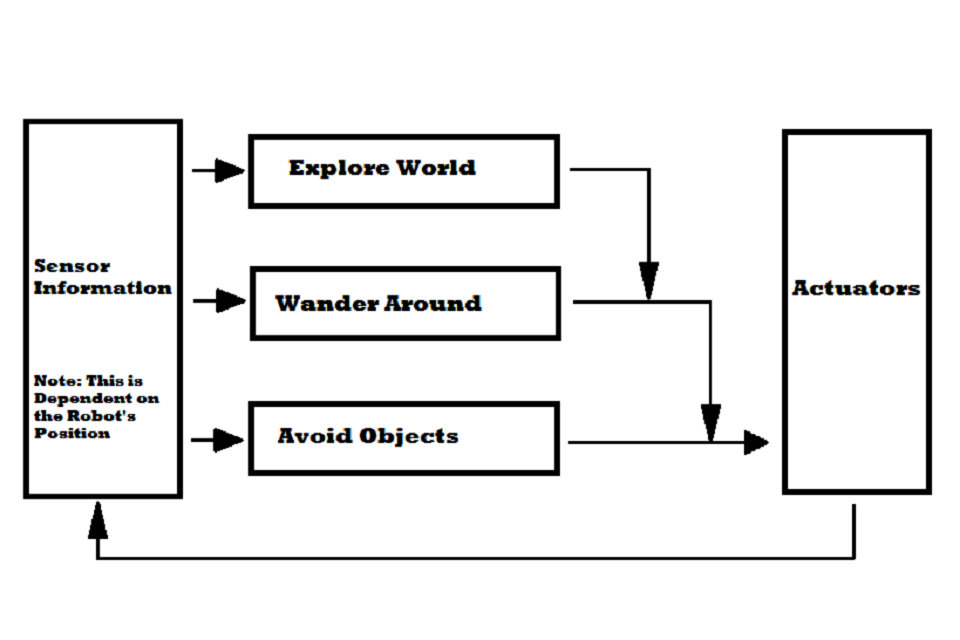
Subsumption-Architektur ist eine reaktive Roboterarchitektur, die stark mit verhaltensbasierter Robotik in Verbindung steht und in den 1980er und 1990er Jahren sehr beliebt war. Der Begriff wurde 1986 von Rodney Brooks und seinen Kollegen eingeführt. Die Subsumtion hatte einen großen Einfluss auf die autonome Robotik und andere Bereiche der Echtzeit-KI. Überblick…