मोबाइल मैनिपुलेटर आजकल एक व्यापक मंच है जो मोबाइल प्लेटफॉर्म पर लगाए गए रोबोटिक मैनिपुलेटर हाथ से बने रोबोट सिस्टम को संदर्भित करता है। इस तरह के सिस्टम मोबाइल प्लेटफार्मों और रोबोट मैनिपुलेटर हथियारों के फायदे को जोड़ते हैं और उनकी कमियों को कम करते हैं। उदाहरण के लिए, मोबाइल प्लेटफार्म हाथ के कार्यक्षेत्र को बढ़ाता है, जबकि एक हाथ कई परिचालन कार्यशीलता प्रदान करता है।
विवरण
एक मोबाइल मैनिपुलेशन सिस्टम मोबाइल प्लेटफार्म और मैनिपुलेटर द्वारा दी गई निपुणता द्वारा दी गई गतिशीलता का दोहरा लाभ प्रदान करता है। मोबाइल प्लेटफार्म मैनिपुलेटर को असीमित वर्कस्पेस प्रदान करता है। मोबाइल प्लेटफ़ॉर्म की स्वतंत्रता की अतिरिक्त डिग्री भी उपयोगकर्ता को अधिक विकल्प प्रदान करती है। हालांकि, ऐसी प्रणाली का संचालन स्वतंत्रता की कई डिग्री और असंगठित पर्यावरण के कारण चुनौतीपूर्ण है।
सामान्य प्रणाली संरचना:
मोबाइल मंच
रोबोट मैनिपुलेटर
विजन
टूलींग
प्रेरणा
फिलहाल मोबाइल हेरफेर विकास और अनुसंधान वातावरण में प्रमुख फोकस का विषय है, और मोबाइल मैनिपुलेटर्स, या तो स्वायत्त या टेलीपरेटेड, कई क्षेत्रों में उपयोग किए जाते हैं, जैसे अंतरिक्ष अन्वेषण, सैन्य संचालन, गृह देखभाल और स्वास्थ्य देखभाल। हालांकि, औद्योगिक क्षेत्र के भीतर मोबाइल मैनिपुलेटर्स का कार्यान्वयन सीमित कर दिया गया है, हालांकि बुद्धिमान और लचीली स्वचालन की आवश्यकताएं मौजूद हैं। इसके अलावा, आवश्यक प्रौद्योगिकी इकाइयां (मोबाइल प्लेटफार्म, रोबोट मैनिपुलेटर्स, दृष्टि और टूलिंग) काफी हद तक उपलब्ध हैं, ऑफ-द-शेल्फ घटक उपलब्ध हैं।
इसका एक कारण यह है कि विनिर्माण उद्योग पारंपरिक रूप से कार्य करते हैं और इसलिए, नई प्रौद्योगिकियों को लागू करके जोखिम लेने में अनिच्छा होती है। इसके अलावा, औद्योगिक मोबाइल हेरफेर के क्षेत्र में ध्यान केंद्रित केंद्र व्यक्तिगत प्रौद्योगिकियों, विशेष रूप से रोबोट मैनिपुलेटर्स और टूलींग के अनुकूलन पर रहा है, जबकि एकीकरण, उपयोग और अनुप्रयोग को उपेक्षित कर दिया गया है। इसका मतलब है कि उत्पादन वातावरण में मोबाइल रोबोट के कुछ कार्यान्वयन की सूचना मिली है – उदाहरण के लिए।
अवयव
मोबाइल रोबोट मंच
मोबाइल आधार के रूप में, क्लासिक ड्राइवर रहित परिवहन प्रणाली और मोबाइल रोबोटबे दोनों का इस्तेमाल किया जाता है। मोबाइल रोबोट के उपयोग से लाभ होता है कि यह कमरे में स्वतंत्र रूप से और स्वायत्तता से नेविगेट कर सकता है और इसलिए समस्याओं के मामले में मैनिपुलेटर (पहुंच से बाहर लक्ष्य, किनेमेटिक से वर्तमान स्थिति में हेरफेर संभव नहीं है, भागों की स्थिति में बदल जाता है machined, आदि के लिए) इसे केवल एक निश्चित स्थिति में परिवहन के बजाय सीधे समर्थन कर सकते हैं। मंच की गतिशीलता बहुत महत्वपूर्ण है। एफटीएस के विपरीत, एक मोबाइल रोबोट किसी भी समय गतिशील रूप से असाइन किए गए पदों तक पहुंच सकता है। हालांकि, विशेष रूप से वर्कस्टेशन के तत्काल आसपास के क्लासिक डिफरेंटर किनेमेटिक्स, उनकी सीमा तक पहुंचते हैं और रोबोट को केवल कम या ज्यादा जटिल हस्तक्षेप से स्थानांतरित किया जा सकता है। उपयोग इसलिए, सर्वव्यापी ड्राइव तेजी से लोकप्रिय होते जा रहे हैं।
भंडारण विकल्प
यदि मोबाइल मैनिपुलेटर भी वस्तुओं को कुशलतापूर्वक परिवहन करने के लिए है, तो इसे उपयुक्त भंडारण सुविधाओं से लैस होना चाहिए। ये उपयुक्त डिजाइन के साथ भी हैंडल के परिवर्तन की अनुमति देने के लिए इस्तेमाल किया जा सकता है, बिना किसी दूसरी भुजा के। (उदाहरण के लिए, बंद होने पर बॉक्स से बाहर निकाली गई एक बियर की बोतल को पार्क किया जाना चाहिए और शरीर में इसे डालने से पहले पकड़ा जाना चाहिए)। बड़े भंडारण विकल्प रोबोट के काम को सिद्धांत में अधिक कुशल बनाते हैं, लेकिन वाहन को नेविगेट करना भी कठिन बनाते हैं।
मैनिपुलेटर हाथ
यह एक औद्योगिक रोबोट और विशेष रूप से विकसित रोबोट हाथ दोनों हो सकता है। छोटे और हल्के रोबोटिक हथियारों के चयन के साथ अब वाणिज्यिक रूप से उपलब्ध है, स्वयं विकसित हथियारों के उपयोग में उल्लेखनीय कमी आई है। (यह भी देखें: फ्लेक्सिबल मैनिपुलेटर आर्म)
ग्रिपर
वस्तु को छेड़छाड़ करने के लिए अंतिम प्रभावक का चयन किया जाना चाहिए। कई चलती उंगलियों वाले एंथ्रोपोमोर्फिक ग्रिपर्स तेजी से उपलब्ध हैं और मुख्य रूप से अनुसंधान में उपयोग किए जाते हैं।
इमेज प्रोसेसिंग
जब रोबोट कार्य वातावरण में भागों में हेरफेर करना है, तो एक छवि प्रसंस्करण प्रणाली लगभग हमेशा आवश्यक होती है। यदि केवल निश्चित हाथ आंदोलनों को किया जाना है, कम से कम वर्तमान के बीच ऑफसेट और प्रशिक्षण के दौरान उपयोग की जाने वाली प्लेटफॉर्म स्थिति को निर्धारित किया जाना चाहिए और ध्यान में रखा जाना चाहिए। मानव श्रमिकों के कार्यों को लेने के लिए, रोबोट को कम या ज्यादा विकृत भागों (जिसे बॉक्स में हैंडल भी कहा जाता है) या चर स्टोरेज स्थानों का सामना करना पड़ता है।
समन्वय नियंत्रण
मोबाइल रोबोट और रोबोटिक हथियारों के व्यक्तिगत नियंत्रण दशकों से उपयोग में हैं और अच्छी तरह से विकसित हैं।दोनों प्रणालियों को संयोजित करते समय, हालांकि, बड़ी संख्या में संभावित त्रुटि और समस्या के मामले उत्पन्न होते हैं जो अतिरिक्त समन्वय नियंत्रण को जोड़ना आवश्यक बनाता है। सबसे ऊपर, अगर आदेशित हेरफेर नहीं किया जा सकता है, तो इसे स्वतंत्र रूप से समाधान मिलना चाहिए, लेकिन किसी अन्य मुद्रा से ऐसा करना संभव होगा। पूरे सिस्टम को एक बंद किनेमेटिक श्रृंखला के रूप में नियंत्रित करने में मददगार है, जो उच्च रिडंडेंसी के कारण कार्यान्वयन में कार्यान्वित करना बेहद मुश्किल है।
सुरक्षा प्रणाली
सिद्धांत रूप में, स्थिर मैनिपुलेटर हथियार या सामान्य स्वायत्त वाहनों के लिए उपयोग किए जाने वाले सुरक्षा उपकरणों का उपयोग करना संभव है, मोबाइल मैनिपुलेटर्स के लिए भी। हालांकि, जब एक मोबाइल मैनिपुलेटर लोगों या कम से कम अन्य वाहनों के साथ कार्य क्षेत्र साझा करता है, तो सुरक्षा प्रणाली पूरी तरह से नई और बहुत मांग की आवश्यकताओं के अधीन है, क्योंकि कई संभावित खतरनाक स्थितियां उत्पन्न होती हैं।
फायदे और नुकसान
रोबोटिक हथियारों के साथ रोबोटिक मोबाइल प्लेटफॉर्म का संयोजन करते समय, परिणामी फायदे और नुकसान उनके संबंधित हिस्सों के योग से अधिक होते हैं।
लाभ:
कार्यों का दायरा और संभावित अनुप्रयोग छलांग और सीमाएं हैं।
संपूर्ण रोबोट प्रणाली सहायक प्रणालियों (लोडिंग और अनलोडिंग स्टेशनों, सामग्री हैंडलिंग उपकरण, स्थानांतरण उपकरण, …) से काफी अधिक स्वतंत्र हो जाती है और इस प्रकार कम से कम सैद्धांतिक रूप से सस्ता हो सकती है।
मोबाइल मैनिपुलेटर्स भी जटिल जटिल गतिविधियों को स्वचालित करना संभव बनाता है जो पहले मनुष्यों द्वारा ही किया जा सकता था और व्यायाम के कारण अक्सर स्वास्थ्य समस्याओं का कारण बनता था।
समग्र प्रणाली त्रुटिपूर्णता और विचलन के लिए अधिक लचीला प्रतिक्रिया दे सकती है, उदाहरण के लिए जब कोई वस्तु सीधे पहुंच योग्य नहीं होती है तो हाथ के आधार को ट्रैक करके।
हानि:
दोनों घटकों की आवश्यकताओं के कारण, ये अक्सर एक दूसरे के साथ हस्तक्षेप करते हैं:
हाथ को कुशलतापूर्वक काम करने के लिए एक बड़े स्थिर आधार की आवश्यकता होती है, लेकिन प्लेटफार्म कुशलता से नेविगेट करने के लिए छोटा और हल्का होना चाहिए।
प्लेटफार्म के चक्र के समय जितना छोटा होगा, उतनी तेज़ी से इसे ड्राइव करना होगा और कम सटीक लक्ष्य स्थितियां पहुंच जाएंगी। अधिक गलत लेकिन बांह की शुरुआती स्थिति ज्ञात है, अब इसके चक्र के समय में आवश्यक सुधारों के कारण हैं।
बैटरी संचालित प्लेटफ़ॉर्म के जीवन को बढ़ाने के लिए, कुल वजन और बिजली की खपत को कम किया जाना चाहिए।हालांकि, एक रोबोट बांह सभी अधिक कुशलता से काम करता है, और अधिक कार्यों (और इस प्रकार आमतौर पर अतिरिक्त घटक भी) जोड़ती है।
तथ्य यह है कि हाथ का कामकाजी माहौल लगातार बदल रहा है, कई पहले सहायक संरचनाओं का इस्तेमाल करते थे (हाथ परिभाषित अंत स्थिति के संबंध में भागों की आपूर्ति, घटकों के लिए अपरिवर्तनीय स्थानांतरण पदों, परिभाषित प्रकाश इत्यादि) अब या बहुत मुश्किल नहीं हैं उपयोग।
इसके अलावा, कई मोबाइल मैनिपुलेटर्स तेजी से बदलते कार्यों के लिए उपयोग करने के लिए पर्याप्त लचीला नहीं हैं। यह छोटे और मध्यम आकार के व्यवसायों में भी व्यापक उपयोग के लिए सबसे बड़ी अवरोधों में से एक है।
लोगों के साथ बातचीत करते समय, पूरी तरह से नई खतरनाक स्थितियां उत्पन्न होती हैं, जो सुरक्षा प्रौद्योगिकी पर मांगों को बढ़ाती हैं और पहले से ही तकनीकी रूप से व्यवहार्य समाधानों की तुलना में लागू करने योग्य समाधानों के अनुपात को गंभीर रूप से सीमित करती हैं।
इस प्रकार के रोबोट के लिए वर्तमान में कोई पूर्ण अनुपालन मानकों, दिशानिर्देश या डिजाइन प्रस्ताव नहीं हैं, जिससे चोट या क्षति के संभावित कानूनी परिणामों की भविष्यवाणी करना मुश्किल हो जाता है।
विकल्पों की बढ़ी हुई संख्या के साथ-साथ समग्र प्रणाली के नियंत्रण पर असमान रूप से उच्च मांगें जुड़ी हुई हैं, खासतौर पर स्वायत्त त्रुटि प्रबंधन के संबंध में। इससे मशीन डाउनटाइम का खतरा भी बढ़ जाता है।
आवेदन के क्षेत्र
मोबाइल मैनिपुलेटर्स के अनुप्रयोग के संभावित क्षेत्र विविध हैं और वर्तमान में पूरी तरह से पूर्ववत नहीं हैं। कुछ ज्ञात अनुप्रयोग हैं:
गृह वितरण सेवाएं
बीयर गेटन के व्यापक आवेदन के नेतृत्व में मुख्य रूप से सेवा रोबोटिक्स के क्षेत्र में अनुसंधान परियोजनाओं में उपयोग किया जाता है, विशेष रूप से प्रदर्शन उद्देश्यों के लिए कार्य करता है, जो निजी घरों में भी होता है और मीडिया में प्रभावी रूप से प्रभावी होता है। इन कार्यों में वैज्ञानिक चुनौती आमतौर पर अपेक्षित आर्थिक लाभों की तुलना में काफी अधिक है।
ध्यान
चूंकि पुराने और आश्रित लोगों के अनुपात में वृद्धि होती है, इसलिए नर्सों की आवश्यकता भी होगी। यह उम्मीद की जाती है कि 2050 तक देखभाल में लोगों की संख्या में रोजगार की संख्या के संबंध में तीन गुना होगा। इसलिए, विशेष रूप से जापान में विभिन्न शोध परियोजनाओं में, रोबोटों की देखभाल करने के लिए कड़ी मेहनत की गई।
उठा
भारी या अनावश्यक घटकों को चुनने में मोबाइल मैनिपुलेटर्स का उपयोग करने के लिए वर्तमान में विकास परियोजनाएं चल रही हैं। ऐसी गलतियां हैं, जो उच्च अनुवर्ती लागत का कारण बन सकती हैं, रोका जा सकता है। इसके अलावा, मानव श्रमिकों को दीर्घकालिक अस्वास्थ्यकर कार्यों से मुक्त किया जाता है, जो श्रमिकों की औसत आयु के आगे बढ़ने के लिए अधिक प्रासंगिक हो जाते हैं।
समय
| साल | रोबोट नाम | कंपनी / अनुसंधान संस्थान |
|---|---|---|
| 1996 | हिलेयर 2 बीआईएस | एलएएएस-सीएनआरएस, फ्रांस |
| 2000 | Jaume | रोबोटिक इंटेलिजेंस लैब, जैम आई यूनिवर्सिटी, स्पेन |
| 2004 | फ़ॉस्टो | वेरोना विश्वविद्यालय, इटली |
| 2006 | नियोबोटिक्स एमएम -500 | नियोबोटिक्स जीएमबीएच, जर्मनी |
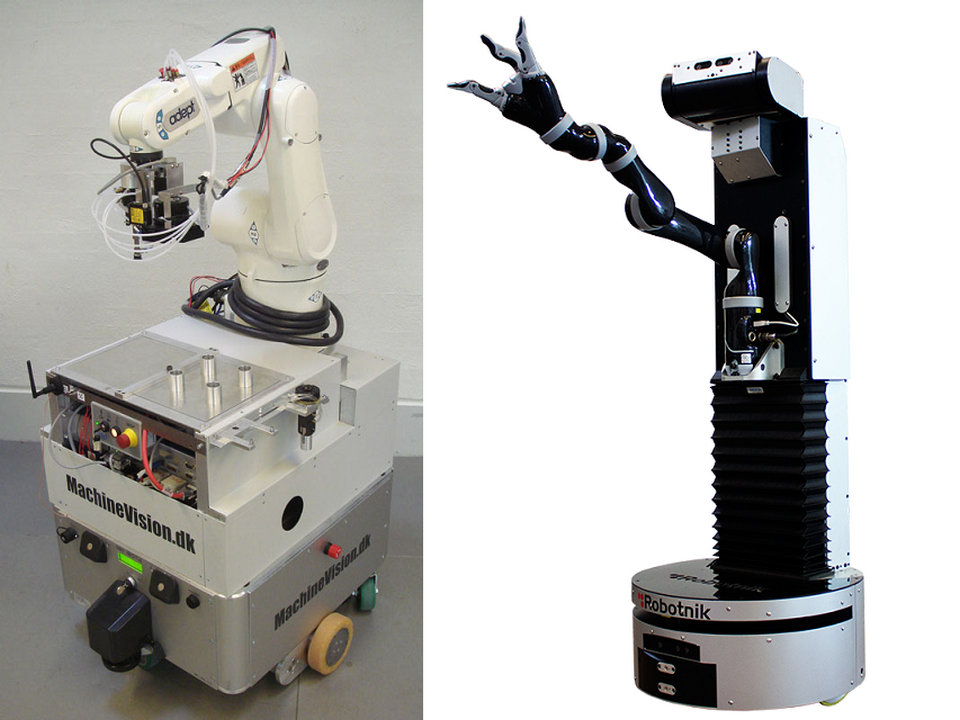
| 2009 | लिटिल हेल्पर | उत्पादन विभाग, एल्बॉर्ग विश्वविद्यालय, डेनमार्क |
| 2012 | जी WAM | रोबोटनिक ऑटोमेशन और बैरेट टेक्नोलॉजीज, स्पेन और संयुक्त राज्य अमेरिका |
| 2013 | UBR -1 | Unbounded रोबोटिक्स, संयुक्त राज्य अमेरिका |
| 2013 | एक्स-WAM | रोबोटनिक ऑटोमेशन और बैरेट टेक्नोलॉजीज, स्पेन और संयुक्त राज्य अमेरिका |
| 2015 | कार्लोस | एआईएमएनएन, स्पेन |
| 2015 | आरबी -1 | रोबोटनिक ऑटोमेशन और किनोवा रोबोटिक्स, स्पेन और कनाडा |
अत्याधुनिक
हालिया उदाहरण एल्बॉर्ग विश्वविद्यालय में उत्पादन विभाग से मोबाइल मैनिपुलेटर “लिटिल हेल्पर” है।