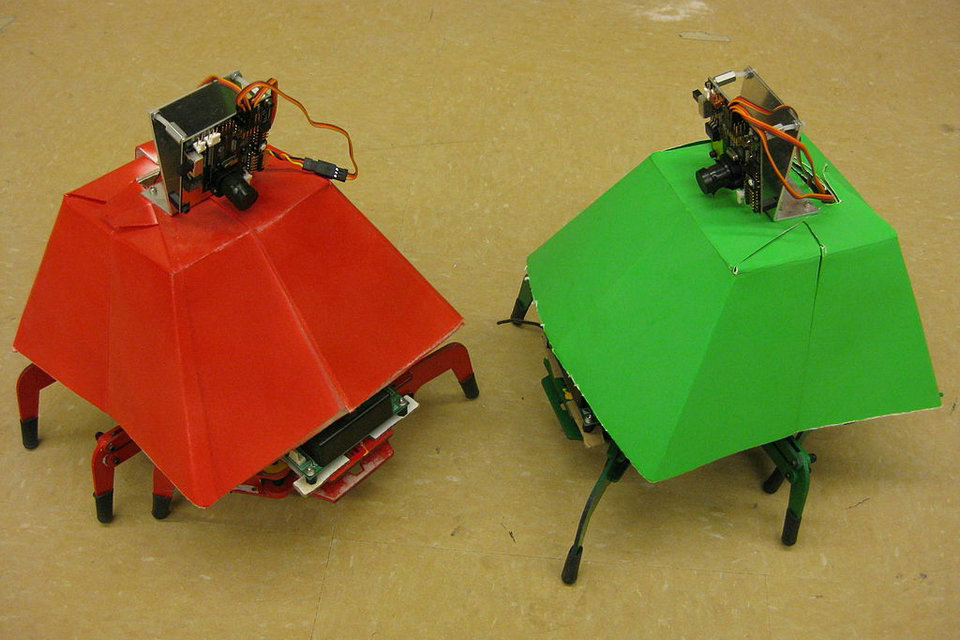
الروبوتات اللينة هي حقل معين من الروبوتات التي تتعامل مع بناء الروبوتات من مواد شديدة التوافق ، مماثلة لتلك الموجودة في الكائنات الحية. تعتمد الروبوتات الناعمة بشكل كبير على الطريقة التي تتحرك بها الكائنات الحية وتتكيّف مع محيطها. وعلى النقيض من الروبوتات المبنية من مواد صلبة ، تسمح الروبوتات الناعمة بزيادة…