4-dimensional printing (4D printing; also known as 4D bioprinting, active origami, or shape-morphing systems) uses the same techniques of 3D printing through computer-programmed deposition of material in successive layers to create a three-dimensional object. However, 4D printing adds the dimension of transformation over time. It is therefore a type of programmable matter, wherein after the fabrication process, the printed product reacts with parameters within the environment (humidity, temperature, etc.,) and changes its form accordingly. The ability to do so arises from the near infinite configurations at a micrometer resolution, creating solids with engineered molecular spatial distributions and thus allowing unprecedented multifunctional performance. 4D printing is a relatively new advance in biofabrication technology, rapidly emerging as a new paradigm in disciplines such as bioengineering, materials science, chemistry, and computer sciences.
The 4D-printing, like the 3-D printing is a process in which the material layer by layer is applied and so three-dimensional objects (workpieces) are generated, but here also the fourth dimension, time, is considered for finished workpieces. As a result, the objects can move and / or change under a certain sensory trigger, such as when in contact with water, heat, vibration or sound (intelligent material). The 4D printing is at an early stage of development and combines several sciences such as bioengineering, materials science and engineering, chemistry and computer science and engineering.
Hypothetical applications
The possible conceivable application areas are:
House and garden (eg automatic construction of furniture, adapting lawn field)
Building security, architecture, environmental protection and energy technology (eg self-regenerating pipes)
Clothing and textile industry (eg for adaptation to the weather)
Aerospace engineering, transport and traffic engineering (eg adaptation of the material to environmental conditions, shape-changing spacesuit, self-building barriers)
Medical technology and biology (eg growing implants, bioprinters)
Printing techniques
Stereolithography is a 3D-printing technique that uses photopolymerization to bind substrate that has been laid layer upon layer, creating a polymeric network. As opposed to fused-deposition modeling, where the extruded material hardens immediately to form layers, 4D printing is fundamentally based in stereolithography, where in most cases ultraviolet light is used to cure the layered materials after the printing process has completed. Anisotropy is vital in engineering the direction and magnitude of transformations under a given condition, by arranging the micromaterials in a way so that there is an embedded directionality to the finished print.
Pattern-driven 4D Printing
It is possible, through 4D printing, to achieve rapid and accurate manufacturing methods for controlling spatial self-bending actuation in custom-designed soft structures. Spatial and temporal transformations can be realized through several actuation mechanisms such as liquid crystal gel phase transition, thermal expansion coefficient, thermal conductivity discrepancies, and the different swelling and de-swelling ratios of bi-layer or composite beams. One approach to model 4D printing is to control 3D-printing parameters, such as different spatial patterns of hinges affecting the response time and bending angle of the 4D print products. A parametric model of physical properties of shape memory polymer panes incorporating 3D printed patterns was developed to that end. The proposed model predicts the final shape of the actuator with an excellent qualitative agreement with experimental studies. These validated results can guide the design of functional pattern-driven 4D printings.
Fiber architecture
Most 4D printing systems utilize a network of fibers that vary in size and material properties. 4D printed components can be designed on the macro scale as well as the micro scale. Micro scale design is achieved through complex molecular/fiber simulations that approximate the aggregated material properties of all the materials used in the sample. The size, shape, modulus, and connection pattern of these material building blocks have a direct relationship to the deformation shape under stimulus activation.
Hydro-reactive polymers/hydrogels
Skylar Tibbits is the director of the Self-Assembly Lab at MIT, and worked with the Stratasys Materials Group to produce a composite polymer composed of highly hydrophilic elements and non-active, rigid elements. The unique properties of these two disparate elements allowed up to 150% swelling of certain parts of the printed chain in water, while the rigid elements set structure and angle constraints for the transformed chain. Tibbits et al. produced a chain that would spell “MIT” when submerged in water, and another chain that would morph into a wireframe cube when subjected to the same conditions.
Cellulose composites
Thiele et al. explored the possibilities of a cellulose-based material that could be responsive to humidity. They developed a bilayer film using cellulose steraroyl esters with different substitution degrees on either side. One ester had a substitution degree of 0.3 (highly hydrophilic) and the other had a substitution degree of 3 (highly hydrophobic.) When the sample was cooled from 50 °C to 22 °C, and the relative humidity increased from 5.9% to 35%, the hydrophobic side contracted and the hydrophilic side swelled, causing the sample to roll up tightly. This process is reversible, as reverting the temperature and humidity changes caused the sample to unroll again.
Understanding anisotropic swelling and mapping the alignment of printed fibrils allowed A. Sydney Gladman et al. to mimic the nastic behavior of plants. Branches, stems, bracts, and flowers respond to environmental stimuli such as humidity, light, and touch by varying the internal turgor of their cell walls and tissue composition. Taking precedent from this, the team developed a composite hydrogel architecture with local anisotropic swelling behavior that mimics the structure of a typical cell wall. Cellulose fibrils combine during the printing process into microfibrils with a high aspect ratio (~100) and an elastic modulus on the scale of 100 GPa. These microfibrils are embedded into a soft acrylamide matrix for structure. The viscoelastic ink used to print this hydrogel composite is an aqueous solution of N,N-dimethylacrylamide, nanoclay, glucose oxidase, glucose, and nanofibrillated cellulose. The nanoclay is a rheological aid that improves liquid flow, and the glucose prevents oxygen inhibition when the material is cured with ultraviolet light. Experimenting with this ink, the team created a theoretical model for a print path that dictates the orientation of cellulose fibrils, where the bottom layer of the print is parallel to the x-axis and the top layer of the print is rotated anticlockwise by an angle θ. The curvature of the sample is dependent on elastic moduli, swelling ratios, and ratios of layer thickness and bilayer thickness. Thus, the adjusted models that describe mean curvature and Gaussian curvature are, respectively,

and

Gladman et al. found that as θ approaches 0°, the curvature approximates the classical Timoshenko equation and performs similarly to a bimetallic strip. But as θ approaches 90°, the curvature transforms into a saddle shape. Understanding this, then, the team could carefully control the effects of anisotropy and break lines of symmetry to create helicoids, ruffled profiles, and more.
David Correa et al. is working with wood composite materials that change shape based on their printed grain direction and anisotropic swelling when water is absorbed. This work is 3D printed and studied on the macro scale rather than micro scale, with layer heights at fractions of millimeters rather than microns. The filament used in this research is a wood composite which is 60% co-polyester and 40% cellulose. The co-polyester binds the cellulose together while the cellulose provides the hygroscopic properties to the composite. Two methods have been developed for this kind of printing. The first method uses only the wood composite material. Designed deformation shape is printed by controlling the grain pattern, grain orientation, print layer thickness, and print layer interaction. In this method, hygroscopic bending occurs perpendicular to the grain direction. The second method uses both the wood composite as well as standard 3D printing plastics. This is an extension of the first method that introduces a separate layer of non-hygroscopic material that will not swell when exposed to water. This idea builds off of previous research of thermal bimetal properties based on their relative expansion. Hygroscopic bending occurs only within the wood composite layers when prints of this method are exposed to water. Therefore, deformation shape is a product of both the patterning of material layers as well as the grain of the wood composite layers, offering quicker and more severe deformation than wood composite construction alone. Both methods allow their materials to deform when subject to moisture, as well as regain their shape. The quickest method observed for shape change is by fully submerging prints in warm water.
Thermo-reactive polymers/hydrogels
Poly(N-isopropylacrylamide), or pNIPAM, is a commonly used thermo-responsive material. A hydrogel of pNIPAM becomes hydrophilic and swollen in an aqueous solution of 32 °C, its low critical solution temperature. Temperatures above that start to dehydrate the hydrogel and cause it shrink, thus achieving shape transformation. Hydrogels composed of pNIPAM and some other polymer, such as 4-hydroxybutyl acrylate (4HBA,) exhibit strong reversibility, where even after 10 cycles of shape change there is no shape deformation. Shannon E. Bakarich et al. created a new type of 4D-printing ink composed of ionic covalent entanglement hydrogels that have a similar structure to standard double-network hydrogels. The first polymer network is cross-linked with metal cations, while the second is cross-linked with covalent bonds. This hydrogel is then paired with a pNIPAM network for toughening and thermal actuation. In lab testing, this gel showed a shape recovery of 41%-49% when the temperature increased 20–60 °C (68–140 °F), and then was restored to 20 °C. A fluid controlling smart valve printed from this material was designed to close when touching hot water and open when touching cold water. The valve successfully stayed open in cold water and reduced the flow rate of hot water by 99%. This new type of 4D-printed hydrogel is more mechanically robust than other thermally actuating hydrogels and shows potential in applications such as self-assembling structures, medical technology, soft robotics, and sensor technology.
Digital Shape-Memory Polymers
Shape-memory polymers (SMPs) are able to recover their original shape from a deformed shape under certain circumstances, such as when exposed to a temperature for a period of time. Depending on the polymer, there may be a variety of configurations that the material may take in a number of temperature conditions. Digtial SMPs utilize 3D-printing technology to precisely engineer the placement, geometry, and mixing and curing ratios of SMPs with differing properties, such as glass transition or crystal-melt transition temperatures. Yiqi Mao et al. used this to create a series of digital SMP hinges that have differing prescribed thermo-mechanical and shape memory behaviors, which are grafted onto rigid, non-active materials. Thus, the team was able to develop a self-folding sample that could fold without interfering with itself, and even interlock to create a more robust structure. One of the projects include a self-folding box modeled after a USPS mailbox.
Qi Ge et al. designed digital SMPs based on constituents with varying rubbery moduli and glass-transition temperatures with extremely high-failure strains of up to 300% larger than existing printable materials. This allowed them to create a multi-material gripper that could grab and release an object according to a temperature input. The thick joints were made of SMPs for robustness, while the tips of the microgrippers could be designed separately to accommodate a safe contact for the object of transport.
Stress relaxation
Stress relaxation in 4D printing is a process in which a material assembly is created under stress that becomes “stored” within the material. This stress can later be released, causing an overall material shape change.
Thermal photo-reactive polymers
This type of polymeric actuation can be described as photo-induced stress relaxation.
This technology takes advantage of temperature driven polymer bending by exposing the desired bending seams to focused strips of intense light. These bending seams are printed in a state of stress but do not deform until exposed to light. The active agent that induces bending in the material is heat transmitted by intense light. The material itself is made of chemical photo-reactive polymers. These compounds use a polymer mixture combined with a photoinitiator to create an amorphous, covalently cross-linked polymer. This material is formed into sheets and loaded in tension perpendicular to the desired bending crease. The material is then exposed to a specific wavelength of light, as the photoinitiator is consumed it polymerizes the remaining mixture, inducing photoinitiated stress relaxation. The portion of material exposed to the light can be controlled with stencils to create specific bending patterns. It is also possible to run multiple iterations of this process using the same material sample with different loading conditions or stencil masks for each iteration. The final form will depend on the order and resulting form of each iteration.
Current applications
Architecture
Common adaptive facades and opening roofs require intricate mechanical systems to operate which are often difficult to install and frequently malfunction. 4D printed facades would offer simplicity of installation and direct actuation caused by weather conditions, eliminating any need for a larger controlling system or input energy.
Biomedical
The research team of Shida Miao et al. created a new type of 4D-printable, photo-curable liquid resin. This resin is made of a renewable soybean-oil epoxidized acrylate compound that is also biocompatible. This resin adds to the small group of 3D-printable resins and is one of the few that are biocompatible. A laser 3D-printed sample of this resin was subjected to temperature fluctuations from -18 °C to 37 °C and exhibited full recovery of its original shape. Printed scaffolds of this material proved to be successful foundations for human bone marrow mesenchymal stem cell (hMSCs) growth. This material’s strong qualities of shape memory effect and biocompatibility lead researchers to believe that it will strongly advance the development of biomedical scaffolds. This research article is one of the first that explores the use of plant oil polymers as liquid resins for stereolithography production in biomedical applications.
Research team of Leonid Ionov (University of Bayreuth) has developed novel approach to print shape-morphing biocompatible/biodegradable hydrogels with living cells. The approach allows fabrication of hollow self-folding tubes with unprecedented control over their diameters and architectures at high resolution. The versatility of the approach is demonstrated by employing two different biopolymers (alginate and hyaluronic acid) and mouse bone marrow stromal cells. Harnessing the printing and post-printing parameters allows attaining average internal tube diameters as low as 20 µm, which is not yet achievable by other existing bioprinting approaches and is comparable to the diameters of the smallest blood vessels. The proposed 4D bioprinting process does not pose any negative effect on the viability of the printed cells, and the self-folded hydrogel-based tubes support cell survival for at least 7 days without any decrease in cell viability. Consequently, the presented 4D bioprinting strategy allows the fabrication of dynamically reconfigurable architectures with tunable functionality and responsiveness, governed by the selection of suitable materials and cells.
Possible Applications
There are some existing techniques/technologies that could potentially be applied and adjusted for 4D printing.
Cell Traction Force
Cell Traction Force (CTF) is a technique wherein living cells fold and move microstructures into their designed shape. This is possible through the contraction that occurs from actin polymerization and actomyosin interactions within the cell. In natural processes, CTF regulates wound healing, angiogenesis, metastasis, and inflammation. Takeuchi et al. seeded cells across two microplates, and when the glass structure was removed the cells would bridge the gap across the microplate and thus initiate self-folding. The team was able to create vessel-like geometries and even high throughput dodecahedrons with this method. There is speculation that utilizing this technique of cell origami will lead to designing and printing a cell-laden structure that can mimic their non-synthetic counterparts after the printing process has completed.
Electrical and Magnetic Smart Materials
The electrical responsive materials that exist today change their size and shape depending on the intensity and/or direction of an external electric field. Polyaniline and polypyrrole (PPy) are, in particular, good conducting materials and can be doped with tetrafluoroborate to contract and expand under an electric stimulus. A robot made of these materials was made to move using an electric pulse of 3V for 5 seconds, causing one leg to extend, then removing the stimulus for 10 seconds, causing the other leg to move forward. Research on carbon nanotubes, which are biocompatible and highly conductive, indicates that a composite made of carbon nanotube and a shape memory specimen has a higher electrical conductivity and speed of electro-active response than either specimen alone. Magnetically responsive ferrogels contract in the presence of a strong magnetic field and thus have applications in drug and cell delivery. The combination of carbon nanotubes and magnetically responsive particles has been bioprinted for use in promoting cell growth and adhesion, while still maintaining a strong conductivity. This is an exciting prospect for 4D printing electrical-magnetic bioinks into precisely engineered structures for biomedical applications, but more research needs to be done on local changes of pH value and temperature of the medium when the stimulus occurs to prevent adverse effects on neighboring cells.
Commerce and transportation
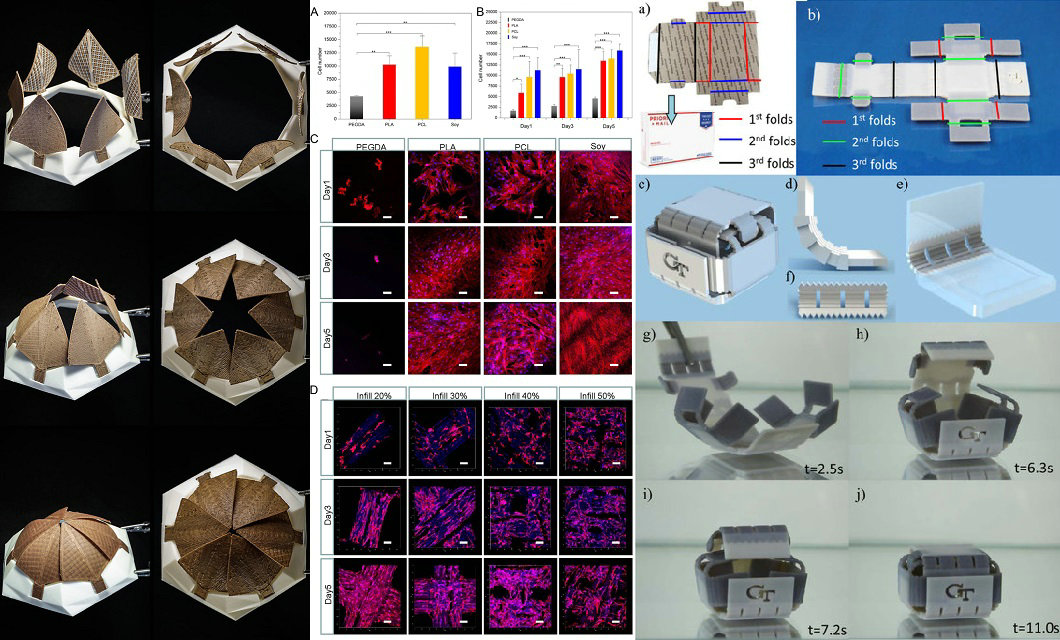
Skylar Tibbits elaborates on future applications of 4D-printed materials as programmable products that can be tailored to specific environments and respond to factors such as the temperature, humidity, pressure, and sound of one’s body or environment. Tibbits also mentions the advantage of 4D-printing for shipping applications – it will allow products to be packaged flat to later have their designed shape activated on site by a simple stimulus. There is also the possibility of 4D-printed shipping containers that react to forces in transit to uniformly distribute loads. It is very likely that 4D-printed materials will be able to repair themselves after failure. These materials will be able to self-disassemble, making their constituent parts easy to recycle.
Advantages and disadvantages
By using 4D printing processes, objects can be transported in a more space-saving and cost-effective manner. In addition, in contrast to 3D printing, even a sensory triggered movement or deformation can be created, which turns the objects into intelligent materials.
The technology is in an early stage of development where many questions remain unanswered. For some applications, other sensory systems are currently more useful or at least less expensive.
Source from Wikipedia