रोबोट का इतिहास

रोबोटों का इतिहास प्राचीन दुनिया में इसकी उत्पत्ति है। आधुनिक अवधारणा को औद्योगिक क्रांति की शुरुआत के साथ विकसित किया जाना शुरू हुआ, जिसने जटिल यांत्रिकी के उपयोग की अनुमति दी, और बाद में बिजली की शुरूआत की। इसने छोटे कॉम्पैक्ट मोटर्स के साथ मशीनों को पावर करना संभव बना दिया। 20 वीं शताब्दी की शुरुआत में, एक humanoid मशीन की धारणा विकसित की गई थी। आज, मानव-आकार के रोबोटों को निकट-मानव विचारों और आंदोलन की क्षमता के साथ कल्पना कर सकते हैं।
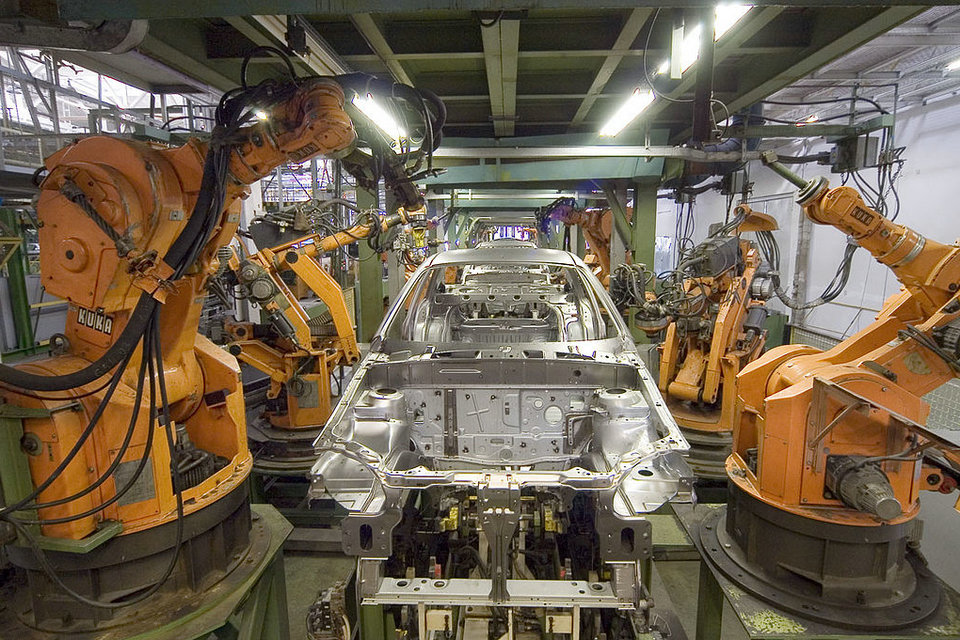
आधुनिक रोबोटों का पहला उपयोग कारखानों में औद्योगिक रोबोटों के रूप में था – सरल कार्य मशीन जो विनिर्माण कार्यों में सक्षम थीं, जिसने मानव सहायता के लिए कम आवश्यकता के साथ उत्पादन की अनुमति दी। कृत्रिम बुद्धिमानी का उपयोग करके डिजिटली नियंत्रित औद्योगिक रोबोट और रोबोट 2000 के दशक से बनाए गए हैं।
प्रारंभिक किंवदंतियों
कृत्रिम नौकरों और सहयोगियों की अवधारणाओं को कम से कम अब तक कैडमस की प्राचीन किंवदंतियों के रूप में जाना जाता है, जिन्हें कहा जाता है कि सैनिकों और पायगमालियन में परिवर्तित ड्रैगन दांत बोए गए हैं, जिनकी मूर्तियां गैलेटा के जीवन में आईं। कई प्राचीन पौराणिक कथाओं में कृत्रिम लोग शामिल थे, जैसे यूनानी देवता हेफेस्टस (रोमनों के लिए वल्कन) द्वारा निर्मित बातचीत की यांत्रिक हस्तनिर्मित, यहूदी किंवदंती के मिट्टी के गोले और नोर्स किंवदंती के मिट्टी दिग्गजों।
ग्रीक पौराणिक कथाओं में, हेफेस्टस ने उपयोगितावादी तीन-पैर वाली टेबल बनाई जो अपनी शक्ति के तहत और एक कांस्य आदमी, तालोस, जो क्रेते का बचाव करती थीं। अंततः तालिओ को मेडिया ने नष्ट कर दिया, जिसने लीड के अपने एकल नस पर बिजली की बोल्ट डाली। सुनहरे ऊन को लेने के लिए जेसन को दो अग्नि-सांस लेने वाले बैलों को कांस्य खोदने के साथ भी जरूरी था; और कैडमस की तरह उसने सैनिकों में एक अजगर के दांत बोए।
भारतीय लोकपन्नट्टी (11 वीं / 12 वीं शताब्दी) मगध के राजा अजाताशत्रु की कहानी बताती है, जिन्होंने बुद्ध के अवशेषों को इकट्ठा किया और उन्हें भूमिगत स्तूप में छुपाया। रोमा विसा के साम्राज्य से, जब तक वे राजा अशोक द्वारा निषिद्ध नहीं थे, तब तक अवशेषों को मैकेनिकल रोबोट (भूत वहाना यांता) द्वारा संरक्षित किया गया था। रोकेल की मिस्र की किंवदंती में, सेठ के छोटे भाई ने एक महल और एक कब्र बनाया जिसमें स्वायत्त मूर्तियां थीं जो मनुष्यों के जीवन को इतनी वास्तविकता से बाहर रखती थीं कि वे आत्माओं के लिए गलत थे।
यूरोपीय ईसाई किंवदंती मध्ययुगीन यूरोपीय लोगों ने प्रेरित किया जो ब्राजील के सिर तैयार किए गए थे जो उनके सामने प्रश्नों का उत्तर दे सकते थे। अल्बर्टस मैग्नस ने एक संपूर्ण एंड्रॉइड का निर्माण किया था जो कुछ घरेलू कार्यों को कर सकता था, लेकिन अल्बर्ट के छात्र थॉमस एक्विनास ने इसे अपने विचार को परेशान करने के लिए नष्ट कर दिया था। सबसे मशहूर किंवदंती रोजर बेकन द्वारा बनाई गई कांस्य सिर से संबंधित थी, जिसे ऑपरेशन के अपने पल से चूकने के बाद नष्ट कर दिया गया था या हटा दिया गया था। मध्ययुगीन साहित्य की काल्पनिक दुनिया में मनुष्यों या जानवरों जैसा ऑटोमेटा लोकप्रिय था।
ऑटोमेटा
10 वीं शताब्दी ईसा पूर्व पश्चिमी झोउ राजवंश में मैकेनिकल ऑटोमाटा का निर्माण किया गया था। कारीगर यान शि ने humanoid automata बनाया जो गा सकता है और नृत्य कर सकता है। कहा जाता है कि मशीन में हड्डियों, मांसपेशियों और जोड़ों जैसे आजीवन अंग होते हैं। कॉस्मिक इंजन, 1088 में चीन के कैफेंग में सु सॉंग द्वारा निर्मित 10 मीटर (33 फीट) घड़ी टावर में यांत्रिक मैनेक्विन शामिल थे जो घंटों तक चिंतित थे, अन्य उपकरणों के बीच गोंग या घंटी बजते थे। स्वचालन की कामें तांग राजवंश में जारी रहीं। Daifeng Ma रानी के लिए एक स्वचालित ड्रेसर नौकर बनाया। यिंग वेनलिआंग ने एक ऑटोमाटा आदमी बनाया जिसने भोजों और शेन्ग की एक लकड़ी की महिला ऑटोमाटा पर टोस्ट प्रस्तावित किए। प्राचीन चीन के सबसे अच्छे दस्तावेज वाले ऑटोमाटा में हन ज़िलिंग, एक जापानी जो 9वीं शताब्दी ईसा पूर्व की शुरुआत में चीन चले गए थे।
चौथी शताब्दी ईसा पूर्व में टेरेन्टम के गणितज्ञ आर्किटास ने एक यांत्रिक पक्षी को “द कबूतर” कहा, जिसे भाप द्वारा प्रेरित किया गया था। फिर भी एक और प्रारंभिक automaton clepsydra था, 250 ईसा पूर्व में अलेक्जेंड्रिया के Ctesibius द्वारा, एक भौतिक विज्ञानी और टॉल्मिक मिस्र से आविष्कारक। अलेक्जेंड्रिया के हीरो (10-70 ईस्वी) ने ऑटोमाटा के क्षेत्र में कई नवाचार किए, जिनमें से एक कथित रूप से बात कर सकता था। होमर के इलियड में पहले के संदर्भ को लेकर, अरिस्टोटल ने अपनी राजनीति में अनुमान लगाया (सीए 322 322 ईसा पूर्व, पुस्तक 1, भाग 4) कि ऑटोटाटा गुलामी के उन्मूलन को संभव बनाकर कुछ दिन मानव समानता ला सकता है:
केवल एक शर्त है जिसमें हम कल्पना कर सकते हैं कि प्रबंधकों को अधीनस्थों की आवश्यकता नहीं है, और स्वामी को दासों की आवश्यकता नहीं है। यह स्थिति यह होगी कि प्रत्येक उपकरण कमांड के शब्द या बुद्धिमान प्रत्याशा से, दादालस की मूर्तियों या हेफेस्टस द्वारा किए गए तिपाई जैसे अपने काम कर सकता है, जिसमें होमर से संबंधित है कि “अपनी गति से उन्होंने सम्मेलन में प्रवेश किया ओलंपस पर देवताओं “, जैसे कि एक शटल को स्वयं का बुनाई करना चाहिए, और एक प्लेक्ट्रम को अपना खुद का वीर खेलना चाहिए।
आर्टुकिद राजवंश के दौरान एक मुस्लिम आविष्कारक अल-जाजारी (1136-1206) ने रसोईघर के उपकरणों और पानी द्वारा संचालित संगीत स्वचालन सहित कई स्वचालित मशीनों का डिजाइन और निर्माण किया। एक विशेष रूप से जटिल automaton में चार स्वचालित संगीतकार शामिल थे जो झील पर तैरते थे।
12 वीं शताब्दी पुनर्जागरण के दौरान ऑटोमाटा पर हीरो के कार्यों का अनुवाद लैटिन में किया गया था। 13 वीं शताब्दी के शुरुआती कलाकार-इंजीनियर विलार्ड डी होनकोर्ट ने कई ऑटोटाटा की योजना बनाई। 13 वीं शताब्दी के अंत में, रॉबर्ट द्वितीय, आर्टोइस की गिनती ने हेस्डिन में अपने महल में एक सुखद बगीचा बनाया जिसमें कई रोबोट, humanoid और जानवर शामिल थे।
पहले सत्यापन योग्य स्वचालन में से लगभग 14 9 5 में लियोनार्डो दा विंची (1452-1519) द्वारा तैयार एक humanoid है। लियोनार्डो की नोटबुक, जिसे 1 9 50 के दशक में फिर से खोजा गया था, में कवच में एक यांत्रिक नाइट के विस्तृत चित्र होते हैं जो बैठने में सक्षम थे, अपनी बाहों को उठाते थे और अपने सिर और जबड़े ले जाएँ। 1533 में, जोहान्स मुलर वॉन कोनिग्सबर्ग ने एक automaton ईगल बनाया और लौह से बना उड़ना; दोनों उड़ सकते हैं। जॉन डी को उड़ने में सक्षम लकड़ी की बीटल बनाने के लिए भी जाना जाता है।
17 वीं शताब्दी के विचारक रेन डेस्कार्टेस का मानना था कि जानवर और मनुष्य जैविक मशीन थे। नॉर्वे की आखिरी यात्रा पर, उन्होंने उनके साथ एक यांत्रिक गुड़िया ली जो उसकी मृत बेटी फ्रांसिन की तरह दिखती थी। 18 वीं शताब्दी में मास्टर खिलौने निर्माता जैक्स डी वोकसन ने लुई एक्सवी के लिए सैकड़ों चलती भागों के साथ एक स्वचालित बतख बनाया, जो खा सकता था और पी सकता था। वोकसन ने बाद में humanoid automatons बनाया, एक ड्रमर और फेफ खिलाड़ी वास्तविक मनुष्य के लिए उनके रचनात्मक समानता के लिए नोट किया गया था। वोकसन की रचना ने यूरोपीय वॉचमेकर को मैकेनिकल ऑटोमाटा बनाने के लिए प्रेरित किया और यह मनोरंजन के लिए परिष्कृत यांत्रिक उपकरणों को इकट्ठा करने के लिए यूरोपीय अभिजात वर्ग के बीच फैशनेबल बन गया। 1770 के दशक में स्विस पियरे जैकेट-ड्रोज ने ऑटोमाटा को आगे बढ़ाया जो कि बच्चों की तरह दिखता था, जो मैरी शेली को प्रसन्न करता था, जो फ्रेंकस्टीन लिखने के लिए चला गया: द मॉडर्न प्रोमेथियस। स्वचालन में अंतिम प्रयास वुल्फगैंग वॉन केम्पेलेन द्वारा तुर्क था, एक परिष्कृत मशीन जो मानव प्रतिद्वंद्वी के खिलाफ शतरंज खेल सकती थी और यूरोप का दौरा कर सकती थी। जब मशीन को नई दुनिया में लाया गया, तो उसने एडगर एलन पो को एक निबंध कलम करने के लिए प्रेरित किया, जिसमें उन्होंने निष्कर्ष निकाला कि यांत्रिक उपकरणों के कारण तर्क या सोचना असंभव था।
जापानी शिल्पकार हिसेशिज तानाका, जिसे “जापान के एडिसन” के नाम से जाना जाता है, ने बेहद जटिल यांत्रिक खिलौनों की एक श्रृंखला बनाई, जिनमें से कुछ चाय, अग्नि तीरों को एक क्विवर से खींचा जा सकता है, या यहां तक कि एक जापानी कांजी चरित्र भी पेंट कर सकता है। ऐतिहासिक पाठ कराकुरी जुई (इलस्ट्रेटेड मशीनरी) 17 9 6 में प्रकाशित हुआ था।
आधु िनक इ ितहास
1900 के दशक
पुस्तक “द वंडरफुल विज़ार्ड ऑफ ओज़” में, रोबोट को “मैकेनिकल मेन” कहा जाता था। एक उल्लेखनीय चरित्र टिन वुडमैन था, जो टिन से बना एक आदमी था, जिसने ओज़ के जंगलों में कटा हुआ पेड़ लगाया था।
1910 के दशक
पहला humanoid रोबोट एक तुरही के साथ एक सैनिक था, जो 1 9 10 में जर्मनी के ड्रेस्डेन में फ्रेडरिक कौफमैन द्वारा बनाया गया था। प्रथम विश्व युद्ध में रिमोट कंट्रोल हथियारों का इस्तेमाल निकोला टेस्ला के काम के आधार पर किया गया था, जिन्होंने एक विद्युत नाव का निर्माण किया था जिसे रेडियो द्वारा दूरस्थ रूप से नियंत्रित किया जा सकता था।
1920 के दशक
“रोबोट” शब्द का पहली बार 1 9 20 में चेक करेल कैपेक द्वारा प्रकाशित एक नाटक में इस्तेमाल किया गया था। आरयूआर (रॉसम का यूनिवर्सल रोबोट) एक व्यंग्य था, रोबोट जैविक प्राणियों का निर्माण किया गया था जो सभी अप्रिय मैनुअल श्रम का प्रदर्शन करते थे। Čapek के अनुसार, यह शब्द चेक रोबोटा से अपने भाई जोसेफ द्वारा बनाया गया था, जिसका मतलब दासता है। नाटक आरयूआर ने “automaton” शब्द के लोकप्रिय उपयोग को बदल दिया। हालांकि, 1 9 50 के दशक तक “रोबोट” को फिल्मों, रेडियो और टेलीविज़न कार्यक्रमों में “लूट” [स्पष्टीकरण की आवश्यकता] घोषित किया गया था: उदाहरण टीवी श्रृंखला “द ट्वाइलाइट जोन” का “लोनली” एपिसोड है, जिसे पहली बार 15 नवंबर 1 9 5 9 को प्रसारित किया गया था, और विज्ञान-फाई रेडियो कार्यक्रम “एक्स मिनस वन”।
वेस्टिंगहाउस इलेक्ट्रिक कॉर्पोरेशन ने 1 9 26 में टेलीविज़न का निर्माण किया; यह एक कार्डबोर्ड कटआउट था जो विभिन्न उपकरणों से जुड़ा था जो उपयोगकर्ता चालू और बंद कर सकते थे। 1 9 27 में, फ़्रिट्ज लैंग का मेट्रोपोलिस जारी किया गया था; मास्चिनेंमेन्श (“मशीन-इंसान”), एक जीनोइड हनोनोइड रोबोट, जिसे “पैरोडी”, “फ़्यूचूरा”, “रोबोट्रिक्स” या “मारिया इंपर्सोनेटर” (जर्मन अभिनेत्री ब्रिगीट हेलम द्वारा निभाई) भी कहा जाता है, वह पहले रोबोट था फिल्म पर चित्रित किया जाना चाहिए।
1 9 27 में सबसे प्रसिद्ध जापानी रोबोटिक ऑटोमाटा जनता को प्रस्तुत किया गया था। गाकुटेनसोकू को राजनयिक भूमिका माना जाता था। संपीड़ित हवा द्वारा निष्पादित, यह तरलता से लिख सकता है और इसकी पलकें बढ़ा सकता है .. कंप्यूटर-नियंत्रित सर्वोमेचनिस की शुरुआत से पहले कई रोबोटों का निर्माण किया गया था, जो प्रमुख फर्मों के सार्वजनिक संबंध उद्देश्यों के लिए थे। ये अनिवार्य रूप से मशीनें थीं जो 18 वीं शताब्दी के ऑटोटाटा की तरह कुछ स्टंट कर सकती थीं। 1 9 28 में, लंदन में मॉडल इंजीनियर्स सोसाइटी की वार्षिक प्रदर्शनी में पहली हनोनोइड रोबोटों में से एक का प्रदर्शन किया गया था। डब्ल्यूएच रिचर्ड्स द्वारा खोजा गया, रोबोट – नामित रोबोट – ग्यारह इलेक्ट्रोमैग्नेट्स के साथ एक एल्यूमीनियम सूट का कवच और 12 मोटर वोल्ट बिजली स्रोत द्वारा संचालित एक मोटर शामिल था। रोबोट अपने हाथों और सिर को ले जा सकता है और रिमोट कंट्रोल या वॉयस कंट्रोल द्वारा नियंत्रित किया जा सकता है।
1930 के दशक
1 9 3 9 में, दुनिया के मेले में इलेक्ट्रो के नाम से जाना जाने वाला humanoid रोबोट दिखाई दिया। सात फीट लंबा (2.1 मीटर) और वजन 265 पाउंड (120 किलोग्राम), यह आवाज कमांड से चल सकता है, लगभग 700 शब्द (78-आरपीएम रिकॉर्ड प्लेयर का उपयोग करके), धूम्रपान सिगरेट, गुब्बारे उड़ाएं, और उसके सिर और बाहों को ले जाएं । शरीर में एक स्टील गियर कैमरा और एल्यूमीनियम त्वचा द्वारा कवर मोटर कंकाल शामिल था।
1 9 3 9 में कोनराड ज़्यूज़ ने पहले प्रोग्राम करने योग्य इलेक्ट्रोमेकैनिकल कंप्यूटर का निर्माण किया, जो अब एक रोबोट समझा जाने वाला एक humanoid मशीन के निर्माण के लिए नींव रखता है।
1940 के दशक
1 9 41 और 1 9 42 में, इसहाक असिमोव ने रोबोटिक्स के तीन कानून तैयार किए, और इस प्रक्रिया में “रोबोटिक्स” शब्द बनाया गया। 1 9 45 में वन्नेवर बुश ने एएस वी मे थिंक प्रकाशित किया, एक निबंध जिसने इलेक्ट्रॉनिक डेटा प्रोसेसिंग की संभावना की जांच की। उन्होंने कंप्यूटर, डिजिटल वर्ड प्रोसेसर, आवाज पहचान और मशीन अनुवाद के उदय की भविष्यवाणी की। बाद में उन्हें हाइपरटेक्स्ट के आविष्कारक टेड नेल्सन द्वारा श्रेय दिया गया। 1 9 48 में, नॉरबर्ट वीनर ने साइबरनेटिक्स के सिद्धांतों को व्यावहारिक रोबोटिक्स के आधार पर तैयार किया।
जटिल व्यवहार के साथ पहले इलेक्ट्रॉनिक स्वायत्त रोबोट 1 9 48 और 1 9 4 9 में इंग्लैंड के ब्रिस्टल में बर्डेन न्यूरोलॉजिकल इंस्टीट्यूट के विलियम ग्रे वाल्टर द्वारा बनाए गए थे। वह साबित करना चाहते थे कि मस्तिष्क कोशिकाओं की एक छोटी संख्या के बीच समृद्ध कनेक्शन बहुत ही जटिल व्यवहारों को जन्म दे सकते हैं – अनिवार्य रूप से यह कि कैसे मस्तिष्क ने काम किया था, इस बारे में रहस्य था कि यह कैसे तारित किया गया था। 1 9 48 और 1 9 4 9 के बीच उनके पहले रोबोटों का निर्माण 1 9 48 और 1 9 4 9 के बीच किया गया था और उन्हें अक्सर उनके आकार और आंदोलन की धीमी गति के कारण “कछुओं” के रूप में वर्णित किया गया था। तीन पहिया कछुआ रोबोट फोटोटैक्सिस में सक्षम थे, जिसके द्वारा वे बैटरी रिचार्ज पर कम दौड़ते समय रिचार्जिंग स्टेशन तक पहुंच सकते थे।
वाल्टर ने मस्तिष्क प्रक्रियाओं को अनुकरण करने के लिए पूरी तरह से एनालॉग इलेक्ट्रॉनिक्स का उपयोग करने के महत्व पर बल दिया, जब उनके समकालीन लोग एलन ट्यूरिंग और जॉन वॉन न्यूमैन डिजिटल गणना के संदर्भ में मानसिक प्रक्रियाओं के दृष्टिकोण की ओर मोड़ रहे थे। वाल्टर के काम ने रॉडनी ब्रूक्स, हंस मोरावेक और मार्क टिल्डन जैसे रोबोटिक्स शोधकर्ताओं की अगली पीढ़ियों को प्रेरित किया। वाल्टर के “कछुओं” के आधुनिक अवतार बीएएम रोबोटिक्स के रूप में पाए जा सकते हैं।
1950 के दशक
1 9 51 में वाल्टर ने पेपर ए मशीन प्रकाशित की जो कि सीखती है, दस्तावेज करता है कि कैसे उनके उन्नत मैकेनिकल रोबोट ने सशर्त रिफ्लेक्स सीखने का प्रदर्शन करके बुद्धिमान एजेंट के रूप में कार्य किया। 1 9 54 में जॉर्ज देवोल द्वारा पहली डिजिटल संचालित और प्रोग्राम करने योग्य रोबोट का आविष्कार किया गया था और इसे यूनिमाइट कहा जाता था। इसने बाद में आधुनिक रोबोटिक्स उद्योग की नींव रखी।
जापान में रोबोट लोकप्रिय कॉमिक बुक पात्र बन गए। रोबोट सांस्कृतिक प्रतीक बन गए और जापानी सरकार रोबोटिक्स में शोध को वित्त पोषित करने में प्रेरित हुई। सबसे प्रतिष्ठित पात्रों में से एस्ट्रो बॉय था, जिसे प्यार, साहस और आत्म-शक जैसे मानव भावनाओं को पढ़ाया जाता है। सांस्कृतिक रूप से, जापान में रोबोट को उनके मानवीय समकक्षों के सहायक के रूप में माना जाता था ..
1960 के दशक
देवोल ने 1 9 60 में जनरल मोटर्स को पहला यूनिट बेचा, और इसे 1 9 61 में न्यू जर्सी के ईविंग टाउनशिप में एक संयंत्र में डाई कास्टिंग मशीन से धातु के गर्म टुकड़े उठाने और उन्हें ठंडा तरल में रखने के लिए स्थापित किया गया था। “किसी भी प्रशंसकों के बिना, दुनिया का पहला कामकाजी रोबोट 1 9 61 के वसंत में ईविंग टाउनशिप में जनरल मोटर्स प्लांट में असेंबली लाइन में शामिल हो गया …. यह एक स्वचालित मरने वाला मोल्ड था जो लाल गर्म दरवाजे हैंडल और ऐसी अन्य कार गिरा एक लाइन पर ठंडा तरल के पूल में भागों जो उन्हें श्रमिकों के साथ ट्रिमिंग और बफिंग के लिए ले जाया गया। ” पहली डिजिटल संचालित प्रोग्राम करने योग्य रोबोट आर्म के लिए देवोल का पेटेंट आधुनिक रोबोटिक्स उद्योग की नींव का प्रतिनिधित्व करता है।
रांची आर्म को कैलिफ़ोर्निया के डाउनी में रांची लॉस अमीगोस अस्पताल में विकलांग रोगियों की सहायता के लिए रोबोट आर्म के रूप में विकसित किया गया था; इस कंप्यूटर नियंत्रित हाथ को 1 9 63 में स्टैनफोर्ड विश्वविद्यालय द्वारा खरीदा गया था। 1 9 67 में जापान में पहले औद्योगिक रोबोट को उत्पादक उपयोग में डाल दिया गया था। वर्साट्रान रोबोट अमेरिकी मशीन और फाउंड्री द्वारा विकसित किया गया था। एक साल बाद कावासाकी हेवी इंडस्ट्रीज द्वारा यूनिमेशन द्वारा हाइड्रोलिक रोबोट डिज़ाइन का उत्पादन किया गया। मार्विन मिन्स्की ने 1 9 68 में तेंदुए के हाथ का निर्माण किया; हाथ कंप्यूटर नियंत्रित था और इसके 12 जोड़ हाइड्रोलिक द्वारा संचालित थे। 1 9 6 9 में मैकेनिकल इंजीनियरिंग के छात्र विक्टर शिनमैन ने स्टैनफोर्ड आर्म का निर्माण किया, जिसे पहले इलेक्ट्रॉनिक कंप्यूटर-नियंत्रित रोबोटिक बांह के रूप में पहचाना गया था (यूनिमेन्ट के निर्देश चुंबकीय ड्रम पर संग्रहीत किए गए थे)।
1 9 60 के दशक के अंत में वियतनाम युद्ध स्वचालित कमांड प्रौद्योगिकी और सेंसर नेटवर्क के लिए परीक्षण स्थल बन गया। 1 9 66 में मैकनामरा लाइन का उद्देश्य लगभग कोई जमीन बलों की आवश्यकता के उद्देश्य से प्रस्तावित किया गया था। भूकंपीय और ध्वनिक सेंसर के इस सेंसर नेटवर्क, फोटोरकोनाइन्सेंस और सेंसर-ट्रिगर भूमि खानों को केवल उच्च लागत के कारण आंशिक रूप से कार्यान्वित किया गया था। अपने मोबाइल परिवेश के बारे में तर्क करने में सक्षम पहला मोबाइल रोबोट, 1 9 70 में स्टैनफोर्ड रिसर्च इंस्टीट्यूट (अब एसआरआई इंटरनेशनल) द्वारा बनाया गया था। शेकी संयुक्त टीवी सेंसर, लेजर रेंजफिंडर्स, और नेविगेट करने के लिए “टक्कर सेंसर” सहित कई सेंसर इनपुट।
1970 के दशक
1 9 70 के दशक की शुरुआत में सटीक युद्ध और स्मार्ट हथियार विकसित किए गए थे। टर्मिनल मार्गदर्शन को लागू करके हथियार रोबोट बन गए। वियतनाम युद्ध के अंत में पहले लेजर-निर्देशित बम तैनात किए गए थे, जो लक्ष्य पर इंगित किए गए लेजर बीम का पालन करके अपना लक्ष्य पा सकते थे। 1 9 72 के ऑपरेशन लाइनबैकर लेजर-निर्देशित बम के दौरान प्रभावी साबित हुआ, लेकिन अभी भी मानव ऑपरेटरों पर भारी निर्भर था। फायर-एंड-भूल हथियार भी पहले वियतनाम युद्ध में तैनात किए गए थे, एक बार ऑपरेटर से कोई और ध्यान या कार्रवाई की आवश्यकता नहीं थी।
1 9 70 के दशक में जापानी रोबोटिक्स वैज्ञानिकों द्वारा humanoid रोबोटों के विकास में काफी वृद्धि हुई थी। Waseda विश्वविद्यालय ने 1 9 67 में WABOT परियोजना शुरू की, और 1 9 72 में दुनिया के पहले पूर्ण पैमाने पर humanoid बुद्धिमान रोबोट WABOT-1 पूरा किया। इसके अंग नियंत्रण प्रणाली ने इसे निचले अंगों के साथ चलने और स्पर्श संवेदकों का उपयोग करके हाथों से वस्तुओं को पकड़ने और परिवहन करने की अनुमति दी। इसकी दृष्टि प्रणाली ने बाहरी रिसेप्टर्स, कृत्रिम आंखों और कानों का उपयोग करके वस्तुओं को दूरी और दिशाओं को मापने की अनुमति दी। और इसकी बातचीत प्रणाली ने इसे कृत्रिम मुंह के साथ जापानी में एक व्यक्ति के साथ संवाद करने की अनुमति दी। यह इसे पहला एंड्रॉइड बना दिया।
फ्रेडी और फ्रेडी द्वितीय पैट एम्बलर, रॉबिन पॉपप्लेस्टोन, ऑस्टिन टेट और डोनाल्ड मिची द्वारा एडिनबर्ग स्कूल ऑफ इनफॉरमैटिक्स विश्वविद्यालय में बने रोबोट थे, और कई घंटों की अवधि में लकड़ी के ब्लॉक को इकट्ठा करने में सक्षम थे। जर्मन आधारित कंपनी कुका ने दुनिया के पहले औद्योगिक रोबोट का निर्माण छह इलेक्ट्रोमेकैनिकल संचालित अक्षों के साथ किया, जिसे फ़ैमुलस के नाम से जाना जाता है।
1 9 74 में, डेविड सिल्वर ने सिल्वर आर्म को डिजाइन किया, जो मानव हाथों की नकल करने में अच्छी गति से सक्षम था। फीडबैक स्पर्श और दबाव सेंसर द्वारा प्रदान किया गया था और कंप्यूटर द्वारा विश्लेषण किया गया था। एससीएआरए, सिलेक्टिव अनुपालन असेंबली रोबोट आर्म, 1 9 78 में एक कुशल, 4-अक्ष रोबोटिक बांह के रूप में बनाया गया था। भागों को चुनने और उन्हें किसी अन्य स्थान पर रखने के लिए सबसे अच्छा उपयोग किया जाता है, एससीएआरए को 1 9 81 में असेंबली लाइनों में पेश किया गया था।
स्टैनफोर्ड कार्ट ने 1 9 7 9 में कुर्सियों से भरे कमरे को सफलतापूर्वक पार कर लिया। यह मुख्य रूप से नेविगेट करने और दूरी निर्धारित करने के लिए स्टीरियो दृष्टि पर निर्भर था। कार्नेगी मेलॉन विश्वविद्यालय में रोबोटिक्स संस्थान की स्थापना 1 9 7 9 में राज रेड्डी ने की थी।
1980 के दशक
टेको कनाडे ने 1 9 81 में पहली “सीधी ड्राइव आर्म” बनाई। अपनी तरह का पहला, हाथ के मोटर्स रोबोट के भीतर ही थे, लंबे प्रसारण को खत्म कर दिया।
1 9 84 में वाबोट -2 का खुलासा किया गया था; अंग खेलने में सक्षम, वाबोट -2 में 10 उंगलियां और दो फीट थीं। Wabot-2 संगीत के स्कोर और एक व्यक्ति के साथ पढ़ने में सक्षम था।
1 9 86 में, होंडा ने मनुष्यों के साथ सफलतापूर्वक बातचीत करने में सक्षम रोबोट बनाने के लिए अपने humanoid अनुसंधान और विकास कार्यक्रम शुरू किया। 1 9 8 9 में एमआईटी द्वारा चंगेज नामक एक हेक्सापोडल रोबोट का खुलासा किया गया था। निर्माण विधियों के कारण चंगारी जल्दी और सस्ते बनाने के लिए प्रसिद्ध थीं; चंगेज ने 4 माइक्रोप्रोसेसर, 22 सेंसर, और 12 सर्वो मोटर्स का इस्तेमाल किया। रॉडनी ब्रूक्स और अनीता एम। फ्लिन ने “फास्ट, सस्ता, और आउट ऑफ़ कंट्रोल: सौर प्रणाली का एक रोबोट आक्रमण” प्रकाशित किया। पेपर ने उत्पादन समय बढ़ाने और अंतरिक्ष में रोबोट लॉन्च करने में कठिनाई को कम करने के लिए अधिक संख्या में छोटे सस्ता रोबोट बनाने की वकालत की।
1990 के दशक
1 99 4 में एफडीए द्वारा सबसे सफल रोबोट-समर्थित सर्जरी उपकरणों में से एक को मंजूरी दे दी गई थी। साइबरनाइफ का आविष्कार जॉन आर एडलर ने किया था और 1 99 1 में स्टैनफोर्ड यूनिवर्सिटी में पहली प्रणाली स्थापित की गई थी। यह रेडियोसर्जरी सिस्टम रोबोट पोजिशनिंग के साथ एकीकृत छवि-निर्देशित सर्जरी। साइबरनाइफ अब मस्तिष्क या रीढ़ ट्यूमर के रोगियों के इलाज के लिए तैनात किया गया है। एक एक्स-रे कैमरा विस्थापन ट्रैक करता है और श्वास के कारण गति के लिए क्षतिपूर्ति करता है।
बायोमेमेटिक रोबोट रोबोतुना को 1 99 6 में मैसाचुसेट्स इंस्टीट्यूट ऑफ टेक्नोलॉजी में डॉक्टरेट के छात्र डेविड बैरेट ने पानी में तैरने का अध्ययन करने के लिए बनाया था। RoboTuna तैरने और एक ब्लूफिन ट्यूना के समान डिजाइन करने के लिए डिज़ाइन किया गया है [असंबद्धता की आवश्यकता]।
होंडा के पी 2 humanoid रोबोट पहली बार 1996 में दिखाया गया था। “प्रोटोटाइप मॉडल 2” के लिए खड़े, पी 2 होंडा के humanoid विकास परियोजना का एक अभिन्न हिस्सा था; 6 फीट (1.8 मीटर) लंबा, पी 2 अपने पूर्ववर्तियों से छोटा था और इसके गति में अधिक मानव जैसा दिखता था।
केवल सात दिनों के लिए काम करने की उम्मीद है, 1 99 7 में 83 दिनों के ऑपरेशन के बाद सोजोरनर रोवर अंततः बंद हो गया। इस छोटे रोबोट (केवल 23 एलबीएस या 10.5 किलो) ने मंगल पाथफाइंडर मिशन के हिस्से के रूप में मंगल की सतह पर अर्ध-स्वायत्त संचालन किया ; एक बाधा से बचने के कार्यक्रम से लैस, Sojourner ग्रह की सतह का अध्ययन करने के लिए मार्गों की योजना बनाने और नेविगेट करने में सक्षम था। अपने पर्यावरण और आस-पास के परिवेश के बारे में छोटे डेटा के साथ नेविगेट करने की सॉजोरनर की क्षमता ने इसे अनियोजित घटनाओं और वस्तुओं पर प्रतिक्रिया करने की अनुमति दी।
1 99 8 में कंपनी की सतत humanoid परियोजना के हिस्से के रूप में पी 3 humanoid रोबोट होंडा द्वारा खुलासा किया गया था। 1 999 में, सोनी ने एआईबीओ, एक रोबोटिक कुत्ता पेश किया जो मनुष्यों के साथ बातचीत करने में सक्षम था; जापान में जारी किए गए पहले मॉडल 20 मिनट में बेचे गए। होंडा ने 2000 में अपने humanoid परियोजना का सबसे उन्नत परिणाम पता चला, ASIMO नाम दिया। एएसआईएमओ चल सकता है, चल सकता है, मनुष्यों के साथ संवाद कर सकता है, चेहरे, पर्यावरण, आवाज़ें और मुद्रा को पहचान सकता है, और अपने पर्यावरण से बातचीत कर सकता है। सोनी ने सोनी के ड्रीम रोबोट्स, मनोरंजन के लिए विकास में छोटे humanoid रोबोट भी प्रकट किया। अक्टूबर 2000 में, संयुक्त राष्ट्र ने अनुमान लगाया कि दुनिया में 742,500 औद्योगिक रोबोट थे, जिनमें से आधे से अधिक जापान में उपयोग किए जा रहे थे।
2001-वर्तमान
अप्रैल 2001 में, कनाडाम 2 कक्षा में लॉन्च किया गया था और अंतरराष्ट्रीय अंतरिक्ष स्टेशन से जुड़ा हुआ था। कनाडाम 2 अंतरिक्ष शटल द्वारा उपयोग की जाने वाली बांह का एक बड़ा, अधिक सक्षम संस्करण है, और इसे “स्मार्ट” के रूप में माना जाता है। अप्रैल में, मानव रहित एरियल वाहन ग्लोबल हॉक ने दक्षिणी ऑस्ट्रेलिया में आरएएएफ बेस एडिनबर्ग में कैलिफ़ोर्निया में एडवर्ड्स वायुसेना बेस से प्रशांत महासागर पर पहली स्वायत्त गैर-स्टॉप उड़ान बनाई। उड़ान 22 घंटे में बनाई गई थी।
लोकप्रिय रूमबा, एक रोबोटिक वैक्यूम क्लीनर, 2002 में पहली बार कंपनी iRobot द्वारा जारी किया गया था।
2005 में, कॉर्नेल विश्वविद्यालय ने आत्म-प्रतिकृति के लिए सक्षम रोबोट का खुलासा किया; अपने आप को प्रतिलिपि बनाने में सक्षम पहला रोबोट, संलग्न करने और अलग करने में सक्षम क्यूब्स का एक सेट। 2003 में लॉन्च किया गया, 3 और 24 जनवरी को, मंगल ग्रह रोटी आत्मा और अवसर मंगल की सतह पर उतरा। दोनों रोबोटों ने मूल रूप से अपेक्षित दूरी की कई बार चलाई, और अवसर 2018 के मध्य तक चल रहा था, हालांकि बड़े धूल तूफान के कारण संचार बाद में खो गया था।
स्व-ड्राइविंग कारों ने 2005 के आसपास अपनी उपस्थिति बनाई थी, लेकिन सुधार के लिए जगह थी। डीएआरपीए ग्रैंड चैलेंज (2004) में प्रतिस्पर्धा करने वाले 15 उपकरणों में से कोई भी सफलतापूर्वक कोर्स पूरा नहीं कर पाया; वास्तव में कोई रोबोट 150 मिलियन मील (240 किमी) ऑफ रोड कोर्स के 5% से अधिक सफलतापूर्वक नेविगेट नहीं हुआ, जिससे $ 1 मिलियन पुरस्कार अनधिकृत हो गया। 2005 में, होंडा ने अपने एसिमो रोबोट का एक नया संस्करण प्रकट किया, जो नए व्यवहार और क्षमताओं के साथ अद्यतन हुआ। 2006 में, कॉर्नेल विश्वविद्यालय ने अपने “स्टारफिश” रोबोट का खुलासा किया, एक चार पैर वाली रोबोट स्वयं मॉडलिंग [स्पष्टीकरण की आवश्यकता] और क्षतिग्रस्त होने के बाद चलने के लिए सीखने में सक्षम है। 2007 में, टोमी ने मनोरंजन रोबोट, आई-सोबोट, एक humanoid bipedal रोबोट लॉन्च किया जो एक इंसान की तरह चल सकता है और “विशेष क्रिया मोड” के तहत कुछ मनोरंजक चाल और विशेष क्रियाएं करता है।
अंतरिक्ष यात्री सहायकों की नवीनतम पीढ़ी रोबोनॉट 2 को 2011 में एसटीएस -13 मिशन पर अंतरिक्ष शटल डिस्कवरी पर अंतरिक्ष स्टेशन पर लॉन्च किया गया था। यह अंतरिक्ष में पहला humanoid रोबोट है, और हालांकि इसके लिए प्राथमिक नौकरी इंजीनियरों को पढ़ाना है अंतरिक्ष में devxtrous रोबोट व्यवहार करते हैं; आशा है कि उन्नयन और उन्नति के माध्यम से, यह स्टेशन के बाहर एक दिन उद्यम हो सकता है ताकि अंतरिक्ष यात्री मरम्मत या जोड़ों को स्टेशन में कर सकें या वैज्ञानिक कार्य कर सकें।
रियाद में भविष्य निवेश सम्मेलन में 25 अक्टूबर 2017 को, सोफिया नामक एक रोबोट और मादा सर्वनाम के साथ संदर्भित किया गया था, जिसे सऊदी अरब नागरिकता दी गई थी, जो राष्ट्रीयता रखने वाला पहला रोबोट बन गया था। इसने विवाद को आकर्षित किया है, क्योंकि यह स्पष्ट नहीं है कि क्या इसका तात्पर्य है कि सोफिया वोट दे सकता है या शादी कर सकता है, या क्या जानबूझकर सिस्टम शटडाउन को हत्या माना जा सकता है; साथ ही, यह विवादास्पद है कि सऊदी मानव महिलाओं को कुछ अधिकार दिए गए हैं।
वाणिज्यिक और औद्योगिक रोबोट अब व्यापक रूप से काम कर रहे हैं और अधिक सस्ते या मानवों की तुलना में अधिक सटीकता और विश्वसनीयता के साथ काम कर रहे हैं। वे उन कार्यों के लिए भी नियोजित होते हैं जो मनुष्यों के लिए उपयुक्त होने के लिए बहुत गंदे, खतरनाक या सुस्त होते हैं। रोबोट का निर्माण विनिर्माण, असेंबली और पैकिंग, परिवहन, पृथ्वी और अंतरिक्ष अन्वेषण, सर्जरी, हथियार, प्रयोगशाला अनुसंधान, और उपभोक्ता और औद्योगिक वस्तुओं के बड़े पैमाने पर उत्पादन में व्यापक रूप से किया जाता है।
कंप्यूटर हार्डवेयर और डेटा प्रबंधन सॉफ्टवेयर में हालिया प्रगति के साथ, मनुष्यों के कृत्रिम प्रतिनिधित्व भी व्यापक हो रहे हैं। उदाहरणों में ओपनएमआरएस और ईएमआरबॉट शामिल हैं।