब भी इनरियल मोटर्स हैं जिनका सिद्धांत गूंजने वाले कंपनों पर आधारित है।
“लचीला” स्टेटर (पतली बिमोरफ प्लेट, प्लेट पतली, अधिक आवृत्ति का आयाम और अनुनाद आवृत्ति कम) उच्च आवृत्ति वैकल्पिक वोल्टेज लागू होता है, जो इसे अल्ट्रासोनिक कंपन उत्पन्न करने के लिए मजबूर करता है जो एक यांत्रिक यात्रा लहर बनाता है, जो रोटर के पास स्थित (हुक) धक्का देता है। बाईं ओर जाने पर, पुशर wedging है; दाईं तरफ जाने पर, यह wedging है। पुशर्स के साथ सभी piezoelectric मोटर इस सिद्धांत पर काम करते हैं। पुशर की संख्या में वृद्धि करके, आप विशाल शुरुआती बिंदुओं के साथ मोटर्स बना सकते हैं।
सिद्धांत की सादगी को लागू करना मुश्किल है। और यदि एक साधारण इलेक्ट्रिक मोटर व्यावहारिक रूप से “घुटने पर” बनाई जा सकती है, तो अल्ट्रासोनिक इंजन 80-90% की उच्च दक्षता वाले परिष्कृत उपकरणों के बिना नहीं बनाया जा सकता है। लेकिन अगर हम दक्षता की उपेक्षा करते हैं (हमें 50-60% मिलता है), हम घर पर एक अल्ट्रासोनिक मोटर बना सकते हैं।
सिद्धांत यह है कि पाइज़ोइलेक्ट्रिक तत्व के सभी बिंदु जो रोटर के संपर्क में आते हैं उन्हें अंडाकार के करीब ट्रैजेक्टोरियों के साथ ले जाना चाहिए, घूर्णन के पायजोइलेक्ट्रिक मोटर्स के काम का आधार है। इसके लिए, दो प्रकार के परस्पर ऑर्थोगोनल ऑसीलेशन एक साथ piezoelement में उत्साहित हैं। यह पारस्परिक रूप से अनुप्रस्थ अनुदैर्ध्य, झुकाव, कतरनी और टोरसोनियल कंपन का कोई संयोजन हो सकता है। एकमात्र महत्वपूर्ण बात यह है कि इन oscillations यांत्रिक रूप से जुड़ा नहीं होना चाहिए, यानी, एक oscillation से ऊर्जा किसी अन्य परिसंचरण में स्थानांतरित नहीं किया जाना चाहिए (एक वर्ग प्लेट में, अनुदैर्ध्य oscillations की उत्तेजना इसके पक्ष के साथ अनुदैर्ध्य oscillations की उत्तेजना का कारण बन जाएगा दूसरी तरफ, जो उतार चढ़ाव का एक उदाहरण है)। यदि कंपन यांत्रिक रूप से uncoupled हैं, तो उनके बीच किसी भी चरण शिफ्ट प्राप्त किया जा सकता है। और piezoelectric मोटर के लिए इष्टतम 90 डिग्री की एक चरण शिफ्ट है। सबसे सरल मोटर (चित्र 3) में, अनुदैर्ध्य तरंगदैर्ध्य पाइज़ोइलेक्ट्रिक तत्व में विद्युत् रूप से उत्साहित होता है, और ट्रांसवर्स तरंगों, झुकने, उत्साहित होते हैं जब पाइज़ोइलेक्ट्रिक तत्व का अंत रोटर सतह के साथ चलता है। Piezoelectric तत्व के आयामों को चुना जाता है ताकि यांत्रिक अनुनाद और अनुदैर्ध्य और अनुप्रस्थ oscillations है। फिर दक्षता 80% से अधिक हो सकती है। ऐसे मोटरों के लिए, रोटर और स्टेटर के बीच घर्षण संपर्क लाइन के साथ होता है, जो उनके जीवन को कम करता है। केवल इलेक्ट्रोड द्वारा रोमांचक (1), अंजीर। 4 piezoelectric तत्व (2) टोरसोनियल कंपन, और अन्य इलेक्ट्रोड (3) में – अनुदैर्ध्य कंपन, आप एक फ्लैट घर्षण संपर्क के साथ एक मोटर बना सकते हैं। संसाधन समस्या Lavrinenko इस तरह से हल करता है।
यात्रा लहर मोटर्स
यात्रा लहर मोटर्स अधिकांश भाग रोटरी मोटर के लिए हैं। उनमें एक निश्चित भाग, स्टेटर, और एक चलती हिस्सा, रोटर शामिल है। स्टेटर में कम से कम दो पायजोइलेक्ट्रिक ट्रांसड्यूसर होते हैं जो लागू एसी वोल्टेज को यांत्रिक कंपन में परिवर्तित करते हैं। ट्रांसड्यूसर चरण से बाहर उत्साहित हैं, स्टेटर पर एक यात्रा लहर बनाते हैं। गति में बाद में स्टेटर और रोटर के बीच घर्षण संपर्क पर यह चलता है। उच्च कंपन आयामों और इस प्रकार गति को प्राप्त करने के लिए, स्टेटर आमतौर पर अल्ट्रासाउंड ओपेरेटेड क्षेत्र में आवृत्तियों पर गूंजता है। रैखिक यात्रा लहर मोटर्स में एक यात्रा लहर उत्पादन के लिए और अधिक महंगा है, यही कारण है कि रैखिक यात्रा लहर मोटर अभी तक वाणिज्यिक रूप से उपलब्ध नहीं हैं। ट्रैवल वेव मोटर्स ने विशेष रूप से कैमरा लेंस में उनके उपयोग के माध्यम से अधिक महत्व प्राप्त किया है। इसका उदाहरण “यात्रा लहर मोटर” लेख में पाया जा सकता है।
स्थायी वेव मोटर्स
स्थायी मोटर्स मोटर्स में, एक स्थायी लहर के रूप में एक आवेश पाइज़ोइलेक्ट्रिक ठोस राज्य actuators द्वारा एक स्टेटर में उत्पन्न होता है। परिणामस्वरूप, अधिकतर अंडाकार, एक या अधिक संपर्क बिंदुओं का आंदोलन रोटर चलाता है। संपर्क को उच्च कंपन आयामों में अस्थायी रूप से बाधित किया जा सकता है, जिसके परिणामस्वरूप झटके होते हैं। स्थायी तरंग मोटर्स के कई अलग-अलग आकार हो सकते हैं और दोनों घूर्णनशील और रैखिक आंदोलनों को उत्पन्न कर सकते हैं। बाईं ओर की तस्वीर चार piezo actuators द्वारा संचालित एक रोटरी स्थायी लहर मोटर दिखाता है।
जड़त्व मोटर्स
जड़त्व मोटर्स वस्तु के जड़त्व को एक घर्षण संपर्क पर ले जाने के लिए स्थानांतरित करने के लिए स्थानांतरित करते हैं। शास्त्रीय जड़ के मोटर्स में, घर्षण संपर्क में धीमी गति का एक चरण स्थिर घर्षण के अधीन है, तेजी से गति के चरण में जड़ें इतनी महान हो जाती हैं कि भागों एक-दूसरे के ऊपर स्लाइड हो जाते हैं। स्थैतिक घर्षण और स्लाइडिंग घर्षण के बीच इस परिवर्तन ने व्यापक रूप से “स्टिक-स्लिप मोटर्स” (“स्टिक टू स्टिक” और “पर्ची” = स्लाइडिंग) के व्यापक पदनाम को जन्म दिया है (स्टिक-पर्ची प्रभाव देखें)। लेकिन ऐसे जड़ें भी हैं जो हिरासत चरणों के बिना काम करते हैं। इन इंजनों में, ड्राइव चरणों के दौरान भागों एक-दूसरे पर स्लाइड करते हैं।
पिइज़ोइलेक्ट्रिक जड़त्व मोटर्स बहुत सरल हो सकता है। सबसे सरल मामले में, उनमें केवल तीन घटक होते हैं, उदाहरण के विपरीत। मोटर वाहन ड्राइविंग ठोस-राज्य एक्ट्यूएटर को इंजन के साथ तय किया जाता है या नहीं, इसके अनुसार, अन्य चीजों के अलावा, इनरियल मोटर्स के कई रूपों को अलग किया जा सकता है। अधिकांश जड़ें मोटर कम आवृत्तियों पर कुछ kHz तक संचालित होते हैं। हालांकि, कुछ अनुनाद जड़ें मोटर अल्ट्रासोनिक रेंज में भी काम करते हैं। जड़त्व मोटर्स जेड हैं। बी डिजिटल कैमरों में माइक्रोस्कोपी और छवि स्थिरीकरण में नमूना पोजीशनिंग के लिए प्रयोग किया जाता है।
इंचावार्म मोटर्स
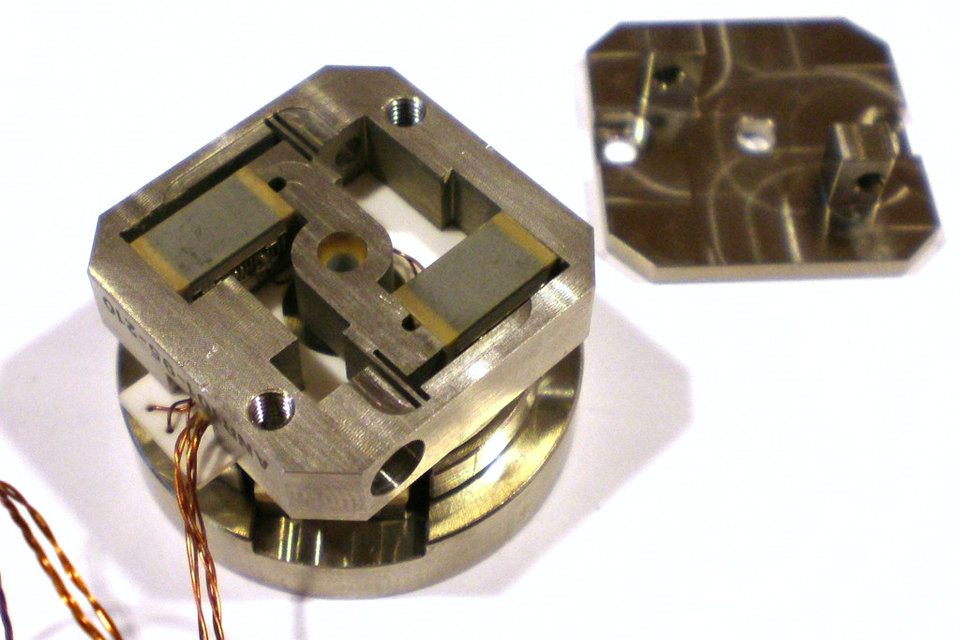
तथाकथित “इंचवार्म” मोटर्स सिद्धांत के अनुसार काम करते हैं “क्लैम्पिंग और स्लाइडिंग” विपरीत दिखाया गया है। कैटरपिलर-जैसे आंदोलन सिद्धांत (कैटरपिलर अंग्रेजी के लिए) था, जो आम तौर पर इस प्रकार के इंजन का वर्णन करता है जिसका नाम ब्रांड नाम “इन्चवार्म” है। दाईं ओर की तस्वीर में दिखायी गई मोटर में दो क्लैंपिंग एक्ट्यूएटर और एक फीड एक्ट्यूएटर (ऊपर और नीचे) शामिल है। घड़ी के संचालन के कारण, “इंचवार्म” मोटर श्रव्य सीमा में कम आवृत्तियों पर काम करते हैं। वे उच्च गति के लिए कम, महान शक्ति और परिशुद्धता के लिए डिजाइन किए गए हैं।
चलने मोटर
“इंचवार्म” मोटर्स के विपरीत, तथाकथित स्टेपर मोटर्स में, क्लैम्पिंग और ड्राइव को उसी पर लिया जाता है, न कि अलग-अलग actuators द्वारा। आसन्न तस्वीर में दिखाए गए उदाहरण में, इस उद्देश्य के लिए बिमोरफ डिज़ाइन (दो एक्ट्यूएटर प्लस इंटरमीडिएट परत) में दो झुकने वाले एक्ट्यूएटर का उपयोग किया जाता है। उनके सुझावों पर संपर्क बिंदु मुक्त आंदोलन के साथ एक अंडाकार गति प्रदर्शन करेंगे। वास्तव में, वे “रोटर”, तत्व को संचालित करने के लिए इस ट्रैक के एक हिस्से पर दबाते हैं, और वांछित दिशा में धक्का देते हैं। एक्ट्यूएटर के चरण-स्थानांतरित आंदोलन के कारण कम से कम एक क्लैंप रोटर, ताकि यह कभी भी मुक्त न हो।
वर्तमान डिजाइन
एक ड्राइव तकनीक एक स्टेटर धक्का देने के लिए piezoelectric चीनी मिट्टी के बरतन का उपयोग करता है। ये piezoelectric मोटर क्रिस्टल के तीन समूहों का उपयोग करते हैं-दो लॉकिंग, और एक उद्देश्य जो मोटर के आवरण या स्टेटर (दोनों नहीं) को स्थायी रूप से जोड़ता है। उद्देश्य समूह, दूसरे दो के बीच सैंडविच, गति प्रदान करता है। ये पायज़ोइलेक्ट्रिक मोटर्स मौलिक रूप से मोटर्स को घुमा रहे हैं, जिसमें लॉकिंग प्रकार के आधार पर दो या तीन क्रियाएं शामिल हैं। इन मोटरों को इंचवार्म मोटर्स के रूप में भी जाना जाता है। एक और तंत्र रैखिक या घूर्णन गति उत्पन्न करने के लिए सतह ध्वनिक तरंगों (एसएडब्ल्यू) का उपयोग करता है।
एक दूसरा ड्राइव प्रकार, स्क्विगल मोटर, अखरोट के लिए ऑर्थोगोनली बंधे पायज़ोइलेक्ट्रिक तत्वों का उपयोग करता है। उनके अल्ट्रासोनिक कंपन एक केंद्रीय लीड स्क्रू घुमाते हैं। यह एक सीधी ड्राइव तंत्र है।
लॉकिंग तंत्र
पहले प्रकार के पायजोइलेक्ट्रिक मोटर का गैर-संचालित व्यवहार दो विकल्पों में से एक है: सामान्य रूप से बंद या सामान्य रूप से मुक्त। जब सामान्य रूप से लॉक मोटर पर कोई शक्ति लागू नहीं होती है, तो स्पिंडल या कैरिज (क्रमशः रोटरी या रैखिक प्रकार के लिए) बाहरी बल के नीचे नहीं जाती है। एक सामान्य रूप से मुक्त मोटर की धुरी या गाड़ी बाहरी बल के नीचे स्वतंत्र रूप से स्थानांतरित होती है। हालांकि, अगर दोनों लॉकिंग समूह आराम से संचालित होते हैं, तो आमतौर पर फ्री मोटर किसी भी उद्देश्य बल प्रदान किए बिना बाहरी बल का प्रतिरोध करती है।
यांत्रिक latches और क्रिस्टल का एक संयोजन एक ही काम कर सकते हैं, लेकिन मोटर की अधिकतम कदम दर प्रतिबंधित करेगा। दूसरी प्रकार की मोटर के गैर-शक्ति व्यवहार को बंद कर दिया जाता है, क्योंकि ड्राइव स्क्रू अखरोट पर थ्रेड द्वारा बंद कर दिया जाता है। इस प्रकार यह शक्ति के साथ अपनी स्थिति रखती है।
कदम उठाना
लॉकिंग प्रकार के बावजूद, चरणबद्ध प्रकार piezoelectric मोटर-रैखिक और रोटरी-आंदोलन बनाने के लिए एक ही तंत्र का उपयोग करें:
सबसे पहले, क्रिस्टल लॉक करने का एक समूह सक्रिय रूप से एक तरफ लॉक करने और पायजो क्रिस्टल के ‘सैंडविच’ के दूसरे पक्ष को अनलॉक करने के लिए सक्रिय किया जाता है।
इसके बाद, उद्देश्य क्रिस्टल समूह ट्रिगर और आयोजित किया जाता है। इस समूह का विस्तार मोटर पथ के साथ अनलॉक लॉकिंग समूह को स्थानांतरित करता है। यह एकमात्र चरण है जहां मोटर चलता है।
फिर लॉकिंग समूह चरण एक रिलीज में ट्रिगर हुआ (आमतौर पर लॉकिंग मोटर्स में, दूसरे में यह ट्रिगर होता है)।
फिर मकसद समूह ‘पीछे’ लॉकिंग समूह को पीछे हटाना जारी करता है।
अंत में, दोनों लॉकिंग समूह अपने डिफ़ॉल्ट राज्यों में वापस आते हैं।
प्रत्यक्ष ड्राइव क्रियाएँ
सीधी ड्राइव piezoelectric मोटर निरंतर अल्ट्रासोनिक कंपन के माध्यम से आंदोलन बनाता है। इसका नियंत्रण सर्किट दो-चैनल साइनसॉइडल या स्क्वायर वेव को पाइज़ोइलेक्ट्रिक तत्वों पर लागू करता है जो थ्रेडेड ट्यूब की झुकाव अनुनाद आवृत्ति से मेल खाते हैं-आम तौर पर 40 किलोहर्ट्ज़ से 200 किलोहर्ट्ज़ की अल्ट्रासोनिक आवृत्ति। यह कक्षीय गति बनाता है जो पेंच चलाता है।
गति और परिशुद्धता
पायजोइलेक्ट्रिक क्रिस्टल का विकास और निर्माण एक अच्छी तरह से विकसित उद्योग है, जो किसी दिए गए लागू अंतर के लिए बहुत समान और लगातार विरूपण प्रदान करता है। यह, विकृतियों के मिनट के पैमाने के साथ संयुक्त, piezoelectric मोटर बहुत बढ़िया कदम बनाने की क्षमता देता है। निर्माता नैनोमीटर पैमाने पर सटीकता का दावा करते हैं। उच्च प्रतिक्रिया दर और क्रिस्टल के तेज़ विरूपण से कदम बहुत उच्च आवृत्तियों पर होते हैं-5 मेगाहर्ट्ज के ऊपर। यह प्रति सेकंड लगभग 800 मिमी की अधिकतम रैखिक गति प्रदान करता है, या लगभग 2.9 किमी / घंटा।
Piezoelectric मोटर की एक अद्वितीय क्षमता मजबूत चुंबकीय क्षेत्रों में काम करने की उनकी क्षमता है। यह उन अनुप्रयोगों के लिए उनकी उपयोगिता को बढ़ाता है जो पारंपरिक विद्युत चुम्बकीय मोटरों जैसे कि परमाणु चुंबकीय अनुनाद एंटेना का उपयोग नहीं कर सकते हैं। अधिकतम ऑपरेटिंग तापमान उपयोग किए गए पायजोइलेक्ट्रिक सिरेमिक के क्यूरी तापमान से सीमित है और + 250 सी से अधिक हो सकता है।
अन्य डिजाइन
एकल कार्रवाई
पाइज़ोइलेक्ट्रिक क्रिस्टल के साथ बहुत ही सरल सिंगल-एक्शन स्टेपिंग मोटर्स बनाया जा सकता है। उदाहरण के लिए, एक नरम सामग्री (जैसे पॉलीयूरेथेन रबड़ की तरह) की पतली परत के साथ लेपित एक कठोर और कठोर रोटर-स्पिंडल के साथ, कोण वाले पाइज़ोइलेक्ट्रिक ट्रांसड्यूसर की एक श्रृंखला की व्यवस्था की जा सकती है। (चित्र 2 देखें)। जब नियंत्रण सर्किट ट्रांसड्यूसर के एक समूह को ट्रिगर करता है, तो वे रोटर को एक कदम दबाते हैं। यह डिज़ाइन अधिक जटिल डिज़ाइन के रूप में छोटे या सटीक कदम नहीं उठा सकता है, लेकिन उच्च गति तक पहुंच सकता है और निर्माण के लिए सस्ता है।
पेटेंट
एक कंपन-संचालित मोटर का खुलासा करने वाला पहला अमेरिकी पेटेंट “वाइब्रेटरी एनर्जी डिलीवर करने के लिए विधि और उपकरण” हो सकता है (यूएस पैट संख्या 3,184,842, मारोपिस, 1 9 65)। मारोपिस पेटेंट एक “स्पंदनात्मक तंत्र” का वर्णन करता है जिसमें एक अनुनाद युग्मन तत्व में अनुदैर्ध्य कंपन को टोरॉयड प्रकार अनुनाद टर्मिनल तत्व में टोरसोनियल कंपन में परिवर्तित किया जाता है। ” पहले व्यावहारिक पायज़ोमोटर्स को 1 9 64 से शुरू होने वाले पिइज़ोइलेक्ट्रॉनिक प्रयोगशाला में वी। लैविनिनको द्वारा डिजाइन और उत्पादित किया गया था, कीव पॉलिटेक्निक इंस्टीट्यूट, यूएसएसआर। इस तकनीक के शुरुआती विकास में अन्य महत्वपूर्ण पेटेंट में शामिल हैं:
“इलेक्ट्रिकल मोटर”, वी। Lavrinenko, एम Nekrasov, पेटेंट यूएसएसआर # 21750 9, प्राथमिकता 10 मई, 1 9 65।
“पायज़ोइलेक्ट्रिक मोटर संरचनाएं” (यूएस पैट संख्या 4,01 9, 073, विष्णवेस्की, एट अल।, 1 9 77)
“पाइज़ोइलेक्ट्रिकली टोरसोनियल कंपन मोटर” (यूएस पैट नं। 4,210,837, वासिलिव, एट अल।, 1 9 80)
लाभ
इन प्रकार के इंजनों के सबसे महत्वपूर्ण फायदों में से एक यह है कि किसी भी घूर्णन गति के लिए सीधी ड्राइव संभव है। एक रचनात्मक सम्मान में, ड्राइव को काफी सरल बनाया गया है और कुछ मामलों में दक्षता में काफी वृद्धि हुई है, जो गियरबॉक्स “खाती है”। यह ऐसी संपत्ति है जिसने किसी भी प्रवाह क्षेत्र (चित्र 5) और उनके बड़े पैमाने पर उत्पादन के साथ गेंद वाल्व ड्राइव के विकास की अनुमति दी है।
गति के मामले में, piezoelectric मोटर्स के बराबर नहीं है। यह इस तथ्य के कारण है कि उनकी शक्ति रोटर के द्रव्यमान पर निर्भर नहीं है, जैसा विद्युत चुम्बकीय मोटरों के मामले में है। मिलीसेकंद के अंशों के लिए, वे आवश्यक गति प्राप्त करते हैं और महंगे पायजोइलेक्ट्रिक एक्ट्यूएटर के साथ भी प्रतिस्पर्धा कर सकते हैं, उदाहरण के लिए, ईंधन इंजेक्टरों के लिए।
Piezomotors का न्यूनतम कदम एक कोणीय दूसरे के हजारों हो सकता है। उनके आधार पर, माइक्रोस्कोप गाइड नैनोमीटर रेंज में परिचालन बनाए जाते हैं। कम गति वाले घरेलू उपकरणों के लिए, गियरबॉक्स की कमी के कारण, वे निर्बाध हैं और जला हवाओं से गंध को उत्सर्जित नहीं करते हैं, जो उनके पास नहीं है। डिस्कनेक्ट किए गए राज्य में रोटर की रोकथाम, फॉर्म की plasticity, उत्पाद में एकीकृत रूप से एकीकृत करने की क्षमता भी उपयोगी है।
पिइज़ोइलेक्ट्रिक मोटर पूरी तरह से गैर चुंबकीय सामग्री से बनाया जा सकता है। उनमें से कुछ उच्च तापमान (300 डिग्री सेल्सियस तक), वैक्यूम में, मजबूत चुंबकीय क्षेत्रों में, उच्च विकिरण की स्थितियों में, पानी या तेल में विसर्जित होने की स्थिति में काम कर सकते हैं।
आवेदन
प्रौद्योगिकी के उन क्षेत्रों में एक अल्ट्रासोनिक इंजन का सफलतापूर्वक उपयोग किया जा सकता है जहां न्यूनतम कोणीय और रैखिक विस्थापन प्राप्त करना आवश्यक है। उदाहरण के लिए, खगोल विज्ञान में, अंतरिक्ष अनुसंधान में, जहां बहुत छोटी वस्तुओं (सितारों) के लिए सटीक अभिविन्यास की आवश्यकता होती है; चार्ज कणों के त्वरक में, जहां बीम को कड़ाई से निर्दिष्ट ज्यामितीय निर्देशांक में रखना आवश्यक है; क्रिस्टलोग्राफिक संरचना (गोनोमीटर सिर के अभिविन्यास) का अध्ययन करते समय शोध में; रोबोटिक्स आदि में
Piezoelectric मोटर के आधार पर, निम्नलिखित विकसित किए गए थे: एंटेना और निगरानी कैमरे, इलेक्ट्रिक शैवर्स, काटने के उपकरण, टेप ड्राइव तंत्र, टावर स्ट्रीट घड़ियों, गेंद वाल्व के ड्राइव, विज्ञापन प्लेटफॉर्म की कम गति (2 आरपीएम) ड्राइव, बिजली के ड्रिल, बच्चों के खिलौनों और मोबाइल कृत्रिम अंगों, छत के प्रशंसकों, रोबोट आदि के ड्राइव
एकल-लेंस रिफ्लेक्स कैमरों के लिए लेंस में वेव पायज़ोइलेक्ट्रिक मोटर का भी उपयोग किया जाता है। विभिन्न निर्माताओं से इस तरह के लेंस में प्रौद्योगिकी के नाम की विविधताएं:
कैनन – यूएसएम, अल्ट्रासोनिक मोटर;
मिनॉल्टा, सोनी – एसएसएम, सुपरसोनिक मोटर;
निकोन – एसडब्ल्यूएम, साइलेंट वेव मोटर;
ओलंपस – एसडब्ल्यूडी, सुपरसोनिक वेव ड्राइव;
पैनासोनिक – एक्सएसएम, अतिरिक्त मूक मोटर;
पेंटाक्स – एसडीएम, सुपरसोनिक ड्राइव मोटर;
सिग्मा – एचएसएम, हाइपर सोनिक मोटर;
Tamron – यूएसडी, अल्ट्रासोनिक मूक ड्राइव, पीजेडडी, पायजो ड्राइव।
सैमसंग – एसएसए, सुपर सोनिक एक्ट्यूएटर;
मशीन टूल उद्योग में, इन इंजनों का उपयोग काटने के उपकरण की अति-सटीक स्थिति के लिए किया जाता है।
उदाहरण के लिए, एक माइक्रोड्राइव कटर के साथ मशीनों को मोड़ने के लिए विशेष उपकरण धारक हैं।