En robotique, un paradigme robotique est un modèle mental du fonctionnement d’un robot. Un paradigme robotique peut être décrit par la relation entre les trois primitives de la robotique: Sense Plan Act. Cela peut également être décrit par la manière dont les données sensorielles sont traitées et distribuées dans le système, et où les décisions sont prises.
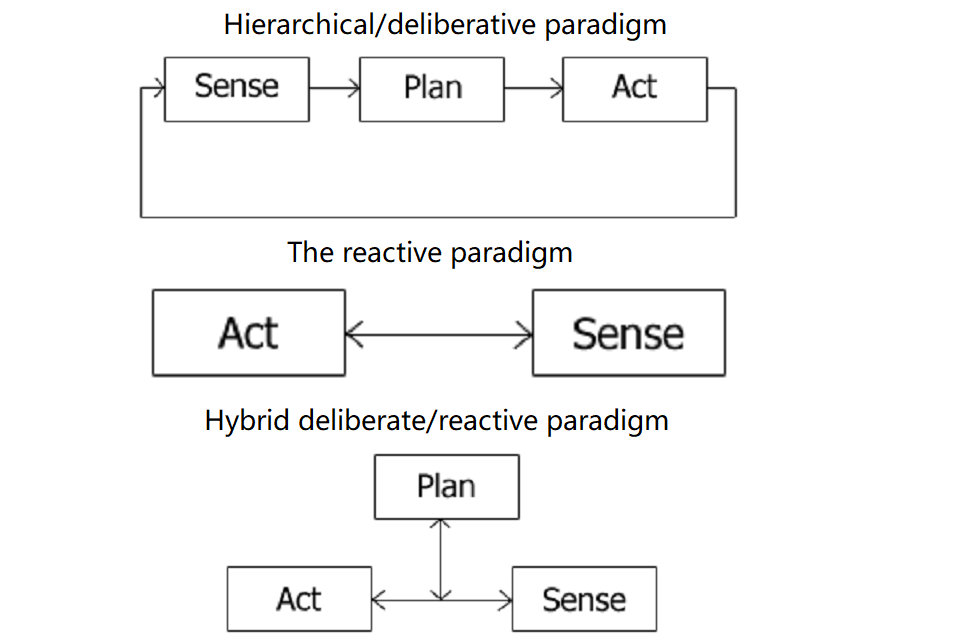
Paradigme hiérarchique / délibératif
Le robot fonctionne de manière descendante et demande beaucoup de planification.
Le robot détecte le monde, planifie la prochaine action, agit; à chaque étape, le robot planifie explicitement le prochain mouvement.
Toutes les données de détection ont tendance à être rassemblées dans un seul modèle mondial.
Le paradigme réactif
Type d’organisation sensée.
Le robot dispose de plusieurs instances de couplages Sense-Act.
Ces couplages sont des processus simultanés, appelés comportements, qui exploitent les données de détection locales et calculent la meilleure action à prendre indépendamment de ce que font les autres processus.
Le robot fera une combinaison de comportements.
Paradigme hybride délibéré / réactif
Le robot planifie d’abord (délibère) la meilleure manière de décomposer une tâche en sous-tâches (également appelée «planification de la mission»), puis quels sont les comportements appropriés pour accomplir chaque tâche.
Ensuite, les comportements commencent à s’exécuter conformément au paradigme réactif.
L’organisation de la détection est également un mélange de styles hiérarchique et réactif; les données du capteur sont acheminées vers chaque comportement nécessitant ce capteur, mais sont également disponibles pour le planificateur pour la construction d’un modèle mondial global orienté tâche.