La dinámica pasiva se refiere al comportamiento dinámico de los actuadores, robots u organismos cuando no se extrae energía de un suministro (por ejemplo, baterías, combustible, ATP). Dependiendo de la aplicación, considerar o alterar la dinámica pasiva de un sistema motorizado puede tener efectos drásticos en el rendimiento, particularmente en la economía de energía, la estabilidad y el ancho de banda de la tarea. Los dispositivos que no utilizan una fuente de alimentación se consideran «pasivos», y su comportamiento está completamente descrito por su dinámica pasiva.
En algunos campos de la robótica (en particular, la robótica), el diseño y el control más relajado de la dinámica pasiva se han convertido en un enfoque complementario (o incluso alternativo) de los métodos de control de posicionamiento conjunto desarrollados hasta el siglo XX. Además, la dinámica pasiva de los animales ha sido de interés para los biomecánicos y los biólogos integradores, ya que estas dinámicas a menudo subyacen a los movimientos biológicos y se combinan con el control neuromecánico.
Los campos particularmente relevantes para la investigación y la ingeniería de la dinámica pasiva incluyen la locomoción y manipulación de las patas.
Historia
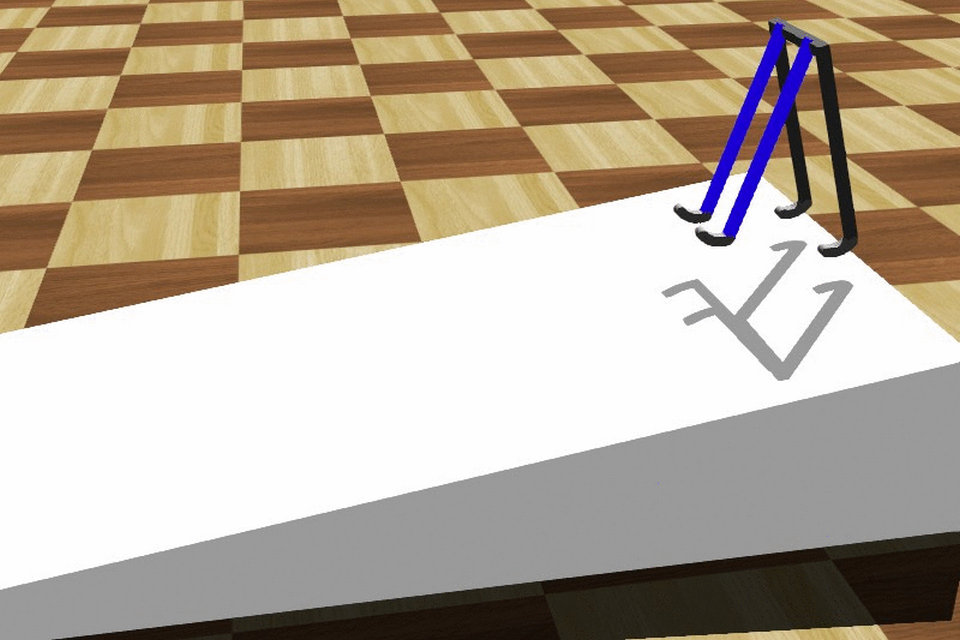
El término y sus principios fueron desarrollados por Tad McGeer a finales de los años ochenta. Mientras estaba en la Universidad Simon Fraser en Burnaby, Columbia Británica, McGeer demostró que un marco similar a un humano puede caminar por una pendiente sin necesidad de músculos o motores. A diferencia de los robots tradicionales, que gastan energía mediante el uso de motores para controlar cada movimiento, las máquinas pasivas y dinámicas de McGeer se basaron únicamente en la gravedad y el balanceo natural de sus extremidades para avanzar una pendiente.
Modelos
El modelo original para la dinámica pasiva se basa en movimientos de piernas de humanos y animales. Los sistemas completamente accionados, como las patas del robot Honda Asimo, no son muy eficientes porque cada junta tiene un motor y un conjunto de control. Las andanzas de tipo humano son mucho más eficientes porque el movimiento es sostenido por el giro natural de las piernas en lugar de los motores colocados en cada articulación.
El documento de 1990 de Tad McGeer «Pasivo con las rodillas» ofrece una excelente visión general de las ventajas de las rodillas para las piernas que caminan. Demuestra claramente que las rodillas tienen muchas ventajas prácticas para los sistemas de caminar. Las rodillas, según McGeer, resuelven el problema de los pies que chocan con el suelo cuando la pierna se mueve hacia adelante, y también ofrece más estabilidad en algunas configuraciones.
La dinámica pasiva es una adición valiosa al campo de los controles porque se aproxima al control de un sistema como una combinación de elementos mecánicos y eléctricos. Si bien los métodos de control siempre se han basado en las acciones mecánicas (física) de un sistema, la dinámica pasiva utiliza el descubrimiento de la computación morfológica. La computación morfológica es la capacidad del sistema mecánico para cumplir funciones de control.
Aplicando dinámicas pasivas.
La adición de la acción a los paseantes dinámicos da como resultado andadores robóticos altamente eficientes. Dichos andadores pueden implementarse con una masa más baja y consumir menos energía porque caminan de manera efectiva con solo un par de motores. Esta combinación da como resultado un «costo de transporte específico» superior.
La eficiencia energética en el transporte terrestre a nivel se cuantifica en términos del «costo específico del transporte» adimensional, que es la cantidad de energía requerida para llevar una unidad de peso por unidad de distancia. Los caminantes dinámicos pasivos, como el Corned Efficient Biped, tienen el mismo costo específico de transporte que los humanos, 0.20. No incidentalmente, los caminantes dinámicos pasivos tienen un modo de andar humano. En comparación, el ASIMO bípedo de Honda, que no utiliza la dinámica pasiva de sus propias extremidades, tiene un costo de transporte específico de 3.23.
El récord de distancia actual para los robots caminantes, 65,17 km, está en manos de la dinámica pasiva Cornell Ranger.
La dinámica pasiva ha encontrado recientemente un papel en el diseño y control de las prótesis. Dado que la dinámica pasiva proporciona los modelos matemáticos de movimiento eficiente, es una vía adecuada para desarrollar extremidades eficientes que requieren menos energía para los amputados. Andrew Hansen, Steven Gard y otros han realizado una extensa investigación para desarrollar mejores prótesis de pie utilizando dinámicas pasivas.
Los robots bípedos pasivos pasivos exhiben diferentes tipos de comportamientos caóticos, por ejemplo, bifurcación, intermitencia y crisis.