Les synchroniseurs ou générateurs virtuels synchrones sont des onduleurs qui imitent les générateurs synchrones pour fournir une « inertie synthétique » aux services auxiliaires des systèmes d’alimentation électrique.

Figure 1. Un schéma simple de l’environnement d’exploitation Synchronverter
Contexte
Les onduleurs standard sont des éléments à faible inertie. Pendant les périodes transitoires, qui sont principalement dues à des défauts ou à des changements brusques de charge, elles suivent rapidement les changements et peuvent entraîner une situation plus difficile, mais les générateurs synchrones ont une inertie notable pouvant maintenir leur stabilité.
Récemment, en utilisant de plus en plus d’énergies renouvelables, en particulier des cellules solaires, de plus en plus d’onduleurs ont été utilisés dans les réseaux, ce qui pourrait compromettre la fiabilité du réseau.
Histoire
Hydro-Québec a commencé à exiger une inertie synthétique en 2005 en tant que premier exploitant de réseau. Pour contrer la baisse de fréquence, l’exploitant du réseau exige une augmentation de puissance temporaire de 6% en combinant l’électronique de puissance avec l’inertie de rotation d’un rotor d’éolienne. Des exigences similaires sont entrées en vigueur en Europe en 2016.
Modèle Synchronverter
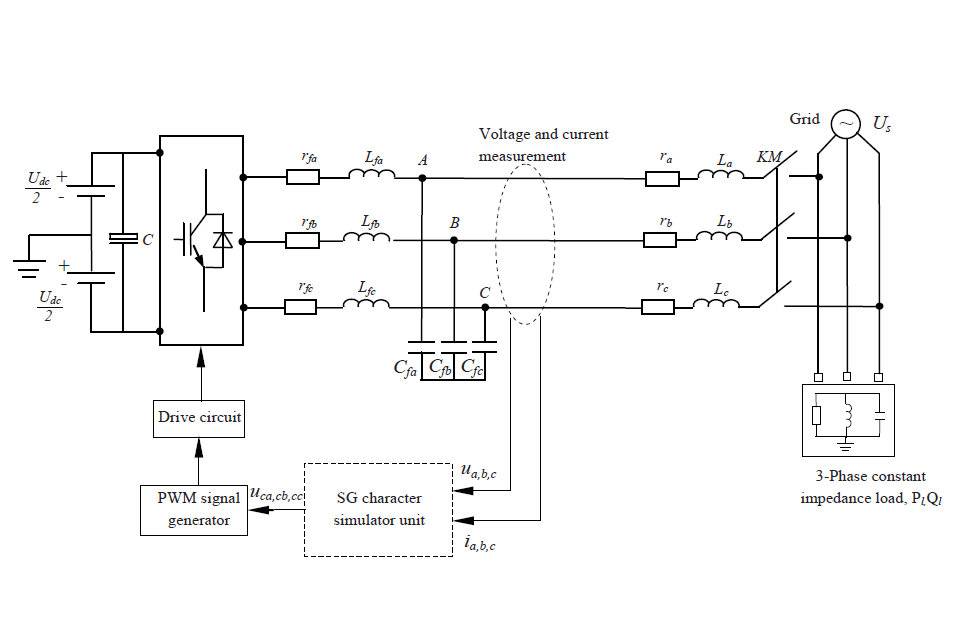
La structure du synchroniseur peut être divisée en deux parties: la partie puissance (voir figure 2) et la partie électronique. La partie puissance est la voie de transformation et de transfert d’énergie, y compris le pont, le circuit de filtrage, la ligne d’alimentation, etc. La partie électronique se réfère aux unités de mesure et de contrôle, y compris les capteurs et les DSP.

Figure 2. Partie puissance d’un synchroniseur
Le point important dans la modélisation du synchroniseur est de s’assurer qu’il a un comportement dynamique similaire à celui du générateur synchrone (voir figure 3). Ce modèle est classé en modèle de 2 à 7 commandes, en raison de sa complexité. Cependant, le modèle à 3 ordres est largement utilisé en raison du compromis approprié entre précision et complexité.
où et sont des composantes dq-axes de la tension terminale.





Figure 3. Modèle par phase d’un SG connecté à un bus infini
Stratégie de contrôle
Comme le montre la figure 3, lorsque l’onduleur est commandé en tant que source de tension, il se compose d’une unité de synchronisation à synchroniser avec le réseau et d’une boucle de puissance pour réguler la puissance réelle et la puissance réactive échangée avec le réseau. L’unité de synchronisation doit souvent fournir une fréquence et une amplitude. Mais lorsque l’onduleur est contrôlé en tant que source de courant, l’unité de synchronisation est souvent nécessaire pour fournir uniquement la phase du réseau. Il est donc beaucoup plus facile de la contrôler en tant que source de courant.
Comme un synchrone est intrinsèquement capable de se synchroniser avec la grille, il est possible d’intégrer la fonction de synchronisation dans le contrôleur de puissance sans unité de synchronisation. Cela se traduit par une unité de contrôle compacte, comme le montre la figure 4.

Figure 4. Structures de contrôle types pour un onduleur connecté au réseau (a) Lorsqu’elle est contrôlée en tant que source de tension (b) Lorsqu’elle est contrôlée en tant que source de courant.
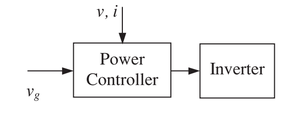
Figure 5. Structure de commande compacte pour un onduleur connecté au réseau.
Applications
PV
Comme mentionné précédemment, les synchroniseurs peuvent être traités comme un générateur synchrone, ce qui facilite le contrôle de la source. Il doit donc être largement utilisé dans les sources d’énergie primaire PV (PES).
HVDC
Éolienne
Microgrid DC
Synchronverter est également suggéré pour être utilisé dans les microréseaux, car les sources DC peuvent être coordonnées avec la fréquence de la tension alternative, sans aucun réseau de communication.

Figure 6. Partie puissance du synchroniseur triphasé.