Electric motor

An electric motor is an electrical machine that converts electrical energy into mechanical energy. Most electric motors operate through the interaction between the motor’s magnetic field and winding currents to generate force in the form of rotation. Electric motors can be powered by direct current (DC) sources, such as from batteries, motor vehicles or rectifiers, or by alternating current (AC) sources, such as a power grid, inverters or electrical generators. An electric generator is mechanically identical to an electric motor, but operates in the reverse direction, accepting mechanical energy (such as from flowing water) and converting this mechanical energy into electrical energy.
Electric motors may be classified by considerations such as power source type, internal construction, application and type of motion output. In addition to AC versus DC types, motors may be brushed or brushless, may be of various phase (see single-phase, two-phase, or three-phase), and may be either air-cooled or liquid-cooled. General-purpose motors with standard dimensions and characteristics provide convenient mechanical power for industrial use. The largest electric motors are used for ship propulsion, pipeline compression and pumped-storage applications with ratings reaching 100 megawatts. Electric motors are found in industrial fans, blowers and pumps, machine tools, household appliances, power tools and disk drives. Small motors may be found in electric watches.
In certain applications, such as in regenerative braking with traction motors, electric motors can be used in reverse as generators to recover energy that might otherwise be lost as heat and friction.
Electric motors produce linear or rotary force (torque) and can be distinguished from devices such as magnetic solenoids and loudspeakers that convert electricity into motion but do not generate usable mechanical force, which are respectively referred to as actuators and transducers.
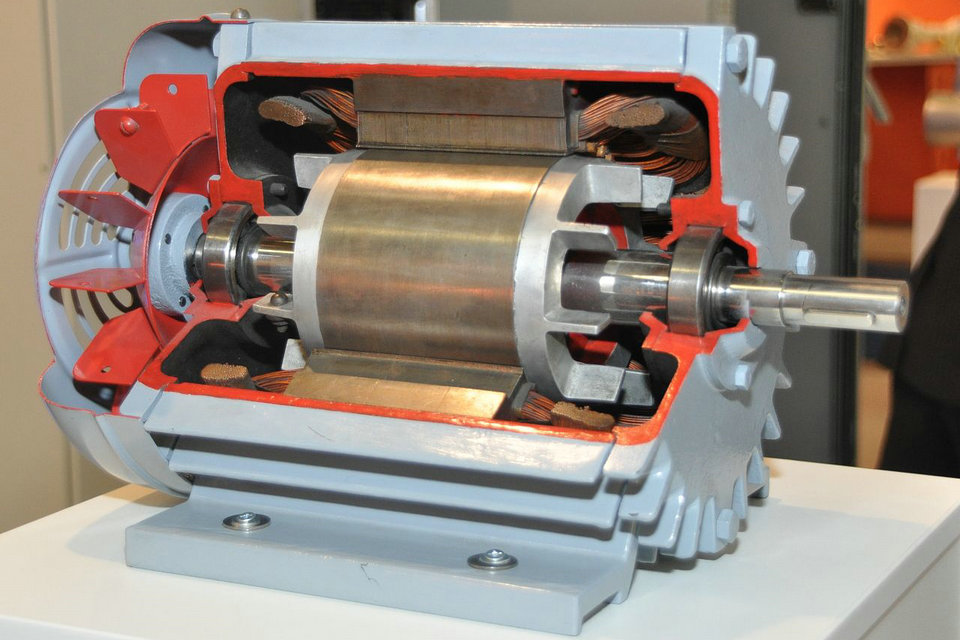
Components
Rotor
In an electric motor, the moving part is the rotor, which turns the shaft to deliver the mechanical power. The rotor usually has conductors laid into it that carry currents, which interact with the magnetic field of the stator to generate the forces that turn the shaft. Alternatively, some rotors carry permanent magnets, and the stator holds the conductors.
Bearings
The rotor is supported by bearings, which allow the rotor to turn on its axis. The bearings are in turn supported by the motor housing. The motor shaft extends through the bearings to the outside of the motor, where the load is applied. Because the forces of the load are exerted beyond the outermost bearing, the load is said to be overhung.
Stator
The stator is the stationary part of the motor’s electromagnetic circuit and usually consists of either windings or permanent magnets. The stator core is made up of many thin metal sheets, called laminations. Laminations are used to reduce energy losses that would result if a solid core were used.
Air gap
The distance between the rotor and stator is called the air gap. The air gap has important effects, and is generally as small as possible, as a large gap has a strong negative effect on performance. It is the main source of the low power factor at which motors operate. The magnetizing current increases with the air gap. For this reason, the air gap should be minimal. Very small gaps may pose mechanical problems in addition to noise and losses.
Windings
Windings are wires that are laid in coils, usually wrapped around a laminated soft iron magnetic core so as to form magnetic poles when energized with current.
Electric machines come in two basic magnet field pole configurations: salient- and nonsalient-pole configurations. In the salient-pole machine the pole’s magnetic field is produced by a winding wound around the pole below the pole face. In the nonsalient-pole, or distributed field, or round-rotor, machine, the winding is distributed in pole face slots. A shaded-pole motor has a winding around part of the pole that delays the phase of the magnetic field for that pole.
Some motors have conductors that consist of thicker metal, such as bars or sheets of metal, usually copper, alternatively aluminum. These are usually powered by electromagnetic induction.
Commutator
A commutator is a mechanism used to switch the input of most DC machines and certain AC machines. It consists of slip-ring segments insulated from each other and from the shaft. The motor’s armature current is supplied through stationary brushes in contact with the revolving commutator, which causes required current reversal, and applies power to the machine in an optimal manner as the rotor rotates from pole to pole. In absence of such current reversal, the motor would brake to a stop. In light of improved technologies in the electronic-controller, sensorless-control, induction-motor, and permanent-magnet-motor fields, externally-commutated induction and permanent-magnet motors are displacing electromechanically-commutated motors.
Motor supply and control
Motor supply
A DC motor is usually supplied through slip ring commutator as described above. AC motors’ commutation can be either slip ring commutator or externally commutated type, can be fixed-speed or variable-speed control type, and can be synchronous or asynchronous type. Universal motors can run on either AC or DC.
Motor control
Fixed-speed controlled AC motors are provided with direct-on-line or soft-start starters.
Variable-speed controlled AC motors are provided with a range of different power inverter, variable-frequency drive or electronic commutator technologies.
The term electronic commutator is usually associated with self-commutated brushless DC motor and switched reluctance motor applications.
Major categories
Electric motors operate on three different physical principles: magnetism, electrostatics and piezoelectricity. By far, the most common is magnetism.
In magnetic motors, magnetic fields are formed in both the rotor and the stator. The product between these two fields gives rise to a force, and thus a torque on the motor shaft. One, or both, of these fields must be made to change with the rotation of the motor. This is done by switching the poles on and off at the right time, or varying the strength of the pole.
The main types are DC motors and AC motors, the former increasingly being displaced by the latter.
AC electric motors are either asynchronous or synchronous.
Once started, a synchronous motor requires synchronism with the moving magnetic field’s synchronous speed for all normal torque conditions.
In synchronous machines, the magnetic field must be provided by means other than induction such as from separately excited windings or permanent magnets.
A fractional-horsepower (FHP) motor either has a rating below about 1 horsepower (0.746 kW), or is manufactured with a standard-frame size smaller than a standard 1 HP motor. Many household and industrial motors are in the fractional-horsepower class.
Abbreviations:
BLAC – Brushless AC
BLDC – Brushless DC
BLDM – Brushless DC motor
EC – Electronic commutator
PM – Permanent magnet
IPMSM – Interior permanent-magnet synchronous motor
PMSM – Permanent magnet synchronous motor
SPMSM – Surface permanent magnet synchronous motor
SCIM – Squirrel-cage induction motor
SRM – Switched reluctance motor
SyRM – Synchronous reluctance motor
VFD – Variable-frequency drive
WRIM – Wound-rotor induction motor
WRSM – Wound-rotor synchronous motor
LRA – Locked-Rotor Amps: The current you can expect under starting conditions when you apply full voltage. It occurs instantly during start-up.
RLA – Rated-Load Amps: The maximum current a motor should draw under any operating conditions. Often mistakenly called running-load amps, which leads people to believe, incorrectly, that the motor should always pull these amps.
FLA – Full-Load Amps: Changed in 1976 to “RLA – Rated-Load Amps”.
Self-commutated motor
Brushed DC motor
By definition, all self-commutated DC motors run on DC electric power. Most DC motors are small permanent magnet (PM) types. They contain a brushed internal mechanical commutation to reverse motor windings’ current in synchronism with rotation.
Electrically excited DC motor
A commutated DC motor has a set of rotating windings wound on an armature mounted on a rotating shaft. The shaft also carries the commutator, a long-lasting rotary electrical switch that periodically reverses the flow of current in the rotor windings as the shaft rotates. Thus, every brushed DC motor has AC flowing through its rotating windings. Current flows through one or more pairs of brushes that bear on the commutator; the brushes connect an external source of electric power to the rotating armature.
The rotating armature consists of one or more coils of wire wound around a laminated, magnetically “soft” ferromagnetic core. Current from the brushes flows through the commutator and one winding of the armature, making it a temporary magnet (an electromagnet). The magnetic field produced by the armature interacts with a stationary magnetic field produced by either PMs or another winding (a field coil), as part of the motor frame. The force between the two magnetic fields tends to rotate the motor shaft. The commutator switches power to the coils as the rotor turns, keeping the magnetic poles of the rotor from ever fully aligning with the magnetic poles of the stator field, so that the rotor never stops (like a compass needle does), but rather keeps rotating as long as power is applied.
Many of the limitations of the classic commutator DC motor are due to the need for brushes to press against the commutator. This creates friction. Sparks are created by the brushes making and breaking circuits through the rotor coils as the brushes cross the insulating gaps between commutator sections. Depending on the commutator design, this may include the brushes shorting together adjacent sections – and hence coil ends – momentarily while crossing the gaps. Furthermore, the inductance of the rotor coils causes the voltage across each to rise when its circuit is opened, increasing the sparking of the brushes. This sparking limits the maximum speed of the machine, as too-rapid sparking will overheat, erode, or even melt the commutator. The current density per unit area of the brushes, in combination with their resistivity, limits the output of the motor. The making and breaking of electric contact also generates electrical noise; sparking generates RFI. Brushes eventually wear out and require replacement, and the commutator itself is subject to wear and maintenance (on larger motors) or replacement (on small motors). The commutator assembly on a large motor is a costly element, requiring precision assembly of many parts. On small motors, the commutator is usually permanently integrated into the rotor, so replacing it usually requires replacing the whole rotor.
While most commutators are cylindrical, some are flat discs consisting of several segments (typically, at least three) mounted on an insulator.
Large brushes are desired for a larger brush contact area to maximize motor output, but small brushes are desired for low mass to maximize the speed at which the motor can run without the brushes excessively bouncing and sparking. (Small brushes are also desirable for lower cost.) Stiffer brush springs can also be used to make brushes of a given mass work at a higher speed, but at the cost of greater friction losses (lower efficiency) and accelerated brush and commutator wear. Therefore, DC motor brush design entails a trade-off between output power, speed, and efficiency/wear.
DC machines are defined as follows:
Armature circuit – A winding where the load current is carried, such that can be either stationary or rotating part of motor or generator.
Field circuit – A set of windings that produces a magnetic field so that the electromagnetic induction can take place in electric machines.
Commutation: A mechanical technique in which rectification can be achieved, or from which DC can be derived, in DC machines.
There are five types of brushed DC motor:-
DC shunt-wound motor
DC series-wound motor
DC compound motor (two configurations):
Cumulative compound
Differentially compounded
PM DC motor (not shown)
Separately excited (not shown).
Permanent magnet DC motor
A PM (permanent magnet) motor does not have a field winding on the stator frame, instead relying on PMs to provide the magnetic field against which the rotor field interacts to produce torque. Compensating windings in series with the armature may be used on large motors to improve commutation under load. Because this field is fixed, it cannot be adjusted for speed control. PM fields (stators) are convenient in miniature motors to eliminate the power consumption of the field winding. Most larger DC motors are of the “dynamo” type, which have stator windings. Historically, PMs could not be made to retain high flux if they were disassembled; field windings were more practical to obtain the needed amount of flux. However, large PMs are costly, as well as dangerous and difficult to assemble; this favors wound fields for large machines.
To minimize overall weight and size, miniature PM motors may use high energy magnets made with neodymium or other strategic elements; most such are neodymium-iron-boron alloy. With their higher flux density, electric machines with high-energy PMs are at least competitive with all optimally designed singly-fed synchronous and induction electric machines. Miniature motors resemble the structure in the illustration, except that they have at least three rotor poles (to ensure starting, regardless of rotor position) and their outer housing is a steel tube that magnetically links the exteriors of the curved field magnets.
Electronic commutator (EC) motor
Brushless DC motor
Some of the problems of the brushed DC motor are eliminated in the BLDC design. In this motor, the mechanical “rotating switch” or commutator is replaced by an external electronic switch synchronised to the rotor’s position. BLDC motors are typically 85–90% efficient or more. Efficiency for a BLDC motor of up to 96.5% have been reported, whereas DC motors with brushgear are typically 75–80% efficient.
The BLDC motor’s characteristic trapezoidal counter-electromotive force (CEMF) waveform is derived partly from the stator windings being evenly distributed, and partly from the placement of the rotor’s permanent magnets. Also known as electronically commutated DC or inside out DC motors, the stator windings of trapezoidal BLDC motors can be with single-phase, two-phase or three-phase and use Hall effect sensors mounted on their windings for rotor position sensing and low cost closed-loop control of the electronic commutator.
BLDC motors are commonly used where precise speed control is necessary, as in computer disk drives or in video cassette recorders, the spindles within CD, CD-ROM (etc.) drives, and mechanisms within office products, such as fans, laser printers and photocopiers. They have several advantages over conventional motors:
Compared to AC fans using shaded-pole motors, they are very efficient, running much cooler than the equivalent AC motors. This cool operation leads to much-improved life of the fan’s bearings.
Without a commutator to wear out, the life of a BLDC motor can be significantly longer compared to a DC motor using brushes and a commutator. Commutation also tends to cause a great deal of electrical and RF noise; without a commutator or brushes, a BLDC motor may be used in electrically sensitive devices like audio equipment or computers.
The same Hall effect sensors that provide the commutation can also provide a convenient tachometer signal for closed-loop control (servo-controlled) applications. In fans, the tachometer signal can be used to derive a “fan OK” signal as well as provide running speed feedback.
The motor can be easily synchronized to an internal or external clock, leading to precise speed control.
BLDC motors have no chance of sparking, unlike brushed motors, making them better suited to environments with volatile chemicals and fuels. Also, sparking generates ozone, which can accumulate in poorly ventilated buildings risking harm to occupants’ health.
BLDC motors are usually used in small equipment such as computers and are generally used in fans to get rid of unwanted heat.
They are also acoustically very quiet motors, which is an advantage if being used in equipment that is affected by vibrations.
Modern BLDC motors range in power from a fraction of a watt to many kilowatts. Larger BLDC motors up to about 100 kW rating are used in electric vehicles. They also find significant use in high-performance electric model aircraft.
Switched reluctance motor
The SRM has no brushes or permanent magnets, and the rotor has no electric currents. Instead, torque comes from a slight misalignment of poles on the rotor with poles on the stator. The rotor aligns itself with the magnetic field of the stator, while the stator field windings are sequentially energized to rotate the stator field.
The magnetic flux created by the field windings follows the path of least magnetic reluctance, meaning the flux will flow through poles of the rotor that are closest to the energized poles of the stator, thereby magnetizing those poles of the rotor and creating torque. As the rotor turns, different windings will be energized, keeping the rotor turning.
SRMs are used in some appliances and vehicles.
Universal AC/DC motor
A commutated electrically excited series or parallel wound motor is referred to as a universal motor because it can be designed to operate on AC or DC power. A universal motor can operate well on AC because the current in both the field and the armature coils (and hence the resultant magnetic fields) will alternate (reverse polarity) in synchronism, and hence the resulting mechanical force will occur in a constant direction of rotation.
Operating at normal power line frequencies, universal motors are often found in a range less than 1000 watts. Universal motors also formed the basis of the traditional railway traction motor in electric railways. In this application, the use of AC to power a motor originally designed to run on DC would lead to efficiency losses due to eddy current heating of their magnetic components, particularly the motor field pole-pieces that, for DC, would have used solid (un-laminated) iron and they are now rarely used.
An advantage of the universal motor is that AC supplies may be used on motors that have some characteristics more common in DC motors, specifically high starting torque and very compact design if high running speeds are used. The negative aspect is the maintenance and short life problems caused by the commutator. Such motors are used in devices, such as food mixers and power tools, that are used only intermittently, and often have high starting-torque demands. Multiple taps on the field coil provide (imprecise) stepped speed control. Household blenders that advertise many speeds frequently combine a field coil with several taps and a diode that can be inserted in series with the motor (causing the motor to run on half-wave rectified AC). Universal motors also lend themselves to electronic speed control and, as such, are an ideal choice for devices like domestic washing machines. The motor can be used to agitate the drum (both forwards and in reverse) by switching the field winding with respect to the armature.
Whereas SCIMs cannot turn a shaft faster than allowed by the power line frequency, universal motors can run at much higher speeds. This makes them useful for appliances such as blenders, vacuum cleaners, and hair dryers where high speed and light weight are desirable. They are also commonly used in portable power tools, such as drills, sanders, circular and jig saws, where the motor’s characteristics work well. Many vacuum cleaner and weed trimmer motors exceed 10,000 rpm, while many similar miniature grinders exceed 30,000 rpm.
Externally commutated AC machine
The design of AC induction and synchronous motors is optimized for operation on single-phase or polyphase sinusoidal or quasi-sinusoidal waveform power such as supplied for fixed-speed application from the AC power grid or for variable-speed application from VFD controllers. An AC motor has two parts: a stationary stator having coils supplied with AC to produce a rotating magnetic field, and a rotor attached to the output shaft that is given a torque by the rotating field.
Induction motor
Cage and wound rotor induction motor
An induction motor is an asynchronous AC motor where power is transferred to the rotor by electromagnetic induction, much like transformer action. An induction motor resembles a rotating transformer, because the stator (stationary part) is essentially the primary side of the transformer and the rotor (rotating part) is the secondary side. Polyphase induction motors are widely used in industry.
Induction motors may be further divided into Squirrel Cage Induction Motors and Wound Rotor Induction Motors (WRIMs). SCIMs have a heavy winding made up of solid bars, usually aluminum or copper, joined by rings at the ends of the rotor. When one considers only the bars and rings as a whole, they are much like an animal’s rotating exercise cage, hence the name.
Currents induced into this winding provide the rotor magnetic field. The shape of the rotor bars determines the speed-torque characteristics. At low speeds, the current induced in the squirrel cage is nearly at line frequency and tends to be in the outer parts of the rotor cage. As the motor accelerates, the slip frequency becomes lower, and more current is in the interior of the winding. By shaping the bars to change the resistance of the winding portions in the interior and outer parts of the cage, effectively a variable resistance is inserted in the rotor circuit. However, the majority of such motors have uniform bars.
In a WRIM, the rotor winding is made of many turns of insulated wire and is connected to slip rings on the motor shaft. An external resistor or other control devices can be connected in the rotor circuit. Resistors allow control of the motor speed, although significant power is dissipated in the external resistance. A converter can be fed from the rotor circuit and return the slip-frequency power that would otherwise be wasted back into the power system through an inverter or separate motor-generator.
The WRIM is used primarily to start a high inertia load or a load that requires a very high starting torque across the full speed range. By correctly selecting the resistors used in the secondary resistance or slip ring starter, the motor is able to produce maximum torque at a relatively low supply current from zero speed to full speed. This type of motor also offers controllable speed.
Motor speed can be changed because the torque curve of the motor is effectively modified by the amount of resistance connected to the rotor circuit. Increasing the value of resistance will move the speed of maximum torque down. If the resistance connected to the rotor is increased beyond the point where the maximum torque occurs at zero speed, the torque will be further reduced.
When used with a load that has a torque curve that increases with speed, the motor will operate at the speed where the torque developed by the motor is equal to the load torque. Reducing the load will cause the motor to speed up, and increasing the load will cause the motor to slow down until the load and motor torque are equal. Operated in this manner, the slip losses are dissipated in the secondary resistors and can be very significant. The speed regulation and net efficiency is also very poor.
Torque motor
A torque motor is a specialized form of electric motor that can operate indefinitely while stalled, that is, with the rotor blocked from turning, without incurring damage. In this mode of operation, the motor will apply a steady torque to the load (hence the name).
A common application of a torque motor would be the supply- and take-up reel motors in a tape drive. In this application, driven from a low voltage, the characteristics of these motors allow a relatively constant light tension to be applied to the tape whether or not the capstan is feeding tape past the tape heads. Driven from a higher voltage, (and so delivering a higher torque), the torque motors can also achieve fast-forward and rewind operation without requiring any additional mechanics such as gears or clutches. In the computer gaming world, torque motors are used in force feedback steering wheels.
Another common application is the control of the throttle of an internal combustion engine in conjunction with an electronic governor. In this usage, the motor works against a return spring to move the throttle in accordance with the output of the governor. The latter monitors engine speed by counting electrical pulses from the ignition system or from a magnetic pickup and, depending on the speed, makes small adjustments to the amount of current applied to the motor. If the engine starts to slow down relative to the desired speed, the current will be increased, the motor will develop more torque, pulling against the return spring and opening the throttle. Should the engine run too fast, the governor will reduce the current being applied to the motor, causing the return spring to pull back and close the throttle.
Synchronous motor
A synchronous electric motor is an AC motor distinguished by a rotor spinning with coils passing magnets at the same rate as the AC and resulting in a magnetic field that drives it. Another way of saying this is that it has zero slip under usual operating conditions. Contrast this with an induction motor, which must slip to produce torque. One type of synchronous motor is like an induction motor except the rotor is excited by a DC field. Slip rings and brushes are used to conduct current to the rotor. The rotor poles connect to each other and move at the same speed hence the name synchronous motor. Another type, for low load torque, has flats ground onto a conventional squirrel-cage rotor to create discrete poles. Yet another, such as made by Hammond for its pre-World War II clocks, and in the older Hammond organs, has no rotor windings and discrete poles. It is not self-starting. The clock requires manual starting by a small knob on the back, while the older Hammond organs had an auxiliary starting motor connected by a spring-loaded manually operated switch.
Finally, hysteresis synchronous motors typically are (essentially) two-phase motors with a phase-shifting capacitor for one phase. They start like induction motors, but when slip rate decreases sufficiently, the rotor (a smooth cylinder) becomes temporarily magnetized. Its distributed poles make it act like a permanent magnet synchronous motor (PMSM). The rotor material, like that of a common nail, will stay magnetized, but can also be demagnetized with little difficulty. Once running, the rotor poles stay in place; they do not drift.
Low-power synchronous timing motors (such as those for traditional electric clocks) may have multi-pole permanent magnet external cup rotors, and use shading coils to provide starting torque. Telechron clock motors have shaded poles for starting torque, and a two-spoke ring rotor that performs like a discrete two-pole rotor.
Doubly-fed electric machine
Doubly fed electric motors have two independent multiphase winding sets, which contribute active (i.e., working) power to the energy conversion process, with at least one of the winding sets electronically controlled for variable speed operation. Two independent multiphase winding sets (i.e., dual armature) are the maximum provided in a single package without topology duplication. Doubly-fed electric motors are machines with an effective constant torque speed range that is twice synchronous speed for a given frequency of excitation. This is twice the constant torque speed range as singly-fed electric machines, which have only one active winding set.
A doubly-fed motor allows for a smaller electronic converter but the cost of the rotor winding and slip rings may offset the saving in the power electronics components. Difficulties with controlling speed near synchronous speed limit applications.
Source from Wikipedia