El manipulador móvil es hoy en día un término generalizado para referirse a sistemas de robot construidos a partir de un brazo manipulador robótico montado en una plataforma móvil. Tales sistemas combinan las ventajas de las plataformas móviles y los brazos manipuladores robóticos y reducen sus inconvenientes. Por ejemplo, la plataforma móvil amplía el espacio de trabajo del brazo, mientras que un brazo ofrece varias funcionalidades operativas.
Descripción
Un sistema de manipulación móvil ofrece una doble ventaja de movilidad ofrecida por una plataforma móvil y la destreza ofrecida por el manipulador. La plataforma móvil ofrece espacio de trabajo ilimitado para el manipulador. Los grados adicionales de libertad de la plataforma móvil también brindan al usuario más opciones. Sin embargo, la operación de tal sistema es un desafío debido a los muchos grados de libertad y al entorno no estructurado en el que se desempeña.
Composición general del sistema:
Plataforma móvil
Robot manipulador
Visión
Estampación
Motivación
En este momento, la manipulación móvil es un tema de gran interés en los entornos de desarrollo e investigación, y los manipuladores móviles, ya sean autónomos o teleoperados, se utilizan en muchas áreas, por ejemplo, exploración espacial, operaciones militares, atención domiciliaria y atención médica. Sin embargo, dentro del campo industrial, la implementación de manipuladores móviles ha sido limitada, aunque las necesidades de automatización inteligente y flexible están presentes. Además, las entidades tecnológicas necesarias (plataformas móviles, manipuladores de robots, visión y herramientas) son, en gran medida, componentes disponibles en el mercado.
Una razón para esto es que las industrias manufactureras actúan tradicionalmente y, por lo tanto, se muestran reticentes a asumir riesgos al implementar nuevas tecnologías. Además, dentro del campo de la manipulación móvil industrial, el centro de atención ha sido la optimización de las tecnologías individuales, especialmente los manipuladores de robots y las herramientas, mientras que la integración, el uso y la aplicación se han descuidado. Esto significa que se han informado pocas implementaciones de robots móviles, en entornos de producción, por ejemplo, y.
Componentes
Plataforma de robot móvil
Como base móvil, se pueden utilizar tanto los sistemas de transporte sin conductor clásicos como los robots móviles. El uso de un robot móvil tiene la ventaja de que puede navegar de forma libre y autónoma en la sala y, por lo tanto, el manipulador en caso de problemas (objetivo fuera de alcance, manipulación de la posición actual desde cinemática no posible, cambio en la posición de las partes). para ser mecanizado, etc.) puede soportar directamente en lugar de transportarlo solo a una posición fija. La maniobrabilidad de la plataforma es muy importante. En contraste con FTS, un robot móvil también puede acercarse a posiciones asignadas dinámicamente en cualquier momento. Sin embargo, las cinemáticas diferenciales clásicas, especialmente en las inmediaciones de las estaciones de trabajo, alcanzan sus límites y el robot solo se puede mover mediante maniobras más o menos complicadas. El uso Por lo tanto, las unidades omnidireccionales son cada vez más populares.
Opciones de almacenamiento
Si el manipulador móvil también debe transportar objetos de manera eficiente, debe estar equipado con instalaciones de almacenamiento adecuadas. Estos, con un diseño apropiado, también pueden usarse para permitir el cambio de la manija, sin que se use un segundo brazo. (Por ejemplo, una botella de cerveza que ha sido extraída de la caja en el cierre debe estacionarse y agarrarse al cuerpo antes de que se pueda verter). Las opciones de almacenamiento más grandes hacen que el trabajo del robot sea más eficiente en principio, pero también hacen que sea más difícil navegar por el vehículo.
Brazo manipulador
Esto puede ser tanto un robot industrial como un brazo robótico especialmente desarrollado. Con una selección de brazos robóticos pequeños y ligeros ahora disponibles en el mercado, el uso de brazos de desarrollo propio ha disminuido significativamente. (Ver también: brazo manipulador flexible)
Pinza
El efector final debe seleccionarse para adaptarse al elemento a manipular. Las pinzas antropomorfas con múltiples dedos móviles están cada vez más disponibles y se utilizan principalmente en investigación.
Procesamiento de imágenes
Cuando el robot manipula partes en el entorno de trabajo, casi siempre se requiere un sistema de procesamiento de imágenes. Si solo se deben realizar movimientos de brazos fijos, se debe determinar y tener en cuenta al menos el desplazamiento entre la posición actual y la posición de la plataforma utilizada durante el entrenamiento. Para asumir las tareas de los trabajadores humanos, el robot también debe lidiar con partes más o menos desordenadas (también conocidas como manijas en la caja) o ubicaciones de almacenamiento variable.
Control de coordinación
Los controles individuales de robots móviles y brazos robóticos han estado en uso durante décadas y están bien desarrollados. Sin embargo, al combinar ambos sistemas, surgen un gran número de posibles errores y casos de problemas, lo que hace necesario agregar un control de coordinación adicional. Sobre todo, esto debería encontrar soluciones independientemente si la manipulación ordenada no puede llevarse a cabo, pero sería posible hacerlo desde otra postura. Es útil controlar todo el sistema como una cadena cinemática cerrada, que es extremadamente difícil de implementar en la implementación debido a la alta redundancia.
Sistema de seguridad
En principio, es posible utilizar los dispositivos de seguridad que se utilizan para los brazos de manipulación estacionarios o los vehículos autónomos normales, también para los manipuladores móviles. Sin embargo, cuando un manipulador móvil comparte el área de trabajo con personas o al menos con otros vehículos, el sistema de seguridad está sujeto a requisitos completamente nuevos y muy exigentes, ya que surgen muchas situaciones peligrosas posibles.
Ventajas y desventajas
Al combinar plataformas móviles robóticas con brazos robóticos, las ventajas y desventajas resultantes son mayores que la suma de sus partes respectivas.
Ventajas:
El alcance de las funciones y las posibles aplicaciones son a pasos agigantados.
Todo el sistema de robot se vuelve significativamente más independiente de los sistemas de soporte (estaciones de carga y descarga, equipos de manejo de materiales, equipos de transferencia, …) y puede, por lo menos en teoría, ser más barato.
Los manipuladores móviles también permiten automatizar actividades físicas más complejas que anteriormente solo podían ser realizadas por humanos y con frecuencia causan problemas de salud debido al ejercicio.
El sistema en general puede reaccionar de manera mucho más flexible ante imprecisiones y desviaciones, por ejemplo, rastreando la base del brazo cuando un objeto no está directamente accesible.
Desventaja:
Debido a los requisitos de ambos componentes, estos a menudo interfieren entre sí:
El brazo necesita una base grande y estable para trabajar de manera eficiente, pero la plataforma debe ser pequeña y liviana para navegar de manera eficiente.
Cuanto más cortos sean los tiempos de ciclo de la plataforma, más rápido tendrá que conducir y se alcanzarán las posiciones de destino menos precisas. Cuanto más inexacta sea la posición de arranque del brazo, más se debe a las correcciones requeridas en sus tiempos de ciclo.
Para aumentar la vida útil de una plataforma alimentada por batería, se debe minimizar el peso total y el consumo de energía. Sin embargo, un brazo robótico funciona con mayor eficiencia, cuantas más funciones (y, por lo tanto, generalmente también componentes adicionales) combina.
El hecho de que el entorno de trabajo del brazo cambia constantemente, muchas de las estructuras auxiliares utilizadas anteriormente (suministro de piezas con respecto a la posición final definida del brazo, posiciones de transferencia inalterables para componentes, iluminación definida, etc.) ya no son o solo son muy difíciles utilizar.
Además, muchos manipuladores móviles no son lo suficientemente flexibles para ser utilizados en tareas que cambian rápidamente. Esta es una de las mayores inhibiciones para el uso generalizado incluso en pequeñas y medianas empresas.
Al interactuar con las personas, surgen situaciones peligrosas completamente nuevas, que imponen mayores exigencias a la tecnología de seguridad y limitan gravemente la proporción de soluciones ejecutables en comparación con las soluciones técnicamente viables.
Actualmente no hay estándares, pautas o propuestas de diseño totalmente compatibles para este tipo de robot, lo que dificulta la predicción de las posibles consecuencias legales de lesiones o daños.
Con el aumento en el número de opciones, también están conectadas las demandas desproporcionadamente mayores en el control del sistema general, especialmente en lo que respecta al manejo autónomo de errores. Esto también aumenta el riesgo de inactividad de la máquina.
Areas de aplicación
Los campos potenciales de aplicación de los manipuladores móviles son diversos y actualmente no son totalmente previsibles. Algunas aplicaciones conocidas son:
Servicios de entrega a domicilio
Liderados por la aplicación generalizada de la cerveza obtenida, se utilizan principalmente en proyectos de investigación en el campo de la robótica de servicios, preferiblemente en tareas de demostración, que también ocurren en hogares privados y, por lo tanto, son efectivas en los medios de comunicación. El desafío científico en estas tareas suele ser considerablemente mayor que los beneficios económicos esperados.
Cuidado
A medida que aumenta la proporción de personas mayores y dependientes, también aumentará la necesidad de enfermeras. Se espera que para 2050 la proporción de personas que necesitan atención se triplique en relación con el número de personas empleadas. Por lo tanto, en varios proyectos de investigación, especialmente en Japón, trabajé duro para cuidar a los robots.
Cosecha
Actualmente se están llevando a cabo proyectos de desarrollo para utilizar manipuladores móviles en la selección de componentes pesados o difíciles de manejar. Hay errores, que pueden causar altos costos de seguimiento, se evitan. Además, los trabajadores humanos se liberan de tareas insalubres a largo plazo, que se hacen más relevantes a medida que aumenta la edad promedio de la fuerza laboral.
Línea de tiempo
| Año | Nombre del robot | Empresa / Instituto de Investigación |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS, Francia |
| 2000 | Jaume | Laboratorio de Inteligencia Robótica, Universidad Jaume I, España. |
| 2004 | FAuStO | Universidad de Verona, Italia |
| 2006 | Neobotix MM-500 | Neobotix GmbH, Alemania |
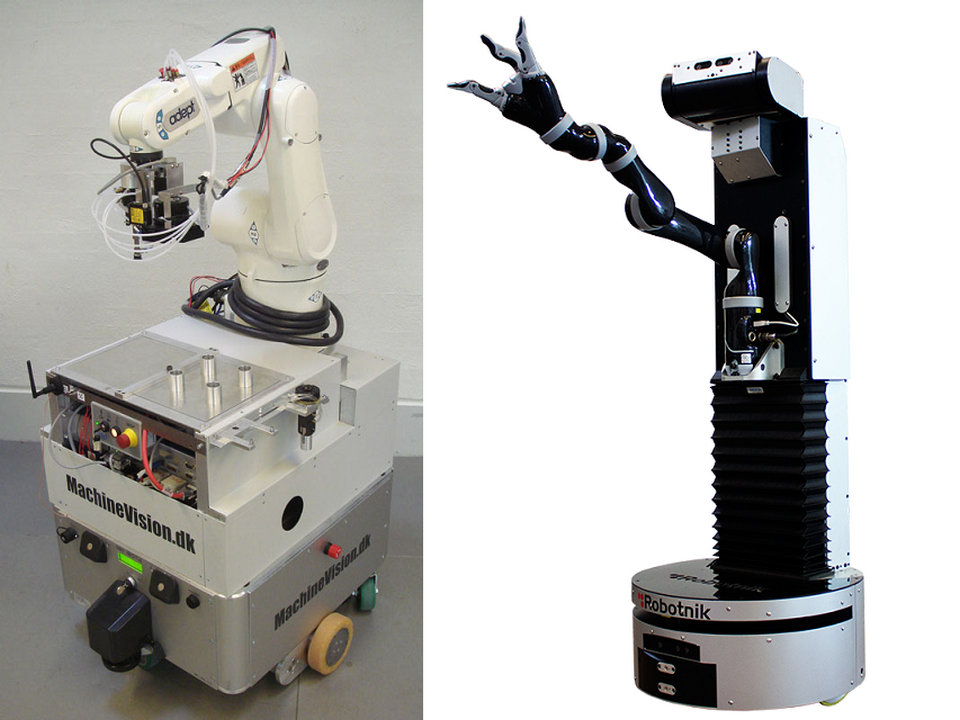
| 2009 | Pequeño ayudante | Departamento de Producción, Universidad de Aalborg, Dinamarca |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies, España y Estados Unidos |
| 2013 | UBR-1 | Robótica sin límites, Estados Unidos |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies, España y Estados Unidos |
| 2015 | CARLOS | AIMEN, España |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics, España y Canadá |
Lo último
Un ejemplo reciente es el manipulador móvil «Little Helper» del Departamento de Producción de la Universidad de Aalborg.