La cinemática es la rama de la física que describe el movimiento de objetos sólidos sin considerar las causas que se originan (las fuerzas) y se limita principalmente al estudio de la historia en función del tiempo. Para esto, utiliza velocidades y aceleraciones, que describen cómo cambia la posición en función del tiempo. La velocidad se determina como el cociente entre el desplazamiento y el tiempo utilizado, mientras que la aceleración es el cociente entre el cambio de velocidad y el tiempo utilizado.
Elementos básicos de la cinemática.
Los elementos básicos de la cinemática son el espacio, el tiempo y un móvil.
En la mecánica clásica, se admite la existencia de un espacio absoluto, es decir, un espacio anterior a todos los objetos materiales e independiente de la existencia de estos. Este espacio es la etapa donde ocurren todos los fenómenos físicos, y se supone que todas las leyes de la física se cumplen rigurosamente en todas las regiones de la física. El espacio físico está representado en la mecánica clásica por medio de un espacio euclidiano.
Análogamente, la mecánica clásica admite la existencia de un tiempo absoluto que tiene lugar de la misma manera en todas las regiones del Universo y que es independiente de la existencia de objetos materiales y de la ocurrencia de fenómenos físicos.
El móvil más simple que se puede considerar es el material o el punto de partícula; cuando en la cinemática se estudia este caso móvil particular, se denomina cinemática de partículas, y cuando el móvil en estudio es un cuerpo rígido, puede considerarse un sistema de partículas y conceptos análogos extensos; En este caso se llama cinemática del sólido rígido o del cuerpo rígido.
Fundación de la cinemática clásica.
La cinemática se ocupa del estudio del movimiento de los cuerpos en general y, en particular, del caso simplificado del movimiento de un punto material, pero no estudia por qué los cuerpos se mueven, sino que simplemente describe sus trayectorias y cómo reorientarse en su avance. Para muchos sistemas de partículas, por ejemplo los fluidos, las leyes del movimiento se estudian en la mecánica de fluidos.
El movimiento trazado por una partícula es medido por un observador con respecto a un sistema de referencia. Desde el punto de vista matemático, la cinemática expresa cómo varían las coordenadas de posición de la partícula (s) en función del tiempo. La función matemática que describe la trayectoria recorrida por el cuerpo (o partícula) depende de la velocidad (la velocidad con la que un móvil cambia de posición) y la aceleración (variación de la velocidad con respecto al tiempo).
El movimiento de una partícula (o cuerpo rígido) se puede describir de acuerdo con los valores de velocidad y aceleración, que son magnitudes vectoriales:
Si la aceleración es cero, da lugar a un movimiento rectilíneo uniforme y la velocidad permanece constante a lo largo del tiempo.
Si la aceleración es constante con la misma dirección que la velocidad, da lugar al movimiento rectilíneo uniformemente acelerado y la velocidad variará con el tiempo.
Si la aceleración es constante con dirección perpendicular a la velocidad, da lugar al movimiento circular uniforme, donde el módulo de la velocidad es constante, cambiando su dirección con el tiempo.
Cuando la aceleración es constante y está en el mismo plano que la velocidad y la trayectoria, tiene lugar un movimiento parabólico, donde el componente de la velocidad en la dirección de la aceleración se comporta como un movimiento rectilíneo uniformemente acelerado, y el componente perpendicular se comporta como un movimiento uniforme. Movimiento rectilíneo, y se genera una trayectoria parabólica al componer ambos.
Cuando la aceleración es constante pero no en el mismo plano que la velocidad y la trayectoria, se observa el efecto Coriolis.
En el movimiento armónico simple hay un movimiento oscilante periódico, como el del péndulo, en el que un cuerpo oscila de un lado al otro desde la posición de equilibrio en una dirección determinada y en intervalos de tiempo iguales. La aceleración y la velocidad son funciones, en este caso, sinusoidales del tiempo.
Al considerar el movimiento de traslación de un cuerpo extenso, en el caso de ser un cuerpo rígido, sabiendo cómo se mueve una de las partículas, se deduce cómo se mueven las otras. Más concretamente:
En un movimiento plano bidimensional, si se conoce el movimiento de 2 puntos del sólido, se determina el movimiento de todo el sólido.
En un movimiento tridimensional general, el movimiento se determina si se conoce el movimiento de 4 puntos del sólido.
Por lo tanto, considerando un punto del cuerpo, por ejemplo el centro de masa del cuerpo o cualquier otro, el movimiento de todo el cuerpo se puede expresar como:

dónde:



En la descripción del movimiento de rotación dado por
Un movimiento interesante es el de una peonza giratoria, que al girar puede tener un movimiento de precesión y nutación. Cuando un cuerpo tiene varios movimientos simultáneamente, como uno de traslación y otro de rotación, puede estudiar cada uno por separado en el sistema de referencia que sea apropiado para cada uno, y luego superponer los movimientos.
Sistemas coordinados
En el estudio del movimiento, los sistemas de coordenadas más útiles son ver los límites del camino a recorrer o analizar el efecto geométrico de la aceleración que afecta al movimiento. Por lo tanto, para describir el movimiento de un talón forzado a moverse a lo largo de un anillo circular, la coordenada más útil sería el ángulo trazado en el anillo. De la misma manera, para describir el movimiento de una partícula sometida a la acción de una fuerza central, las coordenadas polares serían las más útiles.
En la gran mayoría de los casos, el estudio cinemático se realiza en un sistema de coordenadas cartesianas, utilizando una, dos o tres dimensiones, según la trayectoria seguida por el cuerpo.
Registro de movimiento
La tecnología actual nos ofrece muchas formas de registrar el movimiento efectuado por un cuerpo.Por lo tanto, para medir la velocidad de los vehículos, está disponible el radar de tráfico cuya operación se basa en el efecto Doppler. El tacómetro es un indicador de la velocidad de un vehículo en función de la frecuencia de rotación de las ruedas. Los caminantes tienen podómetros que detectan las vibraciones características del paso y, asumiendo una distancia promedio característica para cada paso, permiten calcular la distancia recorrida. El video, junto con el análisis computarizado de las imágenes, también permite determinar la posición y la velocidad de los vehículos.
Tipos de movimientos
Movimiento rectilíneo
Es aquella en la que el móvil describe una trayectoria en línea recta.
Movimiento rectilíneo uniforme
En este movimiento, el móvil se mueve a lo largo de una línea recta a una velocidad constante de V;La aceleración a es cero todo el tiempo. Esto corresponde al movimiento de un objeto lanzado al espacio fuera de cualquier interacción, o al movimiento de un objeto que se desliza sin fricción.Dado que la velocidad V es constante, la posición variará linealmente con respecto al tiempo, de acuerdo con la ecuación:






dónde 




Movimiento rectilíneo uniformemente acelerado o variado.
En este movimiento, la aceleración es constante, por lo que la velocidad móvil varía linealmente y la posición cuadráticamente con el tiempo. Las ecuaciones que rigen este movimiento son las siguientes:







La velocidad final es igual a la velocidad inicial del móvil más la aceleración debido al aumento en el tiempo. 

La velocidad final es igual a la velocidad inicial más la aceleración por tiempo.
Partiendo de la relación que calcula la velocidad:






Dónde 



Tenga en cuenta que si la aceleración fuera cero, las ecuaciones anteriores corresponderían a las de un movimiento rectilíneo uniforme, es decir, con velocidad 

Dos casos específicos de MRUA son caída libre y tiro vertical. La caída libre es el movimiento de un objeto que cae hacia el centro de la Tierra con una aceleración equivalente a la aceleración de la gravedad (que en el caso del planeta Tierra al nivel del mar es de aproximadamente 9.8 m / s 2). El disparo vertical, por otro lado, corresponde al de un objeto lanzado en dirección opuesta al centro de la tierra, ganando altura. En este caso, la aceleración de la gravedad hace que el objeto pierda velocidad, en lugar de ganarla, hasta alcanzar el estado de reposo; luego, y desde allí, comienza un movimiento de caída libre con velocidad inicial cero.
Movimiento armónico simple
Es un movimiento periódico de ida y vuelta, en el que un cuerpo oscila a cada lado de una posición de equilibrio en una dirección determinada y en intervalos de tiempo iguales. Matemáticamente, el camino recorrido se expresa como una función del tiempo utilizando funciones trigonométricas, que son periódicas. Por ejemplo, la ecuación de posición con respecto al tiempo, para el caso de movimiento en una dimensión es:
o


que corresponde a una función sinusoidal de frecuencia 

Los movimientos del péndulo, de una masa unida a un resorte o la vibración de los átomos en las redes cristalinas son de estas características.
La aceleración experimentada por el cuerpo es proporcional al desplazamiento del objeto y en la dirección opuesta, desde el punto de equilibrio. Matemáticamente:

dónde 

La solución a esa ecuación diferencial conduce a funciones trigonométricas de la forma anterior.Lógicamente, un movimiento periódico oscilatorio real se ralentiza en el tiempo (principalmente la fricción), por lo que la expresión de la aceleración es más complicada, y es necesario agregar nuevos términos relacionados con la fricción. Una buena aproximación a la realidad es el estudio del movimiento oscilatorio amortiguado.
Movimiento parabolico
El movimiento parabólico se puede analizar como la composición de dos movimientos rectilíneos diferentes: uno horizontal (según el eje x) de velocidad constante y otro vertical (según el eje y) uniformemente acelerado, con la aceleración gravitacional; La composición de ambos resulta en una trayectoria parabólica.
Claramente, la componente horizontal de la velocidad permanece sin cambios, pero la componente vertical y el ángulo θ cambian en el curso del movimiento.
El vector de velocidad inicial. 



El desplazamiento horizontal viene dado por la ley del movimiento uniforme, por lo tanto sus ecuaciones serán (si se considera




Siempre y cuando el movimiento de acuerdo con el eje. 



Si reemplazas y operas para eliminar el tiempo, con las ecuaciones que dan las posiciones. 

que tiene la forma general

y representa una parábola en el plano y (x). Se muestra esta representación, pero en ella se ha considerado. 


Movimiento circular
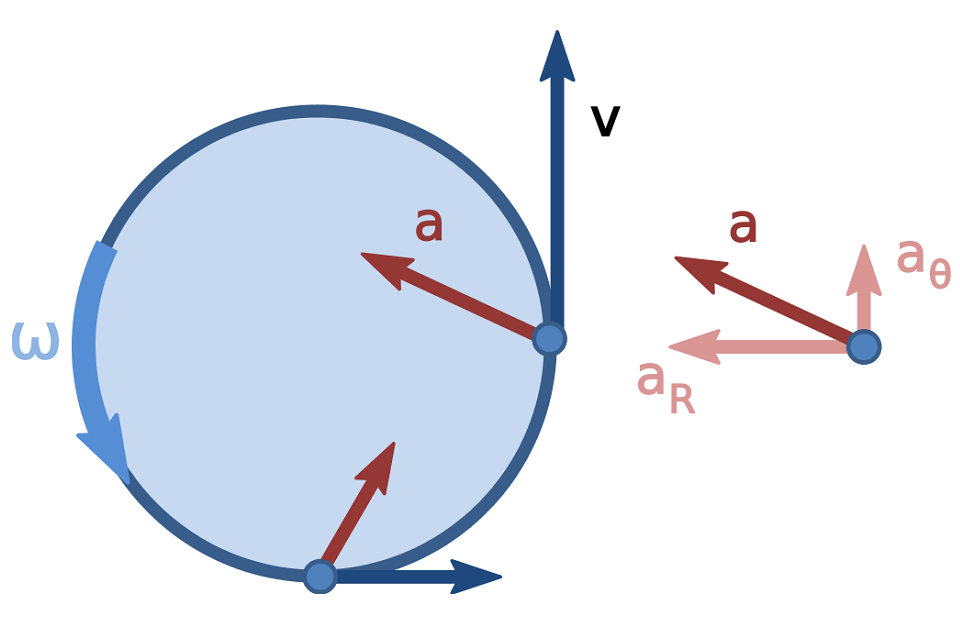
El movimiento circular en la práctica es un tipo de movimiento muy común: lo experimentan, por ejemplo, las partículas de un disco que gira sobre su eje, las de una noria, las de las manos de un reloj, las de las paletas de un ventilador, etc. En el caso de un disco que gira alrededor de un eje fijo, cualquiera de sus puntos describe trayectorias circulares, realizando un cierto número de giros durante un cierto intervalo de tiempo. Para la descripción de este movimiento es conveniente referirse a anglestours; ya que estos últimos son idénticos para todos los puntos del disco (referidos al mismo centro). La longitud del arco recorrido por un punto del disco depende de su posición y es igual al producto del ángulo recorrido por su distancia al eje o centro de rotación. La velocidad angular (ω) se define como el desplazamiento angular con respecto al tiempo, y se representa mediante un vector perpendicular al plano de rotación; su dirección se determina aplicando la «regla de la mano derecha» o el sacacorchos. La aceleración angular (α) resulta ser una variación de la velocidad angular con respecto al tiempo, y está representada por un vector análogo al de la velocidad angular, pero puede tener o no la misma dirección (dependiendo de si acelera o no). o retrasos).
La velocidad (v) de una partícula es una magnitud vectorial cuyo módulo expresa la longitud del arco viajado (espacio) por unidad de tiempo; Dicho módulo también se llama velocidad o celeridad. Está representado por un vector cuya dirección es tangente a la trayectoria circular y coincide con la del movimiento.
La aceleración (a) de una partícula es una magnitud vectorial que indica la velocidad con la que la velocidad cambia con respecto al tiempo; es decir, el cambio del vector de velocidad por unidad de tiempo. La aceleración generalmente tiene dos componentes: aceleración tangencial a la trayectoria y aceleración normal a la misma. La aceleración tangencial es lo que causa la variación del módulo de velocidad (celeridad) con respecto al tiempo, mientras que la aceleración normal es responsable del cambio en la dirección de la velocidad. Los módulos de ambos componentes de aceleración dependen de la distancia que la partícula esté del eje de rotación.
Movimiento circular uniforme
Se caracteriza por tener una velocidad variable o una constante estructural, de modo que la aceleración angular es cero. La velocidad lineal de la partícula no varía en el módulo, sino en la dirección. La aceleración tangencial es cero; pero hay aceleración centrípeta (aceleración normal), que es la causa del cambio de dirección.
Matemáticamente, la velocidad angular se expresa como:

dónde 



Movimiento circular uniformemente acelerado
En este movimiento, la velocidad angular varía linealmente con respecto al tiempo, ya que el móvil está sujeto a una aceleración angular constante. Las ecuaciones de movimiento son análogas a las de las rectilíneas uniformemente aceleradas, pero utilizando ángulos en lugar de distancias:



siendo 
Movimiento armónico complejo.
Es un tipo de movimiento bidimensional o tridimensional que se puede construir como una combinación de movimientos armónicos simples en diferentes direcciones. Cuando una estructura está sujeta a vibraciones, el movimiento de un punto material particular a menudo puede ser modelado por un movimiento armónico complejo si la amplitud del movimiento es pequeña.
El complejo movimiento armónico es interesante porque generalmente no es un movimiento periódico sino un movimiento cuasiperiódico que nunca se repite exactamente, aunque se ejecuta casi ciclos sin repetirse exactamente. La forma vectorial de un punto que ejecuta este movimiento resulta ser:

dónde 


El movimiento circular uniforme es de hecho un caso de movimiento armónico complejo en el que las amplitudes en dos direcciones son iguales al radio del círculo. 


Movimiento sólido rígido
Todos los movimientos descritos anteriormente se refieren a puntos de material concreto, o corpúsculos, es decir, cuerpos físicos cuyas pequeñas dimensiones con respecto al tamaño de la trayectoria para que puedan ser aproximados por puntos de material. Sin embargo, los cuerpos físicos macroscópicos no son puntuales, en muchas situaciones el movimiento del cuerpo en su conjunto requiere una descripción más compleja que asumir que todos sus puntos siguen una trayectoria mucho mayor que las distancias entre los puntos del cuerpo, de modo que la descripción de el cuerpo como punto material es inadecuado y la cinemática del punto material es demasiado simple para describir adecuadamente la cinemática del cuerpo. En esos casos, se debe utilizar la cinemática del sólido rígido, en el que la «trayectoria» del cuerpo recibe un espacio más complejo o más rico que el simple espacio euclidiano tridimensional, ya que es necesario definir no solo el desplazamiento de El cuerpo atraviesa dicho espacio, pero para especificar los cambios de orientación del cuerpo en su movimiento, mediante movimientos de rotación.
Formulación matemática con cálculo diferencial.
La velocidad es la derivada temporal del vector de posición y la aceleración es la derivada temporal de la velocidad:

o sus expresiones integrales:

dónde 
Movimiento en la tierra
Al observar el movimiento en la Tierra de cuerpos como masas de aire en meteorología o proyectiles, existen desviaciones causadas por el llamado Efecto Coriolis. Se utilizan para probar que la Tierra está girando sobre su eje. Desde el punto de vista cinemático, es interesante explicar qué sucede cuando se considera la trayectoria observada desde un sistema de referencia que está en rotación, la Tierra.
Supongamos que un cañón en el ecuador lanza un proyectil hacia el norte a lo largo de un meridiano. Un observador ubicado al norte en el meridiano observa que el proyectil cae al este de la cosa predicha, desviándose a la derecha de la trayectoria. De manera similar, si el proyectil hubiera disparado a lo largo del meridiano hacia el sur, el proyectil también se habría desviado hacia el este, en este caso a la izquierda de la trayectoria seguida. La explicación de esta «desviación», causada por el efecto Coriolis, se debe a la rotación de la Tierra. El proyectil tiene una velocidad con tres componentes: los dos que afectan el tiro parabólico, hacia el norte (o sur) y hacia arriba, respectivamente, más un tercer componente perpendicular a los anteriores debido al proyectil, antes de abandonar el cañón, tiene Una velocidad igual a la velocidad de rotación de la Tierra en el ecuador. Este último componente de la velocidad es la causa de la desviación observada porque aunque la velocidad angular de rotación de la Tierra es constante en toda su superficie, no es la velocidad de rotación lineal, que es máxima en el ecuador y nula en el centro de los polos. Así, el proyectil avanza hacia el norte (o hacia el sur), se mueve más rápido hacia el este que la superficie de la Tierra, por lo que se observa la desviación mencionada.
Otro caso interesante de movimiento en la Tierra es el del péndulo de Foucault. El plano de oscilación del péndulo no permanece fijo, pero lo observamos girando en el sentido de las agujas del reloj en el hemisferio norte y en el sentido contrario a las agujas del reloj en el hemisferio sur. Si el péndulo oscila en el ecuador, el plano de oscilación no cambia. Por otro lado, en los polos, la rotación del plano de oscilación toma un día. Para latitudes intermedias toma valores más altos, dependiendo de la latitud. La explicación para tal giro se basa en los mismos principios que se hicieron anteriormente para el proyectil de artillería.
Cinemática relativista
En relatividad, lo que es absoluto es la velocidad de la luz en un vacío, no el espacio o el tiempo.Cada observador en un sistema de referencia inercial, sin importar su velocidad relativa, medirá la misma velocidad para la luz que otro observador en otro sistema. Esto no es posible desde el punto de vista clásico. Las transformaciones de movimiento entre dos sistemas de referencia deben tener en cuenta este hecho, del cual surgieron las transformaciones de Lorentz. Muestran que las dimensiones espaciales y el tiempo están relacionados, por lo que en la relatividad es normal hablar de espacio-tiempo y un espacio de cuatro dimensiones.
Hay mucha evidencia experimental de efectos relativistas. Por ejemplo, el tiempo medido en un laboratorio para la desintegración de una partícula que se ha generado con una velocidad cercana a la de la luz es mayor que la descomposición medida cuando la partícula se genera en reposo con respecto al laboratorio. Esto se explica por la dilatación temporal relativista que ocurre en el primer caso.
La cinemática es un caso especial de geometría diferencial de curvas, en la que todas las curvas se parametrizan de la misma manera: a lo largo del tiempo. Para el caso relativista, el tiempo de coordenadas es una medida relativa para cada observador, por lo tanto, se requiere el uso de algún tipo de medida invariante como el intervalo relativista o de manera equivalente para partículas con masa en el tiempo propio. La relación entre el tiempo coordinado de un observador y el tiempo apropiado viene dada por el factor de Lorentz.