Maximum Power Point Tracking (MPPT) oder manchmal nur Power Point Tracking (PPT) ist eine Technik, die häufig bei Windturbinen und Photovoltaik (PV) Solarsystemen verwendet wird, um die Energieentnahme unter allen Bedingungen zu maximieren.
Obwohl die Solarenergie hauptsächlich abgedeckt wird, gilt das Prinzip allgemein für Quellen mit variabler Leistung: zum Beispiel optische Energieübertragung und Thermophotovoltaik.
PV-Solarsysteme gibt es in vielen verschiedenen Konfigurationen hinsichtlich ihrer Beziehung zu Wechselrichtersystemen, externen Netzen, Batteriebänken oder anderen elektrischen Verbrauchern.Ungeachtet des letztendlichen Bestimmungszwecks der Solarenergie besteht das zentrale Problem von MPPT darin, dass die Effizienz der Energieübertragung von der Solarzelle sowohl von der auf die Solarmodule fallenden Sonneneinstrahlung als auch von den elektrischen Eigenschaften der Last abhängt. Wenn die Menge an Sonnenlicht variiert, ändert sich die Lastcharakteristik, die die höchste Leistungsübertragungseffizienz ergibt, so dass die Effizienz des Systems optimiert wird, wenn sich die Lastcharakteristik ändert, um die Leistungsübertragung bei höchster Effizienz zu halten. Diese Lastkennlinie wird als Maximum Power Point (MPP) bezeichnet, und MPPT ist der Prozess, um diesen Punkt zu finden und die Lastkennlinie dort zu halten. Elektrische Schaltungen können so entworfen werden, dass sie den photovoltaischen Zellen beliebige Lasten präsentieren und dann die Spannung, den Strom oder die Frequenz an andere Geräte oder Systeme anpassen, und MPPT löst das Problem der Auswahl der besten Last, die den Zellen präsentiert werden soll die am meisten nutzbare Leistung.
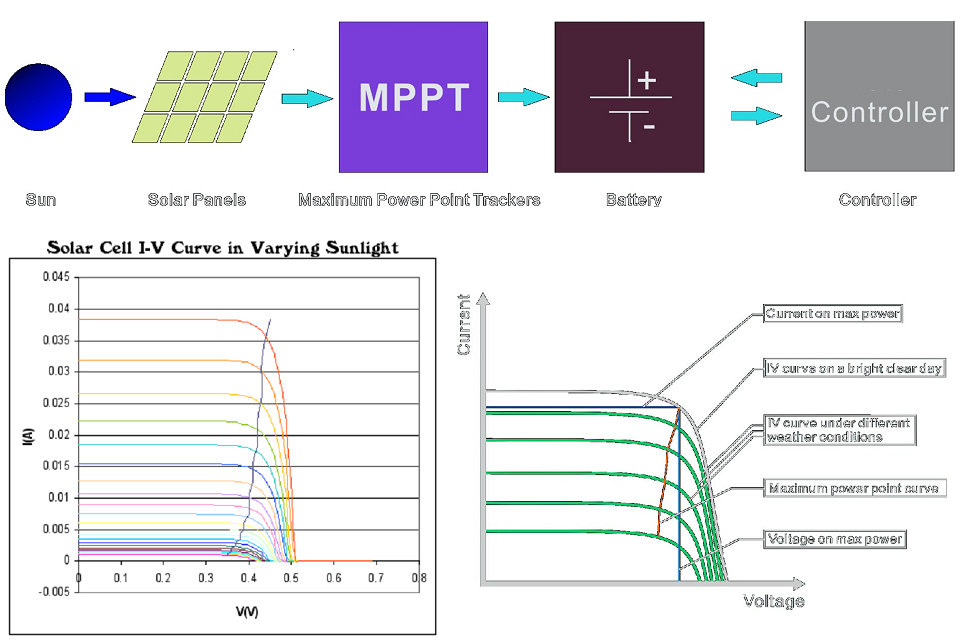
Solarzellen haben eine komplexe Beziehung zwischen Temperatur und Gesamtwiderstand, die zu einer nichtlinearen Ausgangsleistung führt, die anhand der IV-Kurve analysiert werden kann. Es ist der Zweck des MPPT-Systems, die Leistung der PV-Zellen zu messen und den richtigen Widerstand (Last) anzulegen, um die maximale Leistung für alle gegebenen Umgebungsbedingungen zu erhalten. MPPT-Vorrichtungen sind typischerweise in ein elektrisches Stromwandlersystem integriert, das eine Spannungs- oder Stromumwandlung, Filterung und Regulierung zum Antreiben verschiedener Lasten, einschließlich Stromversorgungsnetze, Batterien oder Motoren, bereitstellt.
Solar-Wechselrichter wandeln die Gleichstromleistung in Wechselstrom um und können MPPT enthalten: Solche Wechselrichter tasten die Ausgangsleistung (IV-Kurve) von den Solarmodulen ab und wenden den geeigneten Widerstand (Last) an, um die maximale Leistung zu erhalten.
Die Leistung am MPP (Pmpp) ist das Produkt der MPP-Spannung (Vmpp) und des MPP-Stroms (Impp).
Definitionen
Blick auf ein gleichmäßig ausgeleuchtetes Solarmodul
Das Strom-Spannungs-Diagramm, wie gegenüberliegend dargestellt, wird typischerweise so angelegt, dass die technische Stromrichtung des gemessenen Rückstroms der Solarzelle angezeigt wird. Der Strom wird somit im Gegensatz zur klassischen Diodencharakteristik positiv in der Beleuchtung angelegt.
Das Verhältnis zwischen der maximalen Leistung P MPP der Solarzelle am maximalen Leistungspunkt und dem Produkt der Leerlaufspannung UL und des Kurzschlussstroms IK wird Füllfaktor FF genannt:

mit der Funktion der Leerlaufspannung des Solarmoduls:
= Diodenfaktor
= Leerlaufspannung
= Sättigungsstrom
= Temperaturspannung
= Fotostrom






Der Photostrom steigt mit steigender Temperatur leicht an und wird in der Praxis meist vernachlässigt. Mit zunehmender Einstrahlung des Solarmoduls steigt der Strom annähernd proportional an, die Leistung steigt. Die Spannung ändert sich kaum. Mit steigender Temperatur fällt die Spannung etwas ab, weil der Sättigungsstrom, auch Dunkelstrom genannt, zunimmt.
Die Leistung, die sich aus dem Produkt der Spannung und des Stroms ergibt, nimmt somit bei konstanter Bestrahlung und steigender Modultemperatur ab. Typische Werte sind -0,45% pro Kelvin für kristalline Silizium-Solarzellen.
Folgende Eigenschaften werden in der Strom-Spannungs-Kennlinie als Erkennungsmerkmale für eine erfolgreiche Leistungsanpassung identifiziert:
Es gilt mit Leistungsanpassung im MPP:

Im MPP berührt die IU-Charakteristik die Hyperbel mit P = Pmpp = const.
Der MPP teilt seine Tangente in zwei gleich lange Abschnitte.
Die Diagonale im Rechteck der Punktkoordinaten ist parallel zur Tangente.
Die Erkennungsmerkmale sind auf die lokale maximale Leistungseigenschaft zurückzuführen (dp / dU = 0). Sie sind gut geeignet, um die Position der MPPs in den Kennlinien auch ohne Leistungsachse zu ermitteln oder zu überprüfen. Sie sind auch anwendbar, wenn die Achsenskalierung fehlt.
Berücksichtigung mehrerer in Reihe geschalteter Solarmodule mit Teilverschattung
Die nebenstehenden Abbildungen zeigen eine Reihe von zehn in Reihe geschalteten Solarmodulen: Die blau gestrichelte Kurve stellt den Fall dar, in dem alle Module gleichmäßig bestrahlt werden. Die schwarze Kurve steht für den Fall, dass zwei der zehn Module im Schatten liegen und nur 20% der Strahlung im Vergleich zu den anderen Modulen (durch diffuse Strahlung) erhalten.
Es ist zu sehen, dass es im schattierten Fall nicht mehr nur ein Leistungsmaximum gibt, sondern mehrere. Grün markiert ist der „globale MPP“, also der tatsächliche Punkt maximaler Leistung. Rot markiert ist der „local MPP“, also ein lokaler High Point auf der Leistungskurve.
Ursache für diesen Prozess sind die Bypass-Dioden, die zum Schutz der einzelnen Zellen in die Solarmodule integriert sind: Beim lokalen MPP werden alle Module mit dem gleichen geringen Strom betrieben, den die beschatteten Module noch liefern können (durch diffuse Bestrahlung) . Erst wenn die Spannung abgesenkt oder der Strom erhöht wird, reagieren die Bypass-Dioden der beschatteten Module und schließen diese Modulteile kurz, um sie zu überbrücken. Als Ergebnis ist die String-Spannung niedriger (die schattierten Module sind tatsächlich in der Kette „fehlend“), aber der Strom ist viel höher, was die höhere Leistung bei dem globalen Maximum erklärt.
Hintergrund
Photovoltaikzellen haben eine komplexe Beziehung zwischen ihrer Betriebsumgebung und der maximalen Leistung, die sie erzeugen können. Der Füllfaktor, abgekürzt FF, ist ein Parameter, der das nichtlineare elektrische Verhalten der Solarzelle charakterisiert. Der Füllfaktor ist definiert als das Verhältnis der maximalen Leistung von der Solarzelle zum Produkt der Leerlaufspannung Voc und des Kurzschlussstromes Isc. In tabellierten Daten wird es oft verwendet, um die maximale Leistung abzuschätzen, die eine Zelle unter gegebenen Bedingungen mit einer optimalen Last liefern kann, P = FF * Voc * Isc. Für die meisten Zwecke sind FF, Voc und Isc genug Information, um ein nützliches ungefähres Modell des elektrischen Verhaltens einer photovoltaischen Zelle unter typischen Bedingungen zu geben.
Für jeden gegebenen Satz von Betriebsbedingungen haben Zellen einen einzigen Arbeitspunkt, bei dem die Werte des Stroms (I) und der Spannung (V) der Zelle zu einer maximalen Ausgangsleistung führen. Diese Werte entsprechen einem bestimmten Belastungswiderstand, der gleich V / I ist, wie es durch das Ohmsche Gesetz spezifiziert ist. Die Leistung P ist gegeben durch P = V * I. Eine photovoltaische Zelle fungiert für den größten Teil ihrer Nutzkurve als Konstantstromquelle. In der MPP-Region einer photovoltaischen Zelle hat ihre Kurve jedoch eine ungefähr inverse exponentielle Beziehung zwischen Strom und Spannung. Aus der grundlegenden Schaltungstheorie wird die Leistung, die von oder zu einem Gerät geliefert wird, optimiert, wobei die Ableitung (graphisch, die Steigung) dI / dV der IV-Kurve gleich und entgegengesetzt zu dem I / V-Verhältnis ist (wobei dP / dV = 0). Dies ist als Maximum Power Point (MPP) bekannt und entspricht dem „Knie“ der Kurve.
Eine Last mit dem Widerstand R = V / I gleich dem Kehrwert dieses Wertes zieht die maximale Leistung aus dem Gerät. Dies wird manchmal als „charakteristischer Widerstand“ der Zelle bezeichnet. Dies ist eine dynamische Größe, die sich abhängig von der Beleuchtungsstärke sowie anderen Faktoren wie Temperatur und Alter der Zelle ändert. Wenn der Widerstand niedriger oder höher als dieser Wert ist, wird die entnommene Leistung geringer sein als das maximal verfügbare, und somit wird die Zelle nicht so effizient wie möglich verwendet. Maximum-Power-Point-Tracker verwenden verschiedene Arten von Steuerschaltungen oder -logik, um nach diesem Punkt zu suchen und somit der Konverterschaltung zu ermöglichen, die maximale von einer Zelle verfügbare Leistung zu extrahieren.
Implementierung
Wenn eine Last direkt mit dem Solarpanel verbunden ist, wird der Arbeitspunkt des Panels selten die maximale Leistung haben. Die vom Paneel gesehene Impedanz leitet den Arbeitspunkt des Solarpanels ab. Somit kann der Arbeitspunkt durch Variieren der Impedanz, die von der Platte gesehen wird, in Richtung des Spitzenleistungspunkts bewegt werden. Da Panels DC-Bauelemente sind, müssen DC-DC-Wandler verwendet werden, um die Impedanz einer Schaltung (Source) in die andere Schaltung (Last) umzuwandeln. Eine Änderung der relativen Einschaltdauer des DC-DC-Wandlers führt zu einer Impedanzänderung, wie sie von dem Panel gesehen wird. Bei einer bestimmten Impedanz (oder einem bestimmten Tastverhältnis) befindet sich der Arbeitspunkt am Spitzenleistungsübertragungspunkt. Die IV-Kurve des Paneels kann sich beträchtlich mit den Schwankungen der atmosphärischen Bedingungen, wie Strahldichte und Temperatur, ändern. Daher ist es nicht möglich, das Tastverhältnis bei solchen sich dynamisch ändernden Betriebsbedingungen festzulegen.
MPPT-Implementierungen verwenden Algorithmen, die häufig Feldspannungen und -ströme abtasten und dann das Tastverhältnis nach Bedarf anpassen. Zur Implementierung der Algorithmen werden Mikrocontroller eingesetzt. Moderne Implementierungen verwenden häufig größere Computer für die Analyse und die Lastprognose.
Einstufung
Controller können mehrere Strategien zur Optimierung der Ausgangsleistung eines Arrays befolgen.Maximum Power Point Tracker können unterschiedliche Algorithmen implementieren und basierend auf den Betriebsbedingungen des Arrays zwischen ihnen wechseln.
Störe und beobachte
Bei diesem Verfahren stellt die Steuerung die Spannung um einen kleinen Betrag von der Anordnung ein und misst die Leistung; Wenn die Leistung zunimmt, werden weitere Einstellungen in dieser Richtung versucht, bis die Leistung nicht mehr ansteigt. Dies wird als Störungs- und Beobachtungsmethode bezeichnet und ist am üblichsten, obwohl diese Methode zu Oszillationen der Leistungsabgabe führen kann. Es wird als Hill-Climbing-Methode bezeichnet, weil es vom Anstieg der Leistungskurve gegen die Spannung unterhalb des Maximalleistungspunktes und vom Fall über diesen Punkt abhängt. Perturb and Observe ist aufgrund seiner einfachen Implementierung die am häufigsten verwendete MPPT-Methode. Die Perturb- und Beobachtungsmethode kann zu einer Top-Level-Effizienz führen, sofern eine geeignete vorausschauende und adaptive Hill-Climbing-Strategie angewendet wird.
Inkrementelle Leitfähigkeit
Beim Inkremental-Leitwert-Verfahren misst die Steuerung inkrementelle Änderungen des Stroms und der Spannung des PV-Generators, um den Effekt einer Spannungsänderung vorherzusagen. Diese Methode erfordert mehr Rechenleistung in der Steuerung, kann jedoch die sich ändernden Bedingungen schneller verfolgen als die Störungs- und Beobachtungsmethode (P & amp; O). Wie der P & amp; O-Algorithmus kann er Oszillationen in der Leistungsabgabe erzeugen. Dieses Verfahren verwendet die inkrementale Leitfähigkeit (dI / dV) des photovoltaischen Feldes, um das Vorzeichen der Änderung der Leistung in Bezug auf die Spannung (dP / dV) zu berechnen.
Das inkrementale Leitwertverfahren berechnet den maximalen Leistungspunkt durch Vergleich des inkrementalen Leitwerts (IΔ / VΔ) mit dem Feldleitwert (I / V). Wenn diese beiden gleich sind (I / V = IΔ / VΔ), ist die Ausgangsspannung die MPP-Spannung. Die Steuerung hält diese Spannung aufrecht, bis sich die Bestrahlung ändert und der Vorgang wiederholt wird.
Die inkrementale Leitwertmethode basiert auf der Beobachtung, dass bei dem maximalen Leistungspunkt dP / dV = 0 ist und dass P = IV. Der Strom von der Anordnung kann als eine Funktion der Spannung ausgedrückt werden: P = I (V) V. Daher gilt dP / dV = VdI / dV + I (V). Die Einstellung auf Null ergibt: dI / dV = -I (V) / V. Daher wird der maximale Leistungspunkt erreicht, wenn der inkrementelle Leitwert gleich dem negativen Wert des momentanen Leitwerts ist.
Technische Verfahren
„Schattenmanagement“
Alle unten beschriebenen Verfahren suchen den MPP in relativ kleinen Inkrementen um das aktuelle Leistungsmaximum herum. Dies hat den Vorteil, dass der Solargenerator die meiste Zeit sehr nahe am MPP betrieben wird (hohe „MPP-Adaptionseffizienz“). Der Nachteil ist, dass der Tracker in einem teilweise beschatteten Solargenerator oft am lokalen MPP bleibt (siehe oben), ohne den Weg zum globalen MPP zu finden.
Deshalb haben die meisten Wechselrichterhersteller jetzt eine Zusatzfunktion integriert, die in regelmäßigen Abständen (in der Regel alle 5-10 Minuten) sehr schnell die gesamte Charakteristik des Solargenerators zur Suche nach dem globalen MPP durchläuft. Diese Funktion wird als „Shadow Management“ oder „Shadow Management“, manchmal auch als „Sweep-Funktion“ bezeichnet und ersetzt nicht die kontinuierliche MPP-Verfolgung.
Bei den meisten Herstellern ist die Funktion ab Werk aktiviert, bei anderen kann sie im Menü aktiviert werden. Der Ertragsverlust aufgrund des regelmäßigen Verlaufs der Kennlinie (während der der Generator natürlich nicht im MPP betrieben wird) wird beispielsweise mit „& lt; 0,2%“ angegeben, beispielsweise wird die Dauer zum Überfahren der Kennlinie 2 Sekunden genannt .
Es ist zu beachten, dass der Eingangsspannungsbereich des Wechselrichters ein begrenzender Faktor ist: Nur wenn die Anzahl der nicht beschatteten Module ausreicht, um die minimale Eingangsspannung des Wechselrichters allein mit diesen Modulen zu erreichen, kann es den globalen MPP steuern. Daher ist es wichtig, ausreichend lange Strings für die Schattierung zu bilden.(Früher war die Verwendung von Schatten zur Bildung vieler kurzer Strings seit Einführung der Schattenverwaltung obsolet.)
Methode der Spannungserhöhung
Auf die einfachste Weise, die maximale Leistung zu finden, erhöht der MPP-Tracker kontinuierlich die Belastung der Solarzelle von Null und erhöht die Leistungsabgabe. Wird das Leistungsmaximum erreicht, beginnt die Leistung wieder zu sinken, was als Abbruchkriterium für die Suche dient. Dies ist ein iterativer Prozess, der im MPP-Tracker ständig einen Mikroprozessor ausführt, so dass auch bei sich ändernden Einstrahlungsbedingungen immer eine Operation im Maximum Power Point stattfindet. Bei einem teilverschatteten Solargenerator bleibt der Regler auf dem lokalen Maximum, wenn er zufällig ist.
Methode der Lastsprünge
Bei der Methode der Lastsprünge (engl. Perturb and Observe) ändert der Controller periodisch die Last der Solarzelle in kleinen Schritten (load step) in eine bestimmte Richtung und misst dann die von der Solarzelle abgegebene Leistung. Wenn die nun gemessene Leistung höher ist als die gemessene Leistung der vorhergehenden Periode, behält der Controller diese Suchrichtung bei und macht den nächsten Leistungssprung. Wenn die gemessene Leistung kleiner als die der letzten Messperiode ist, ändert die Steuerung die Suchrichtung und führt nun Lastsprünge in die entgegengesetzte Richtung aus. Auf diese Weise wird die maximale Leistung ständig gesucht, mit dem Ergebnis, dass der genaue Punkt der maximalen Leistung nie gefunden wird, aber es wird ein Lastsprung angefahren, der kein Problem ist, wenn er klein genug ist. Es erzeugt eine Art Oszillation um das Leistungsmaximum herum. Wenn der Solargenerator teilweise beschattet ist, bleibt der Regler auf dem lokalen Maximum, wenn er zufällig ist.
Steigende Leitfähigkeit
Die Idee der Methode der inkrementellen Leitfähigkeit beruht darauf, die maximale Leistung basierend auf der Differenz und der spezifischen Leitfähigkeit der Solarzelle zu finden. Der maximale Leistungspunkt ist dadurch gekennzeichnet, dass die Änderung der Leistungsabgabe in Bezug auf die Spannungsänderung Null wird. Je nachdem, auf welcher Seite der Leistungskurve sich der aktuelle Lastpunkt befindet, steigt oder fällt das Leistungsspannungsverhältnis mit der Laständerung, was zu folgenden Gleichungen führt:
Auf der linken Seite des Maximums:
Direkt neben dem Maximum:


Durch Transformieren der Gleichungen werden die folgenden Bedingungen für die Steuerung erhalten, wobei I und U die aktuellen gemessenen Werte der Steuerperiode sind und dI, dU die Änderungen der vorhergehenden Steuerperiode sind.
Auf der linken Seite des Maximums:
Direkt neben dem Maximum:


Im Leistungsmaximum:

Unter Verwendung dieser Bedingung ändert der Controller die Last pro Steuerzyklus Schritt für Schritt in der Richtung, in der er sich dem Zustand der gewünschten maximalen Leistung nähert.Wenn das System diese Bedingung erfüllt, wurde das Leistungsmaximum gefunden und die Suche kann beendet werden. Wenn sich die Ausgangsleistung aufgrund der Beleuchtungsstärke der Solarzelle ändert, setzt der Controller die Suche fort.
Bei einem teilverschatteten Solargenerator bleibt der Regler auf dem lokalen Maximum, wenn er zufällig ist.
Methode der konstanten Spannung
Die Methode der konstanten Spannung basiert auf einer Beziehung zwischen der Leerlaufspannung der Solarzelle und der Spannung, bei der die Solarzelle die maximale Leistung liefert. Somit kann auf Grund der Kenntnis der Leerlaufspannung auf die zur Beseitigung der maximal möglichen Last mögliche Spannung und damit der Last geschlossen werden. Da sich die Leerlaufspannung aufgrund verschiedener Parameter ändert, muss die Steuerung diese während des Betriebs regelmäßig messen. Zu diesem Zweck wird die Last für die Dauer der Spannungsmessung von der Solarzelle getrennt. Auf Basis der nun gemessenen Leerlaufspannung kann der Regler die optimale Last berechnen und beim Wiederanschließen der Last und der Solarzelle einstellen. Da die Beziehung zwischen Leerlaufspannung und optimaler Lastspannung empirisch bestimmt wird und von vielen Parametern abhängt, wird die exakte maximale Leistung nicht erreicht. Der Algorithmus ist also im engeren Sinne niemand, der nach der tatsächlichen Maximalleistung sucht, und arbeitet nicht in teilverschachtetem Solargenerator.
Technische Umsetzung
Software
In technischen Implementierungen dieses Verfahrens führt ein Mikrocontroller oder ein digitaler Signalprozessor üblicherweise eine der möglichen Methoden aus. In diesem Fall stellt der Prozessor die erforderlichen Messdaten von einem Analog-Digital-Wandler zur Verfügung, mit dem dieser die notwendigen Berechnungen durchführen kann und das Ergebnis mittels Pulsweitenmodulation an einen DC-DC-Wandler weitergibt.
Hardware
Da die Last der Solarzelle aufgrund der Lastspannung angepasst wird, aber die Ausgangsspannung des Reglers nahezu konstant sein soll, benötigt sie einen DC-DC-Wandler, um die Spannungsdifferenzen und damit die Belastung der Solarzelle einstellen zu können. Bei einer Photovoltaikanlage ist es durchaus möglich, dass sich der Spannungsbereich der optimalen Lastspannung der Solarzelle um die Spannung des zu ladenden Akkumulators herum bewegt. Somit kann die Eingangsspannung des DC-DC-Wandlers sowohl größer als auch kleiner als seine Ausgangsspannung sein. Um diese Anforderung zu erfüllen, ist eine Wandlertopologie erforderlich, die diese Eigenschaft erfüllt, wie beispielsweise der Inverswandler, der Split-Pi-Wandler oder ein Wandler höherer Ordnung (UC-Wandler, SEPIC-Wandler, Doppel-Wechselrichter).
Aktueller Sweep
Das Stromwobbelverfahren verwendet eine Wobbelwellenform für den Strom der PV-Anordnung, so dass die IV-Charakteristik der PV-Anordnung in festen Zeitintervallen erhalten und aktualisiert wird.Die maximale Arbeitspunktspannung kann dann aus der Kennlinie in gleichen Intervallen berechnet werden.
Konstante Spannung
Der Begriff „konstante Spannung“ bei der MPP – Nachführung wird verwendet, um verschiedene Techniken von verschiedenen Autoren zu beschreiben, eine, bei der die Ausgangsspannung unter allen Bedingungen auf einen konstanten Wert geregelt wird und bei der die Ausgangsspannung basierend auf einem konstanten Verhältnis geregelt wird gemessene Leerlaufspannung (VOC). Die letztere Technik wird von einigen Autoren als „Open-Voltage“ -Methode bezeichnet. Wenn die Ausgangsspannung konstant gehalten wird, gibt es keinen Versuch, den maximalen Leistungspunkt zu verfolgen, daher handelt es sich nicht um ein Maximum-Power-Point-Tracking-Verfahren im engeren Sinne, obwohl es in Fällen, in denen das MPP-Tracking versagt, einige Vorteile hat. und daher wird es manchmal verwendet, um eine MPPT-Methode in diesen Fällen zu ergänzen.
Bei dem MPPT-Verfahren mit „konstanter Spannung“ (auch „Open-Voltage-Verfahren“ genannt) wird die an die Last gelieferte Leistung momentan unterbrochen und die Leerlaufspannung mit Nullstrom wird gemessen. Die Steuerung nimmt dann den Betrieb mit der Spannung wieder auf, die bei einem festen Verhältnis, wie beispielsweise 0,76, der Leerlaufspannung VOC gesteuert wird. Dies ist normalerweise ein Wert, der für die erwarteten Betriebsbedingungen empirisch oder modellbasiert als maximaler Leistungspunkt ermittelt wurde. Der Arbeitspunkt der PV-Anordnung wird somit in der Nähe des MPP gehalten, indem die Feldspannung geregelt und an die feste Referenzspannung Vref = kVOC angepasst wird. Der Wert von Vref kann auch so gewählt werden, dass er eine optimale Leistung relativ zu anderen Faktoren sowie dem MPP ergibt, aber die zentrale Idee bei dieser Technik ist, dass Vref als ein Verhältnis zu VOC bestimmt wird.
Eine der inhärenten Annäherungen an das „Konstantspannungs“ -Verhältnis ist, dass das Verhältnis der MPP-Spannung zu VOC nur ungefähr konstant ist, so dass es Spielraum für weitere mögliche Optimierung lässt.
Methodenvergleich
Sowohl Störung und Beobachtung als auch inkrementelle Leitfähigkeit sind Beispiele für „Hill-Climbing“ -Methoden, die das lokale Maximum der Leistungskurve für den Betriebszustand der PV-Anlage finden und so einen echten maximalen Leistungspunkt bereitstellen können.
Die Störungs- und Beobachtungsmethode erfordert eine oszillierende Leistungsabgabe um den maximalen Leistungspunkt herum, sogar unter einer Bestrahlungsstärke im stationären Zustand.
Die inkrementelle Konduktanzmethode hat den Vorteil gegenüber der Perturb- und Beobachtungs- (P & amp; O) -Methode, dass sie den maximalen Leistungspunkt bestimmen kann, ohne um diesen Wert zu oszillieren. Es kann die Verfolgung des maximalen Leistungspunktes unter schnell variierenden Bestrahlungsbedingungen mit höherer Genauigkeit als das Stör- und Beobachtungsverfahren durchführen. Das inkrementelle Leitwertverfahren kann jedoch (unbeabsichtigt) Schwingungen erzeugen und unter schnell wechselnden atmosphärischen Bedingungen unregelmäßig arbeiten. Die Abtastfrequenz wird aufgrund der höheren Komplexität des Algorithmus im Vergleich zur P & amp; O-Methode verringert.
Bei dem Verfahren mit konstanter Spannungsrate (oder „offener Spannung“) muss der Strom von der photovoltaischen Anordnung kurzzeitig auf Null gesetzt werden, um die Leerlaufspannung zu messen, und danach auf einen vorbestimmten Prozentsatz der gemessenen Spannung, üblicherweise um 76%, eingestellt werden. Während der Zeit, in der der Strom auf Null gesetzt wird, kann Energie verschwendet werden. Die Annäherung von 76% als das MPP / VOC-Verhältnis ist nicht notwendigerweise genau. Obwohl sie einfach und kostengünstig zu implementieren sind, verringern die Unterbrechungen die Array-Effizienz und stellen nicht sicher, dass der tatsächliche maximale Leistungspunkt gefunden wird. Die Effizienz einiger Systeme kann jedoch über 95% betragen.
MPPT-Platzierung
Herkömmliche Solarwechselrichter führen MPPT für die gesamte PV-Anlage (Modulassoziation) als Ganzes durch. In solchen Systemen fließt der gleiche Strom, der durch den Wechselrichter diktiert wird, durch alle Module in der Kette (Serie). Da verschiedene Module unterschiedliche IV-Kurven und unterschiedliche MPPs aufweisen (aufgrund von Fertigungstoleranzen, partieller Schattierung usw.) bedeutet diese Architektur, dass einige Module unterhalb ihres MPP arbeiten, was zu einer geringeren Effizienz führt.
Einige Unternehmen (siehe Power Optimizer) platzieren nun den maximalen Power Point Tracker in einzelne Module, so dass jeder trotz ungleichmäßiger Schattierung, Verschmutzung oder elektrischer Fehlanpassung mit höchster Effizienz arbeiten kann.
Daten deuten darauf hin, dass ein Wechselrichter mit einem MPPT für ein Projekt mit nach Osten und Westen ausgerichteten Modulen keine Nachteile im Vergleich zu zwei Wechselrichtern oder einem Wechselrichter mit mehr als einem MPPT aufweist.
Betrieb mit Batterien
In der Nacht kann eine netzunabhängige PV-Anlage Batterien verwenden, um Lasten zu versorgen.Obwohl die Spannung des vollständig geladenen Akkus in der Nähe der maximalen Netzspannung des PV-Panels liegt, ist dies bei Sonnenaufgang wahrscheinlich nicht der Fall, wenn der Akku teilweise entladen wurde. Der Ladevorgang kann bei einer Spannung beginnen, die erheblich unter der maximalen Leistungspunktspannung des PV-Moduls liegt, und ein MPPT kann diese Abweichung beheben.
Wenn die Batterien in einem Inselnetzsystem vollständig geladen sind und die PV-Produktion die lokalen Lasten übersteigt, kann ein MPPT das Panel nicht mehr an seinem maximalen Leistungspunkt betreiben, da die überschüssige Leistung keine Last hat, um es zu absorbieren. Der MPPT muss dann den Betriebspunkt des PV-Moduls vom Spitzenleistungspunkt weg verschieben, bis die Produktion genau der Nachfrage entspricht. (Ein alternativer Ansatz, der üblicherweise in Raumfahrzeugen verwendet wird, besteht darin, überschüssige PV-Energie in eine ohmsche Last umzulenken, so dass das Panel kontinuierlich an seinem Spitzenleistungspunkt arbeiten kann.)
Bei einer netzgekoppelten Photovoltaikanlage wird der gesamte Strom aus Solarmodulen an das Netz gesendet. Daher wird der MPPT in einer netzgekoppelten PV-Anlage immer versuchen, die PV-Module an ihrem maximalen Leistungspunkt zu betreiben.